
山本 郁夫
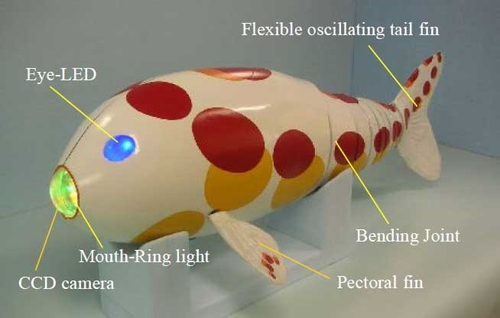
他にも、筆者らは、海中の生物の生活環境を乱さず観測できる魚ロボット(図10-図15等)を開発している。本物そっくりに泳ぎ、カメラを搭載すれば海中生物の自然体な生息状況を観測できる。





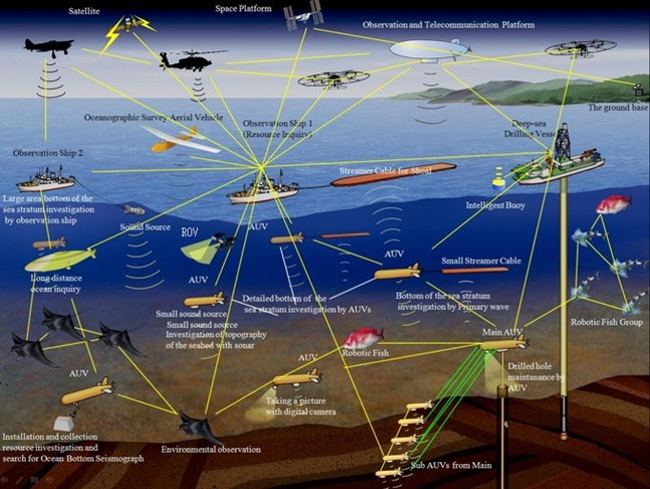
ロボットによる海洋観測は、観測の総合効率化を鑑み、将来的には図16に示すような海中から海上、空、宇宙まで、それぞれのロボットがネットワークで統合されてロボット群として海洋探査ができるものを目指していきたいと考える。2)3)
次週に続く-
参考文献
2) Ikuo Yamamoto, Research and Development of Past, Present, and Future AUV Technologies Masterclass in AUV Technology for Polar Science, University of Southampton and Natural Environment Research Council, published by the Society for Underwater Technology, ISBN0906940486, the British Library,(2007)
3) 山本郁夫,ロボット開発と海洋エネルギー利用促進,ながさき経済,No.307(2015),pp.1-7
【著者略歴】
山本郁夫(やまもと いくお)
長崎大学副学長・教授
1983年3月 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985年4月 三菱重工本社技術本部、
2004年4月 海洋研究開発機構、
2005年4月 九州大学大学院総合理工学府教授、
2007年4月 北九州市立大学教授、
2013年4月 長崎大学教授、
2019年4月 同大学副学長。
GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業株式会社で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。