松田 匠未
1.はじめに
近年,海中ロボットによる海洋探査が広く行われるようになっている.海中には水産資源や金属資源をはじめとした生活を支える資源が存在しているが,水圧や呼吸の問題によって人は水中に容易にアクセスできない.海中ロボットは人の代わりに海中を調査するためのプラットフォームとして期待されている.特に自律型海中ロボット(AUV: Autonomous Underwater Vehicle)は航法センサやコンピュータを搭載しており,全自動で海中探査を行うことができる.AUVの中でも海底に接近して画像観測などを行うことができるタイプをホバリング型AUVと呼ぶ.本稿ではホバリング型AUVについて説明するとともに,ホバリング型AUVによる研究事例を紹介する.
2.ホバリング型AUV
ホバリング型AUVは,推進器(スラスタ)によって自由度の高い航行が可能であり,一般的にサージ(前後),スウェイ(左右),ヒーブ(上下),ヨー(方位)の4自由度を制御することができる.AUVのタイプには他にクルーズ型とグライダー型がある.クルーズ型は細長い形状で後方にスラスタを搭載しており,推進性能が高いタイプである.一方,グライダー型はスラスタを搭載せず,機体の浮力を変化させて航行する.クルーズ型やグライダー型と比較して,ホバリング型AUVは海底に接近した状態を維持することができるため,詳細に観測が必要なエリアの調査に適している.
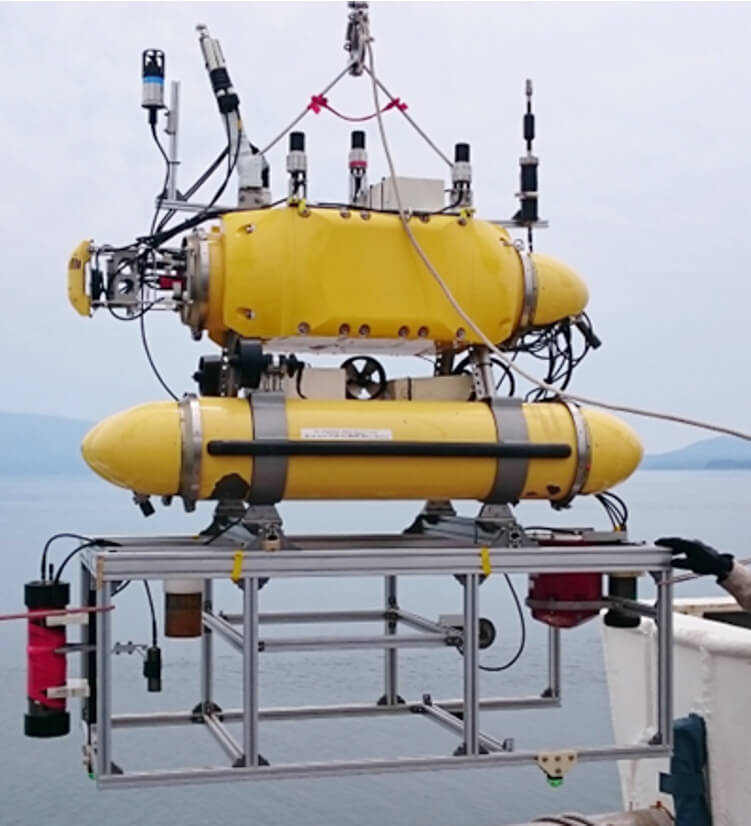
図1に東京大学生産技術研究所巻研究室で開発されたホバリング型AUV Tri-TONを示す.Tri-TONは鹿児島湾の熱水噴出地帯の画像観測などに適用されている1).水中では電波が急速に減衰するため,陸上のように衛星測位を直接利用することはできない.代わりにAUVは複数の航法センサを搭載し,センサの計測情報を統合することで水中での位置や姿勢を推定する.Tir-TONの場合,圧力センサやジャイロで水深と姿勢を計測する.またドップラ式対地速度計(DVL:Doppler Velocity Log)により海底からの高度や海底に対する速度を計測し,一軸の光ファイバジャイロ(FOG:Fiber Optic Gyro)により方向を計測する.このような複数のセンサの計測値を組み合わせることで,水中での3次元位置や姿勢を把握しながら,Tri-TONは海底に沿って探査活動を行う.
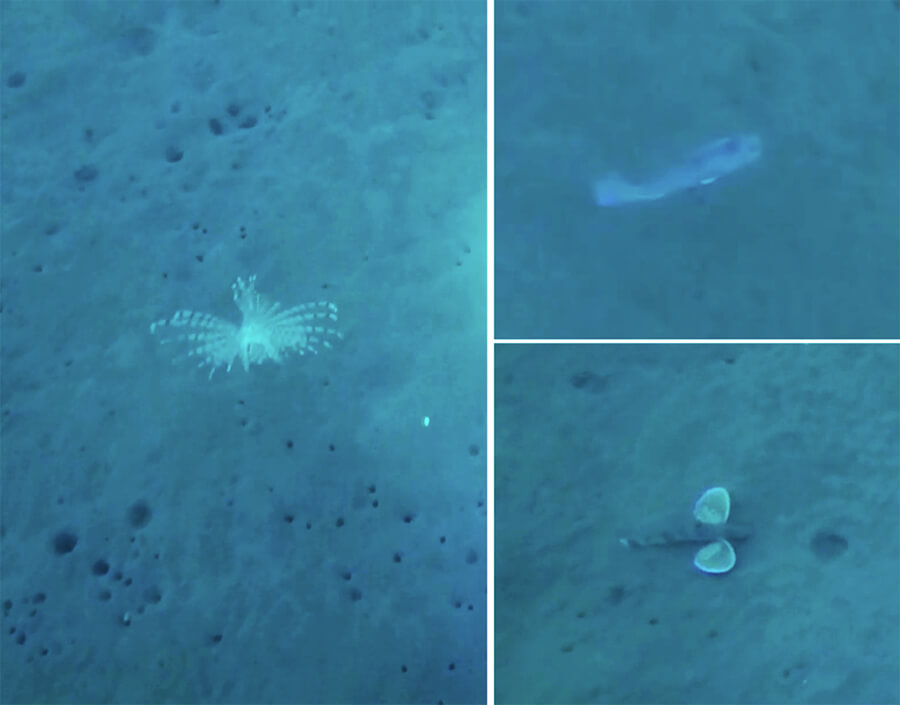
図2にホバリング型AUVが撮影した海底画像を示す.海底に接近することで海底環境の様子を知ることができる.
