
マイクロデバイス事業部
中仙道 和之
1. 加速度センサーとは
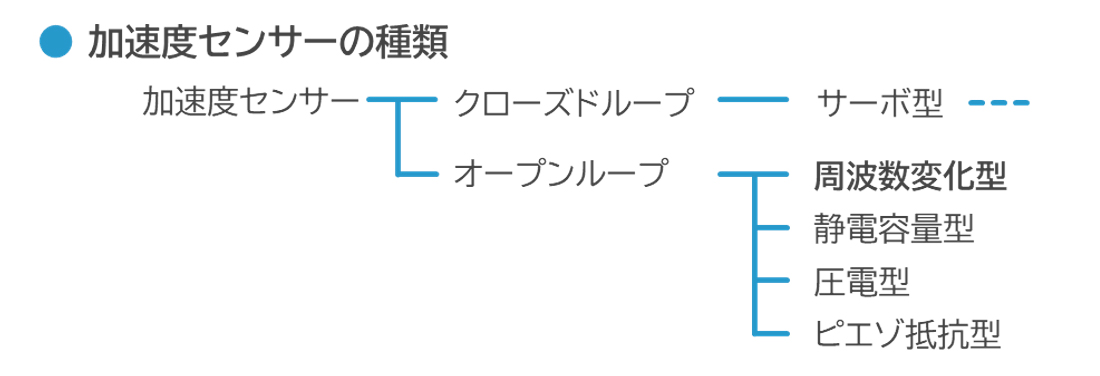
加速度センサーとは、基本的な物理量単位である加速度を計測するためのセンサーです。加速度センサーには多くの種類があり様々な用途で使われています。用途に応じて振動や衝撃を計測するのに適した方式や、傾斜やゆっくりした動きを計測するのに適した方式などがあります。表1に加速度センサーの検出方式による分類を示します。加速度センサーには、加速度によって発生する力を直接的に検出するオープンループ型と、何らかの方法でフィードバックをかけて間接的に検出するクローズドループ型があります。一般にクローズドループ型は、高感度であり微小にゆっくり変化する加速度を計測するのに適した方式です。構造が複雑で熟練者による調整などが必要なため生産性は高くなく、高価格の商品が多い傾向があります。オープンループ型は、低感度で大きく早く変化する加速度を検出するのに適した方式です。構造がシンプルで小型なため大量に生産可能で低価格の商品が多い傾向があります。更に検出原理が異なる様々な方式がオープンループ型にはあります。圧電型とピエゾ抵抗型は、印可された加速度をピエゾ抵抗や圧電材料が発生する電荷の変化として直接捉える方式です。衝突による非常に大きな衝撃や非常に高い周波数の振動を計測するのに適しています。加速度の計測範囲は、数100G~数1,000G、周波数範囲は、数10Hz~数10kHzとなります。静電容量型は、バネ構造を有する稼働可能な電極と固定された電極で構成され、印可された加速度を電極間の静電容量の変化として捉える方式です。