
イノベーションセンター
センシング研究開発部
竹中 一馬
1. はじめに
ネットゼロエミッションやサーキュラーエコノミーなどの社会課題を解決するため,電力の見える化によるエネルギーの有効利用が求められている。電流センサは,電源・制御回路の評価や,FPGA(Field-programmable Gate Array)等の低電圧デバイスの消費電力量測定などの微小電流測定から,工場における機器の消費電力量測定や保守・保全,モータの電力効率測定,風力発電機や太陽電池の発電量測定などの大電流測定まで,センシング手法として多岐にわたり使用されている。近年では,環境意識の高まりによりハイブリッド自動車(以下,HV)や電気自動車(以下,EV)が世界的に普及している。HVやEVでは,省電力化のためのインバータの高周波化,モータ出力増加による大電流化,およびパワーモジュールの高集積化がなされており,広帯域かつ大電流を測定できる小型の電流センサが望まれている。
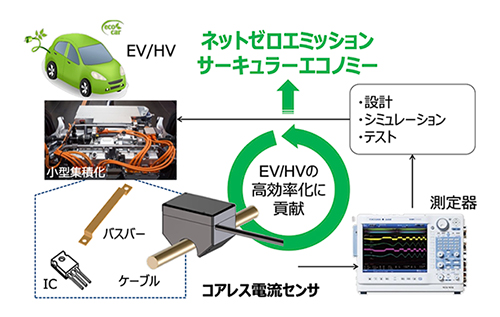
図1に示すように,EVやHVの開発工程や実車テスト時に電池からモータ間の導線に流れる電流を測定できれば,その測定値を設計や制御に反映し,電力の高効率化,つまりエネルギーの有効利用に貢献することができる。磁気コアを用いた従来の電流センサの利点として,①磁気コアにより導線周りに生じる磁界を集磁するため位置依存性が小さい,②磁気コア内で外部磁界がキャンセルされるため外部磁界の影響が小さい,という2点が挙げられる。つまり,磁気コアを用いた従来の電流センサは,取り付け時にセンサと導線の位置関係を考慮する必要がなく,また,外部磁界耐性の高い高精度な電流測定が可能である。一方,大電流測定時には磁気コアを大きくする必要があり,EVやHV車内の電池やモータ付近の密集したエリアにある測定対象導線へのアクセスが容易ではないという課題がある。上記の課題を解決すべく,弊社では,直流から広帯域かつ大電流を測定でき,小型化により測定対象へのアクセスが可能となるコアレス電流センサを開発している。表1に目標スペックを示す。
| 項目 | 目標スペック |
|---|---|
| 対象 | ケーブル(円形断面) |
| 最大電流値 | 1000 Arms |
| 帯域 | DC~10 MHz |
| 精度 | 5% |
| ヘッドサイズ | 35×40×50 mm3 |
磁気コアレス化にあたっての上記2点への対応として,本稿では,①複数の磁気センサを用いて導線位置を推定する位置推定アルゴリズムを用いた電流センサ(1)(3),②外部磁界が磁気センサに及ぼす影響を除去する磁気シールドを用いた電流センサ(2)(3)の2種類について紹介する。
2. 位置推定アルゴリズムを用いた電流センサ
単一の磁気センサを用いてHVやEV内のコンバータ-インバータ間の電流を測定する場合,測定電流(以下,往路電流)が近接する逆向きの電流(以下,復路電流)の磁界の影響を受けるという問題があった。そこで,本開発では,往路および復路電流が流れる平行導線を想定し,複数のデジタル磁気センサを用いて導線位置を推定した上で,往路および復路電流による磁界をそれぞれ分離する位置推定アルゴリズムの開発を行った。また,求められた測定対象ケーブルと磁気センサの距離からアナログ磁気センサの出力を補正した上でアナログ電圧をリアルタイムに出力し,さらには,直流から低周波までの電流測定には磁気センサを,低周波から数MHzの交流測定にはロゴスキーセンサを用いることで,これらの出力を結合する信号処理回路の開発を行った。
