
機械知能工学科 教授
熊谷正朗
センサの信号面の変化
一般用のセンサが多様化しているように、ロボット用のセンサも様々である。ロボット開発をするために使うセンサとしては、1990年代はまだまだ、「センサそのもの」だけがパッケージングされたものが多かった。
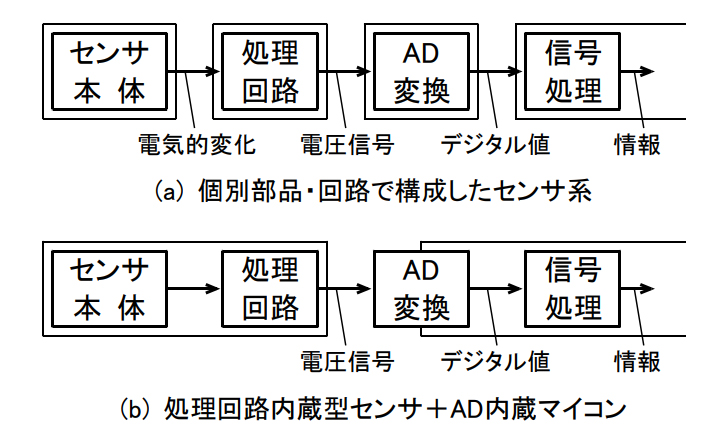
具体的には、物理・化学的現象をそのまま部品にした「生」のセンサ本体(図2(a))、その信号を増幅・変換・フィルタ処理をし(温度センサIC等)、計測原理を実現するアナログ回路(振動ジャイロ等)を「センサ部品」内に持ち(同(b))、ある程度「料理」された信号を出力する。たとえば、小型のカメラモジュールも、撮像のためのCCD素子本体、それを駆動し映像信号として出力する周辺チップが基板上に一括搭載されていた(コンピュータのないアナログ主体の電子回路)。
それが2000年ころにはセンサ部品内でデジタル化されるものが増え(同(c))、さらにマイコンの高性能化、低コスト化が進んで、センサ部品のなかに処理用のプロセサ(コンピュータ)まで入ることが一般的になってきた(同(d))。身近な例ではコンピュータのマウスがあり、以前は「玉」が転がり(今の若者には通じにくくなりつつある)、ローラで回転をとり、ロータリーエンコーダで計測していたが(以前のPC9801シリーズのマウスコネクタはそのパルス信号そのものを受付け、PC側に数えるカウンタがあった)、いまは低画素・高速のカメラで撮影・画像処理した結果として、センサから見える面の移動計測=マウスの移動の計測をしている。
このような変化に伴い、センサの信号も変わってきている。従来はアナログの電気的変化(電圧・電流・抵抗・容量など)が出力され、これをアナログ回路で受けて、アナログデジタル変換をするハードウエアを実装していたが、センサ側にコンピュータまで入った結果、そのセンサと利用側のコンピュータの間が、コンピュータ同士のデジタル通信(SPI, I2C等)になってきた。PCに接続して使うことが前提のセンサであれば、USB接続(実際には、USB-シリアル変換を内蔵したケースもよくある)のものもあり、回路に不慣れな場合でも「挿せば動く」ようになってきている。あるいは、センサ自身がネットワーク接続できるようになっているものも珍しくはない(ネットワークカメラもこの形式)。1990年代にもこのようなコンピュータおよび処理内蔵型のものはあったが、一般には高価な装置型センサの形式であり、それが数百円の安いセンサにも一般化したという点が変化である。特に、ゲーム機やスマホに搭載されるような、数が出ることが期待されるセンサから真っ先にこのデジタル通信化が進んだ印象がある。
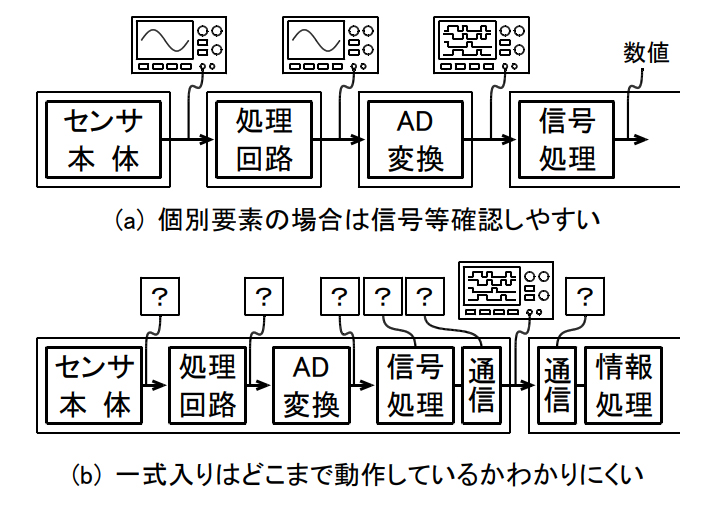
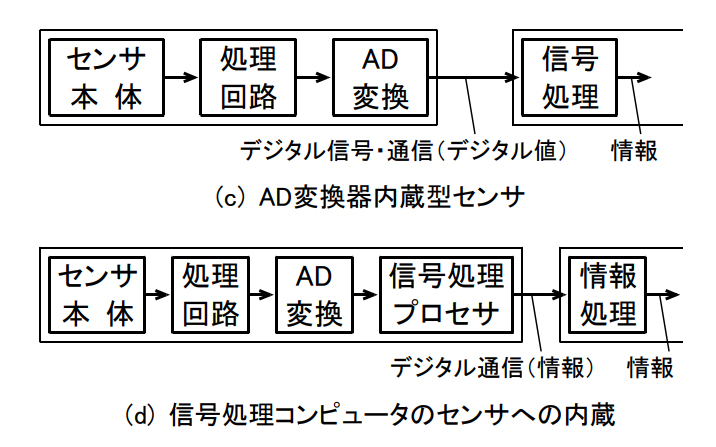
ただし、この変化には利点欠点がある。利点は明確で、ある程度の~高度な専門知識を必要とするアナログ処理部分(センシング原理はアナログなので、それが無くなるわけではない)をパッケージ内に収め、センサ周囲の性能を保証し、電源を繋ぐだけにしたこと、マイコンと数本の線で繋ぐだけであとはソフトを書ければ良く、特にソフト系の組み込み技術者にも扱いやすくなったことが上げられる。一方で、全体がブラックボックス化して、かつソフトがなければ動作しないため、うまく動かないときに、部品としてのセンサそのものが悪いのか、通信部分(センサ・マイコンの通信インタフェースの設定含む)が悪いのか、センサの使い方(初期化や計測条件の設定だけで面倒)が悪いのか、といった解析が、以前はオシロスコープを順番に当てれば良かったことに比べて、難易度が上がっている(図3)。言い換えれば「サンプルなどを見つけてきて一発で動けばすごく良い」が、「ひとたびトラブルが起きると以前よりかなり大変」である。
次週に続く―
著者
熊谷正朗(くまがいまさあき)
東北学院大学工学部 機械知能工学科 教授
略歴:
2000年 東北大学大学院工学研究科修了、博士(工学)。同年 東北大学助手。2003年東北学院大学講師、助教授、准教授を経て、2013年教授。2008年より仙台市地域連携フェローを兼任。
主にメカトロニクス、ロボット系の講義を担当し、仙台市地域連携フェローでも「基礎からのメカトロニクスセミナー」を実施。