近年、MEMS(Micro Electro Mechanical system)と呼ばれる超小型の機械構造を高度に集積した小型、高性能な方式が実用化され、大量生産可能で価格も安価であるため自動車や民生機器に広く普及しています。周波数変化型は、印可された加速度を周波数の変化として捉える方式です。他の方式にはない優れた特徴を有しています。しかし、これまで周波数検出などに技術的な課題があり、軍事用途などの特殊な領域での活用に留まっていました。
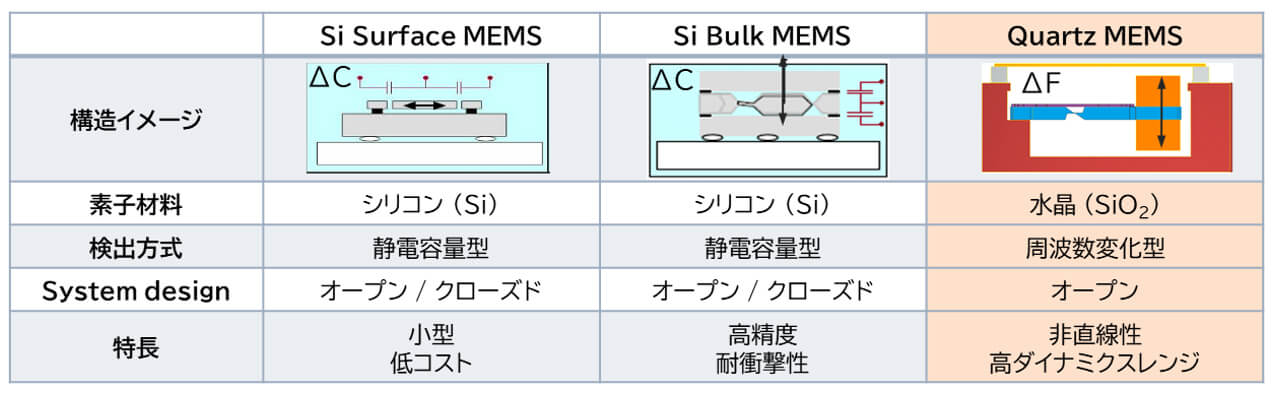
次に、小型で高性能な加速度センサーを大量かつ安価に生産可能なMEMS方式について主な構造原理と特徴を表2に示します。現在、広く普及しているのは、表面MEMS型とバルクMEMS型となります。どちらの方式も、材料は半導体デバイスに使われているシリコンで検出方式は静電容量型です。静電容量型は、原理的に固定電極と稼働電極のギャップを広くすることが出来ません。ギャップ距離は一般的に数μmと狭く、検出できる加速度の計測範囲と分解能の関係はトレードオフとなります。一方、水晶MEMS型は、静電容量型のようなトレードオフはなく、非常に広い計測レンジと高い分解能を両立する事ができます。セイコーエプソンでは、クオーツ時計で培った水晶振動子の設計及び製造技術を応用して、これまで実現が困難だった水晶MEMS型センサーの開発に成功しました。本方式は、小型で大量生産可能でありながら、シリコンMEMS型に比べて、広い検出レンジと高い分解能の両立も可能な優れた方式です。
2. 水晶加速度センサーの動作原理と特徴