3.研究事例紹介
ここまでホバリング型AUVについて紹介してきた.海底に接近できるため他のタイプのAUVと比べて海底の精密観測に向いている.しかし水中では衛星測位を陸上のように利用できないため,水中での測位方法が重要となる.前章で述べたようにAUVは様々な航法センサの計測値を組み合わせて位置や姿勢を推定するが,センサには計測誤差が含まれており,時間とともに推定誤差が増加する.この推定誤差の増加を抑えるために様々な方法が研究されているが,これまで筆者らが開発した方法を紹介する.
3.1.海底ステーションを基準局とした探査手法
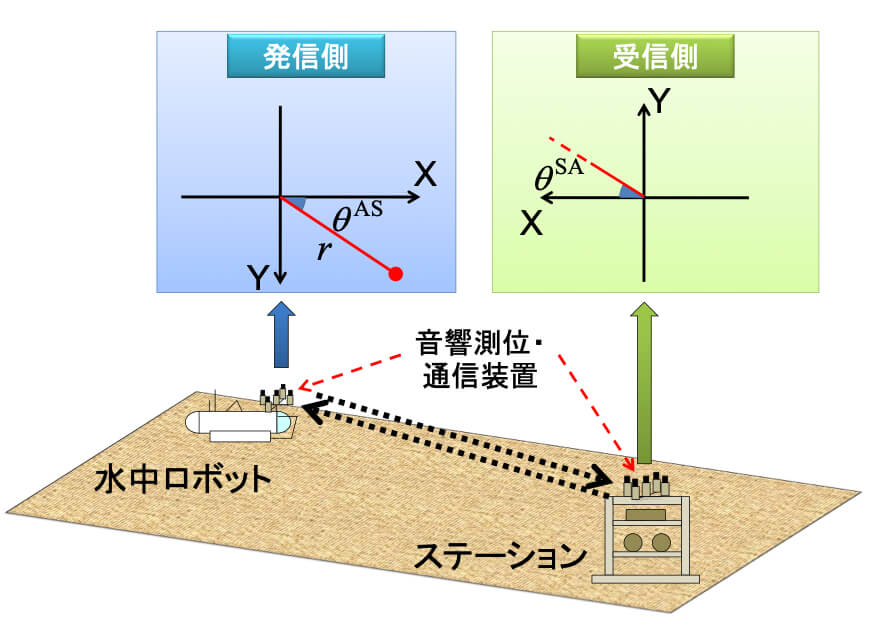
探査する海域に海底ステーションと呼ばれる測位の基準局を設置して,ステーションを基準にAUVは位置や姿勢を推定する方法を開発した2).ステーションの設置位置はあらかじめ船舶から音響測位装置を用いて地球上の位置(緯度・経度)を計測する.図3のようにAUVはステーションと相互に音響信号をやりとりして相対位置を求め,さらに搭載した航法センサの計測値と組み合わせることで,ステーションの周囲で高精度な測位が可能となる.本手法を搭載したAUVとステーションにより,鹿児島湾の海底画像観測に成功している.
次回に続く-
参考文献
- T. Maki, Y. Sato, T. Matsuda, A. Kume, T. Sakamaki, and T. Ura, “AUV Tri-TON-A hover-capable platform for 3D visualization of complicated surfaces,” Underwater Technology Symposium (UT), pp.1–6, 2013.
- T. Maki, T. Matsuda, T. Sakamaki, T. Ura, and J. Kojima, “Navigation Method for Underwater Vehicles Based on Mutual Acoustical Positioning With a Single Seafloor Station,” IEEE Journal of Oceanic Engineering, 38(1), pp.167-177, 2013
【著者紹介】
松田 匠未(まつだ たくみ)
明治大学理工学部 専任講師
■略歴
- 2012年3月東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 修士課程修了 修士(環境学)
- 2015年3月東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 博士課程修了 博士(環境学)
- 2015年4月~2019年3月東京大学生産技術研究所 特任研究員
- 2019年4月~2020年3月東京大学生産技術研究所 特任助教
- 2020年4月~現在東京大学生産技術研究所 協力研究員
- 2020年4月~2021年9月明治大学理工学部 助教を経て2021年9月より現職
■所属学会
- IEEE OES,日本船舶海洋工学会,海洋調査技術学会,日本ロボット学会
■受賞歴
- 2020年海洋調査技術学会 第32回研究成果発表会 若手優秀発表賞
- 2021年海のフロンティアを拓く岡村健二賞
- 2022年日本ロボット学会 第37回研究奨励賞
■専門分野
- 知能ロボティクス,フィールドロボティクス,自律型海中ロボット(AUV),マルチロボットシステム