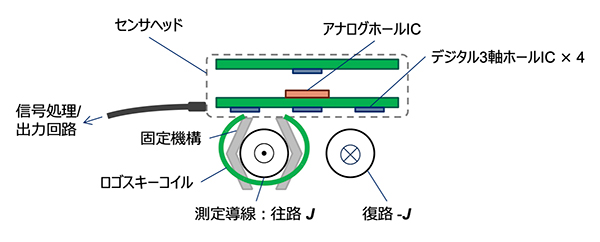
電流センサヘッドの外観図を図2に示す。センサヘッドには4つのデジタル三軸磁気ホールICと1つのアナログ一軸リニアホールICが含まれる。デジタル三軸ホールICには,素子の性質上10 msec程度の遅延があるため波形出力には不向きである。一方,アナログ一軸リニアホールICは,遅延は200 µsec程度と少ないが,一軸であるため磁気ベクトルを測定することができない。そのため,波形出力にはアナログ一軸リニアホールICを用い,補正係数の算出にはデジタル三軸ホールICを用いるハイブリッド構造とした。本構成では,磁気センサは樹脂筐体により覆われた形状になっており,ロゴスキーセンサはセンサヘッドに付属している。センサヘッドをさらに小型にするため,磁気センサとロゴスキーセンサの信号処理はセンサヘッドと切り離した回路部にて行っている。このような構成にすることで,大電流測定が可能で,かつ従来のCT型プローブと比べて体積比として1/8程度の小型化を実現した。
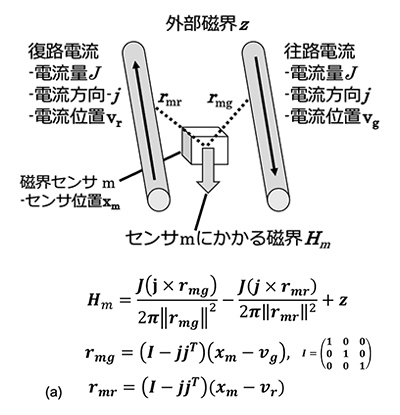
位置推定アルゴリズムは,図3に示すように,例えば電池-インバータ間のように,測定対象である往路電流に対して平行かつ逆向きに復路電流が近接して流れている場合を想定している。そのため,センサには往路電流および復路電流による磁界が合成されて印加されており,センサヘッド内にあるデジタル三軸ホールICには,往路電流と復路電流からそれぞれ生じる往路磁界Hmg(m=1~4)と復路磁界Hmr,それに加えて,電流に依らず均一に作用する背景磁界z が印加される。この時,各磁気センサに加わる磁界Hm は図3のような式で表される。4つのデジタル三軸ホールICから得られた測定磁界ベクトルと予め規定したセンサ位置から,4つの連立式が成立する。電流方向ベクトルと磁界ベクトルが直交しているため,電流に対して垂直となる平面上に導線位置,磁気センサ位置,および磁界ベクトルを射影することができる。このように三次元空間上から二次元平面上に射影することにより,演算の手間を省いて導線位置rmg およびrmr を求めることができる。導線位置rmg およびrmr はデジタル三軸ホールICと導線の位置ベクトルになるため,アナログ一軸リニアホールICと導線間の位置ベクトルに修正して補正係数を算出する。計算の詳細については引用文献(1)を参照いただきたい。
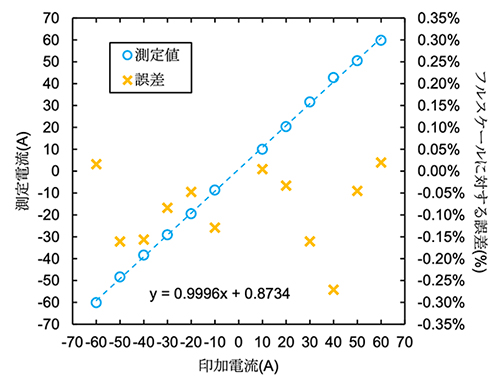
実験の構成図を図4に示す。太さ5 mmの2本のアルミ棒を中心間距離14 mmで平行に配置する。電流源の正極および負極を2本のアルミ棒の片端にそれぞれ取り付け,もう一方の片端を短絡する。センサヘッドを測定導線上に配置し,ロゴスキーコイルは片方の導線をクランプするようにする。参照として,測定導線を電流プローブによりクランプして測定する。本例では,図5および図6に示したデータを除き,図5で算出した補正係数を使用して評価した。電流推定の精度を評価するため,-60~+60 Aまで10 A刻みで印加電流と推定値の誤差を評価した。
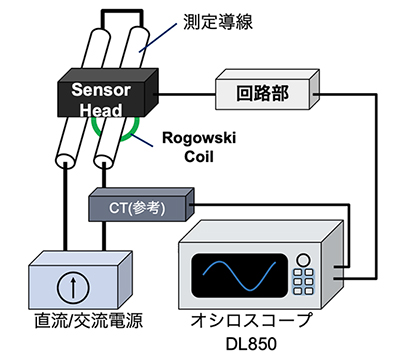