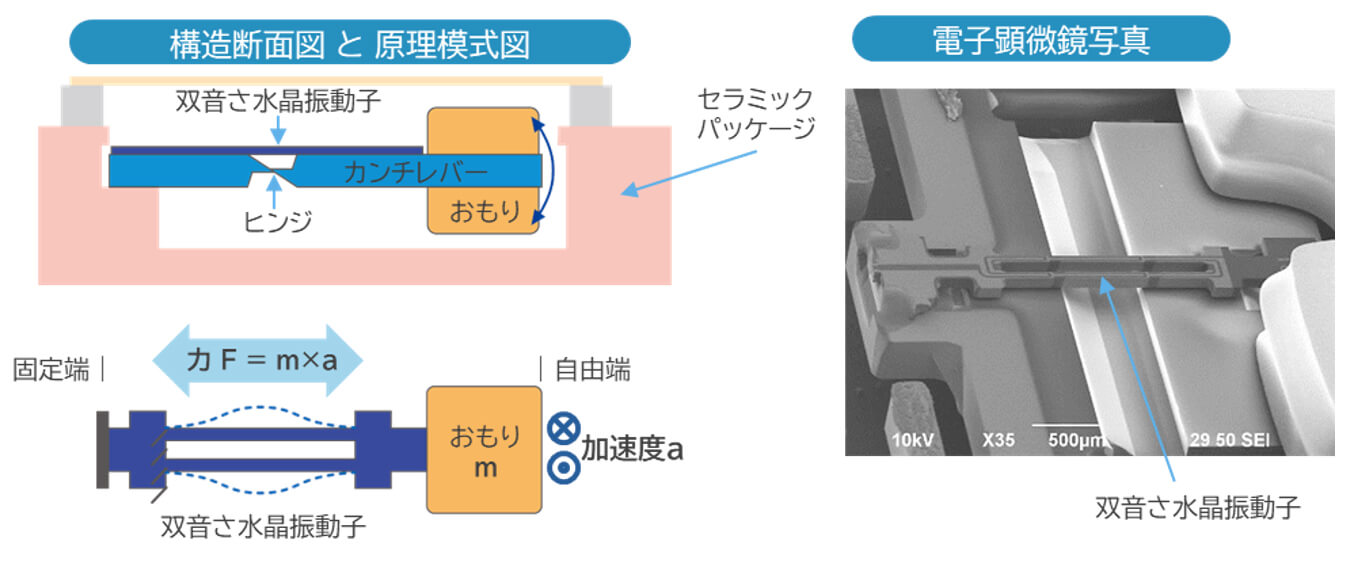
水晶加速度センサーの素子構造と動作原理を図1に示します。基本構造は、双音さ水晶振動子と呼ばれる一定の周波数で振動する構造体の片側を固定端として、反対側におもりを付けた構造になっています。2本の平行に配置された構造は、点線で示す変位方向に機械的な共振を起こします。実際の構造は電子顕微写真に示すように振動するビームの4面に電極が付いており電圧を加えると、水晶の圧電効果で変形が生じ安定した高い精度の周波数で発振します。この構造体に図中に示す方向に力が加わると振動子に圧縮や引っ張りの力が加わります。振動子が圧縮されると双音さ振動子の周波数は低くなります。反対に引っ張りの力が加わると振動子の周波数は高くなります。ちょうどギターの弦を緩めると音が低くなり、強く張ると音が高くなるのと同じ原理です。センサー素子構造は、双音さ振動子に力を効率的に伝達するためにカンチレバーと錘を貼り合わせて一体とした構造になっています。双音さ振動子とカンチレバーの材料は水晶です。更に、振動の共振Q値を高くして周波数の安定度を高めるために、セラミックパッケージで真空封止した構造になっています。
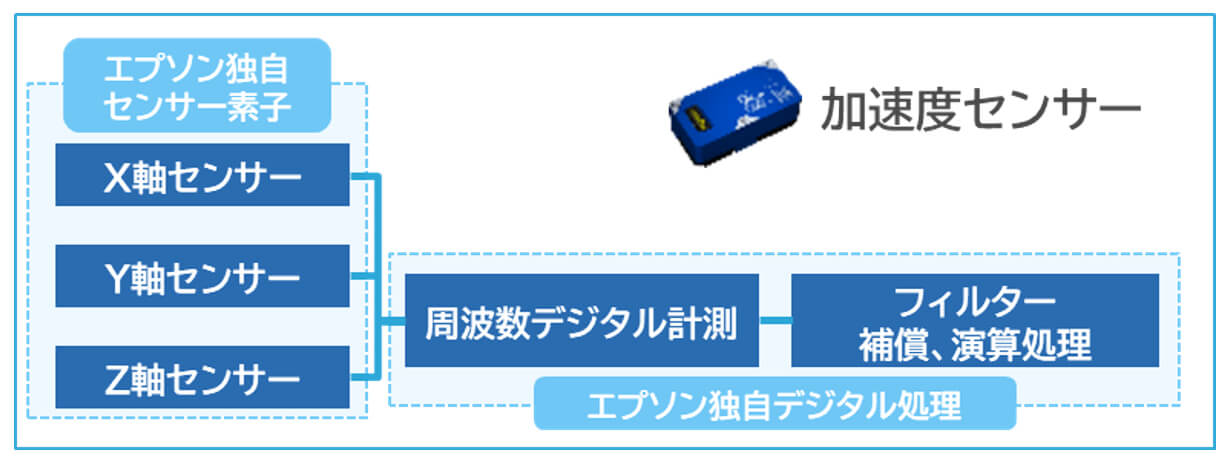
次に、3軸デジタル加速度センサーの機能ブロックを図2に示します。前述の印可される加速度の大きさに応じて出力される周波数が変化するセンサー素子は、1軸方向だけに加速度感度があります。従って3軸機能を実現するために、X軸、Y軸、Z軸に対応する3個のセンサー素子を搭載しています。