松田 匠未
3.2.複数AUVの相互ランドマーク測位による探査手法
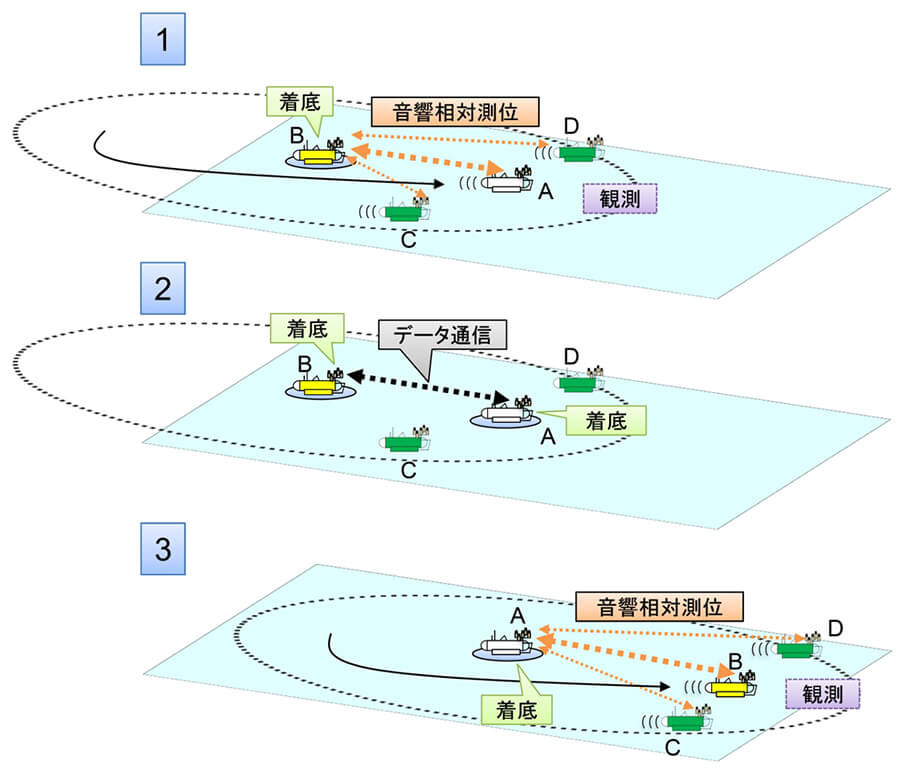
前節の方法でAUVはステーションの周囲で位置や姿勢を推定することが可能となる.しかし,ステーションとの通信圏内でないとAUVの推定誤差は徐々に増加する.ステーションの位置は固定であるため,AUVの観測範囲はステーションの周囲に限定されるという課題がある.この課題を解決するために,複数のAUVのうちの一台が交代で海底に着底し,AUVそのものが基準局(ステーション)としての役割を担う方法を開発した3, 4).着底AUVを基準にその他のAUVは,音響相対測位を実施しつつ海底探査を行う.必ず海底に着底したAUVが通信圏内に存在することで,すべてのAUVが着底AUVを基準に高精度な測位を実現しつつ,観測範囲を拡大していくことが可能である(図4).AUVはランドマークを交代するメイングループ(二台,図4のAとB)とそれ以外のサブグループ(図4のCとD)で構成される.
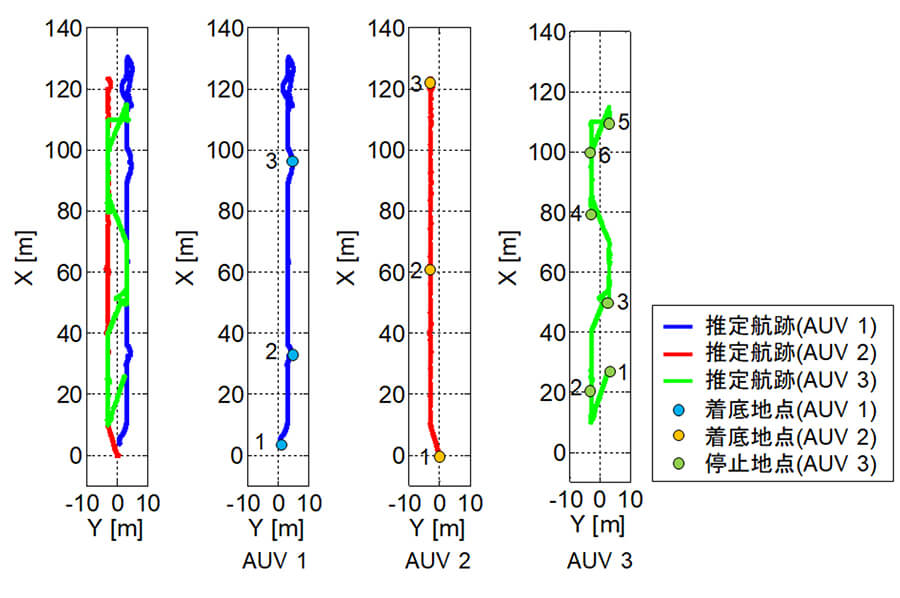
三台のホバリング型AUV(AUV 1とAUV 2がメイングループ,AUV 3がサブグループ)による実証試験を沼津の内浦湾において行った.図5に海域試験の様子を示す.図6に三台の推定航跡とそれぞれのAUVが着底・停止した地点を示す.AUV 1とAUV 2が交代で海底に着底して基準局となり,AUV 3は着底AUVを基準に位置・姿勢を推定しつつ,海底観測を行った.海域試験を通じて,提案手法によって観測エリアを拡大しながら探査可能であることが示された.