図5に示すように,印加電流と推定電流がほぼリニアになることを確認した。また,誤差=(入力電流値-センサ計測値)/(センサのスパン)と定義し,フルスケール1000 Aに対する誤差は±0.3%以内であることを確認した。誤差要因として,デジタル三軸磁気センサのノイズフロアによる影響が考えられる。
次に,導線とセンサの位置関係による印加電流と推定値の誤差について評価した。センサヘッドが導線の中心になるように配置し,電流を60 Aの直流電流に設定して導線の中心間距離を変えて測定を行ったところ,図6に示すように,推定誤差が±2.5%以内に収まっていることを確認した。導線の中心間距離が14 mmから29.5 mmに変化することにより,磁気センサに加わる合成磁界の計算値は最大で20%程度変動するが,誤差が±2.5%程度に収まっており導線とセンサの位置関係が変化しても位置補正が適切に行われていることが示された。
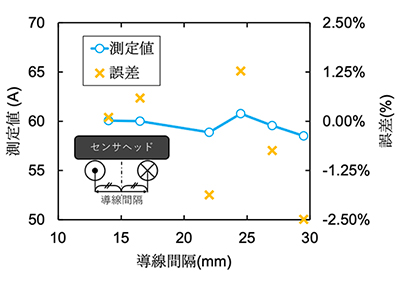
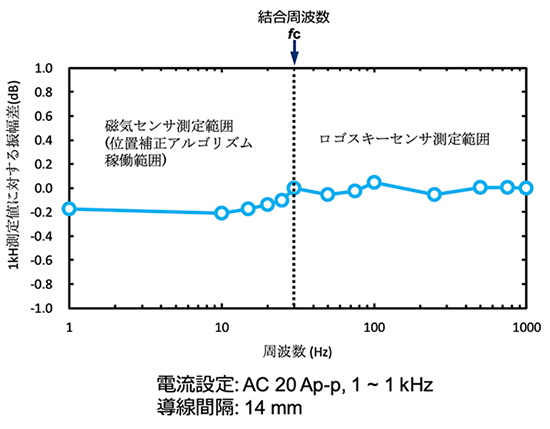
図7に,低周波側測定信号と高周波側測定信号をそれぞれ結合回路にて加算した後の周波数特性の平坦度を評価した結果を示した。振幅を20 Ap-pに固定し,周波数を1 Hzから1 kHzで測定した。1 kHz以上の周波数では,測定信号がロゴスキーセンサの測定信号が支配的になるため省略している。1 kHzの測定値を基準として,約0.2 dBの誤差に収まることを確認した。この程度の誤差は,ロゴスキーセンサと導線の位置のずれによるもので許容範囲内である。
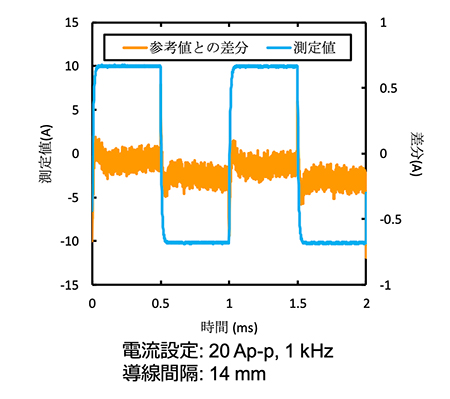
ロゴスキーセンサを単体で使用した矩形波測定では,電流が一定となる平坦部分にてドループ特性(垂下特性,直流に応答せず出力電圧が降下する現象)が見られる。本電流センサを用いて20 Ap-p,1 kHzの矩形波の測定を行ったところ,図8に示すように,測定波形が矩形波の立ち上がりおよび立ち下がりに追従し,ドループ特性が現れておらず,矩形波の波形が再現されていることが確認された。
次回に続く-
参考文献
- 野口直記,小河晃太朗,他,“DC測定可能な広帯域コアレス電流センサ”,日本磁気学会論文特集号,第4巻,1号,2020,p. 27-31
- 寺尾美菜子,小河晃太朗,他,“小型電流センサ用磁気シールドの設計”,第44回日本磁気学会学術講演会概要集,2020,p. 58
- 竹中一馬,寺尾美菜子,他,“大電流および交流/直流の測定が可能な小型コアレス電流センサの要素技術開発”,横河技報,Vol. 65,No. 2,2023,p. 9-14(p. 59-64)
【著者紹介】
竹中 一馬(たけなか かずま)
横河電機株式会社
マーケティング本部 イノベーションセンター
センシング研究開発部
センシングシステムグループ長
■略歴
2004年 東京大学大学院工学系研究科
修士課程修了(機械工学専攻)
2006年 横河電機株式会社 入社
2011年 NMEMS技術研究組合 出向
2015年 横河電機株式会社 帰任 現在に至る
これまでにEV/HV用コアレス電流センサ、磁気分布測定用センサ、単結晶ダイヤモンドを用いた圧力センサ等の研究開発に従事。近年ではCCU(Carbon dioxide Capture and Utilization)やリチウムイオン電池に関連する研究テーマに従事。2015年より東京大学非常勤講師。技術経営修士(MOT)。