Cellid(株)は(株)大林組の建設現場において、独自のAR技術“Cellid SLAM*1”を用いて、作業員の3次元位置情報の取得に成功した。
Cellid SLAMの空間認識アルゴリズムは、既に現場に導入されている汎用単眼カメラの映像のみを入力情報とし、非GNSS環境を含む大規模な建設現場において、GNSSやビーコンといった従来の自己位置推定技術を上回る測位精度を発揮することが確認された。
*1:Cellidが自社開発し2020年12月30日に公開したSLAM(Simultaneous Localization and Mapping 自己位置推定と周辺環境の地図を同時に実行する技術)。6件の特許出願技術を含み、画像のみを入力情報とするためビジュアルSLAMに分類される。
■目的
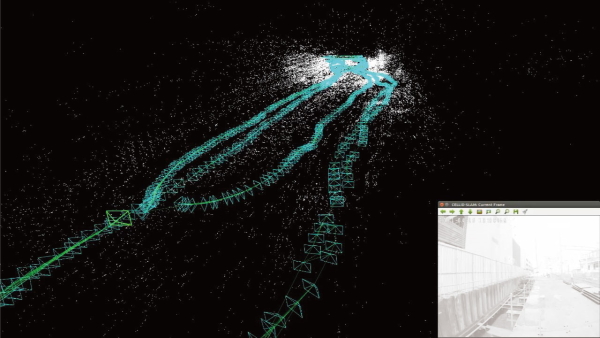
本実証実験は、①屋内外の大規模かつ複雑な構造をもつ建設現場において、汎用単眼カメラを装着して巡視する職員の移動経路を3次元の動線*2として把握することができるか、②BIM/CIMを含むデジタルツイン・プラットフォームとSLAMで取得した3次元位置情報を統合することで、安全管理や労務管理のためのツールとして発展する可能性があるか、を検証するために実施されたもの。
*2:自己位置推定の結果として取得するカメラの3次元位置をつなげた線。カメラ装着者の移動経路が「線」状に見える。
■Cellid SLAMの特徴はユースケースを広げる「汎用性」と速度と精度の「両立」
レーザーや赤外線を活用するSLAM技術は、専用センサを必要とすることから、デバイス費用が高額、かつセンサの設置のためのスペースや電源供給に課題があった。そのため、ウエアラブル・カメラや屋内用ドローンといった小型カメラと組み合わせた用途への提供は限定されてきた。
Cellid SLAMは汎用単眼カメラで動作する汎用性の高い技術である。
また、センサの代わりに画像データを活用する研究も進められているが、膨大な計算負荷に加え、現場での活用に耐える精度を確保することが難しく、実装には至っていなかった。①膨大な量の計算の高速処理、と、②自己位置推定の精度、の両立を、Cellid SLAMが解決したという。
■展望
BIM/CIMなどから構築されたデジタルツイン上にウエアラブル・カメラを装着した作業員などの位置情報を反映し情報の統合を進める。また、同一現場で同時に複数の作業員がウエアラブル・カメラを装着・撮影することで、位置情報だけではなく、大規模な現場の点群データなどをスピーディに収集することが可能。将来的には、本位置測位技術とAR技術などとを組み合わせることで、“AR付箋”などの早期実現も期待できるとしている。
*3: 現実空間の特定の3次元位置に「作業ガイド」や「注意事項」を、デジタルツイン側からの入力により、設置するサービス。現場の職員や作業員はタブレットやスマートグラス で現実空間に設置された情報を受領するため、遠隔でも具体性の高いコミュニケーションが可能になる。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000008.000030718.html