3.3.高性能なAUVを親機とした複数AUVによる探査手法
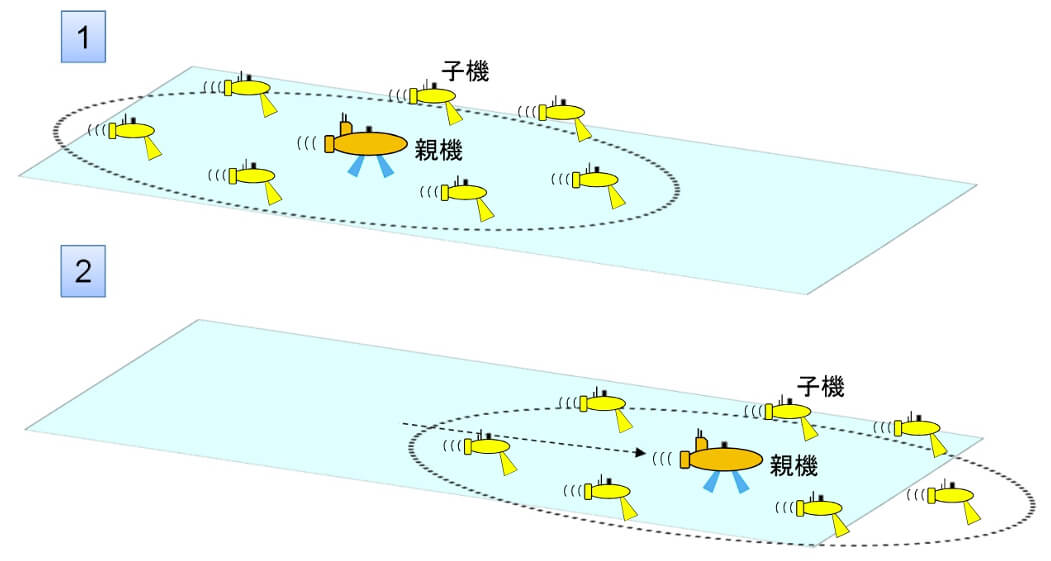
相互ランドマーク測位ではAUVが測位の基準局となるため,最低一台は海底に着底している必要がある.相互ランドマーク測位の改良型として,一台の高性能な測位性能を有したAUV(親機)を基準とした複数AUVによる測位手法を開発した5).親機は慣性航法装置(INS:Inertial Navigation System)やDVLなどを搭載し,支援船などの外部からの支援を受けずに位置や姿勢を推定することができる.親機との音響相対測位に基づき,親機以外のAUV(子機)は親機基準で位置や姿勢を推定する.子機単体では高い測位性能を有していない場合にも,親機との相対測位により,親機と同等の精度で海底を観測することが可能である.また親機を中心に群として移動することで,効率的に観測範囲を拡大していくことが可能である(図7).本手法の利点として,(1)子機がシンプルなセンサで構成されるため,コスト低減が可能である点,(2)子機の小型化によって展開が容易になるため,多くのAUVを同時に展開することが可能となり,調査効率の向上が見込める点などが挙げられる.
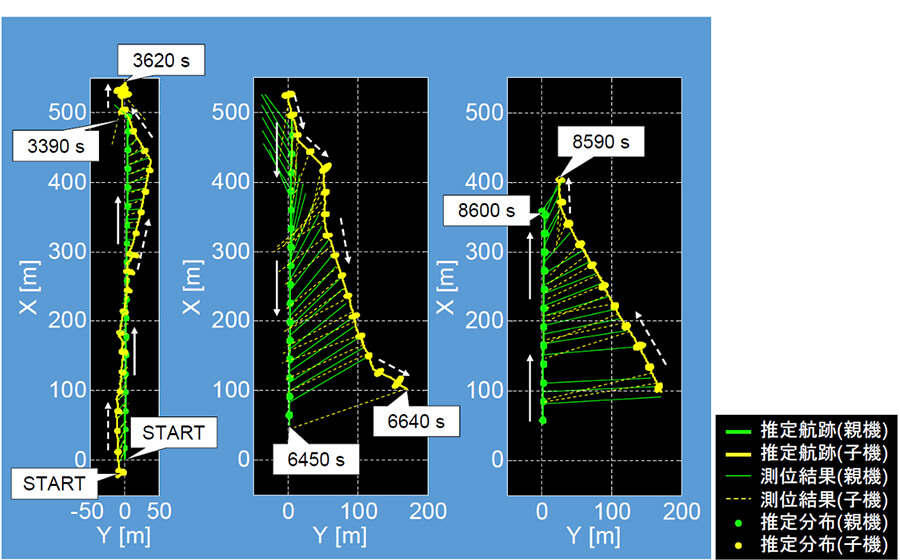
鹿児島湾において二台のホバリング型AUV(親機と子機)を用いた実海域試験を実施した.二台は親機の海底到着位置を原点とした南向きをX軸とする座標系において探査を実施した.図8に二台の推定航跡と音響相対測位結果(親機:緑,子機:黄),また二台の推定位置の確率分布(3分間隔)を示す.親機が音響相対測位で計測した子機との距離と計測時の二台の推定位置から計算した距離を比較して推定誤差を評価した.距離の誤差は調査時間を通じて数m以内で拡大することなく,子機は親機と同等の測位精度で自己位置を推定できることが示されている.
4.おわりに
本稿では海中探査プラットフォームとして注目されているAUVの中でもホバリング型AUVについて述べた.ホバリング型AUVは海底に接近できるため,海底環境のマッピングに適している.水中では陸上のように電波が使用できず,AUVは航法センサによって位置や姿勢を推定する.しかし,航法センサには計測誤差が含まれるため,時間とともに推定誤差が増加する課題がある.この課題を克服するために複数のプラットフォームの連携によって位置や姿勢を推定しつつ広範囲にわたる海底環境を探査する方法を開発してきた.開発した技術によって,海底に接近できるホバリング型AUVの利点を活かし,海底環境の可視化を促進させたいと考えている.
参考文献
- T. Matsuda, T. Maki, Y. Sato, T. Sakamaki, and T. Ura, “Alternating landmark navigation of multiple AUVs for wide seafloor survey: Field experiment and performance verification,” Journal of Field Robotics, vol.35, no.3, pp.359–395, 2018.
- T. Matsuda, T. Maki, Y. Sato, and T. Sakamaki, “Experimental Evaluation of Accuracy and Efficiency of Alternating Landmark Navigation by Multiple AUVs,” IEEE Journal of Oceanic Engineering, 43(2), pp.288-310, 2018.
- T. Matsuda, K. Fujita, Y. Hamamatsu, T. Sakamaki, and T. Maki, “Parent–child-based navigation method of multiple autonomous underwater vehicles for an underwater self-completed survey,” Journal of Field Robotics, vol.39, no.2, pp.89–106, 2022.
【著者紹介】
松田 匠未(まつだ たくみ)
明治大学理工学部 専任講師
■略歴
- 2012年3月東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 修士課程修了 修士(環境学)
- 2015年3月東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 博士課程修了 博士(環境学)
- 2015年4月~2019年3月東京大学生産技術研究所 特任研究員
- 2019年4月~2020年3月東京大学生産技術研究所 特任助教
- 2020年4月~現在東京大学生産技術研究所 協力研究員
- 2020年4月~2021年9月明治大学理工学部 助教を経て2021年9月より現職
■所属学会
- IEEE OES,日本船舶海洋工学会,海洋調査技術学会,日本ロボット学会
■受賞歴
- 2020年海洋調査技術学会 第32回研究成果発表会 若手優秀発表賞
- 2021年海のフロンティアを拓く岡村健二賞
- 2022年日本ロボット学会 第37回研究奨励賞
■専門分野
- 知能ロボティクス,フィールドロボティクス,自律型海中ロボット(AUV),マルチロボットシステム