センサー素子から出力される周波数は120kHz程度で軸間の干渉を回避するため各軸の周波数は数100Hz異なっています。後段には、各軸センサーから出力される周波数をカウントする周波数デジタル計測ブロックと単位変換や各種の補正処理を行う演算処理ブロックで構成されます。特徴は、アナログ要素が極限まで少ない技術アーキテクチャとなっており、電磁ノイズなどが大きな環境でも安定した計測を可能とします[1]。その他にも、以下に示す特徴があります。
■低ノイズで高安定、広い検出レンジ
○ 双音さ水晶振動子を開発することで、低ノイズで高安定な性能を実現
○ 周波数変化型の加速度センサーを開発することで、広い検出レンジと高分解能を実現
■3軸デジタルで高感度なのに使いやすい
○ 独自のアナログ回路を極限まで排除した周波数デジタル計測IPを開発
○ 利便性の高いフィルタ補償・演算処理機能を開発
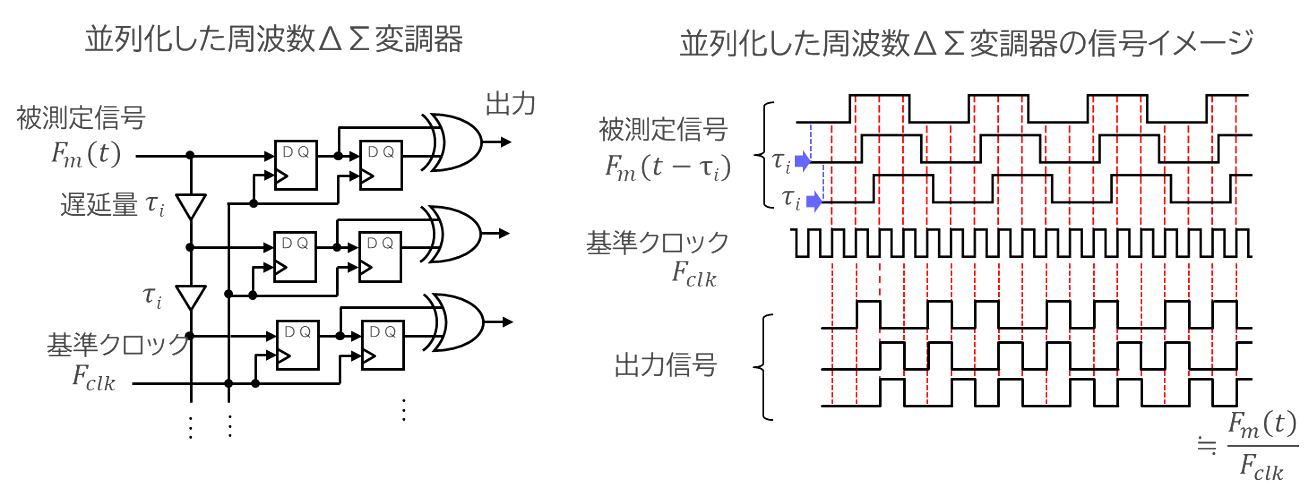
優れた特徴を持つ水晶加速度センサーですが、従来の周波数をカウントする技術には課題がありました。それは、高い分解能を得るには基準クロックを高速化する必要があり、消費電力が大きくなるという課題でした。これを解決するために、我々は並列周波数ΔΣ変調器(FDSMs:Frequency Delta Sigma Modulators)を考案しました[1]。図3に並列化したFDSMsのブロック図と信号イメージを示します。並列化されたFDSMsにより被測定信号を微小に遅延させることで、量子化誤差の低減と高速化を両立しています。本技術により、基準クロックが数10MHz程度でも、十分に高い分解能を得る事が出来るようなりました。
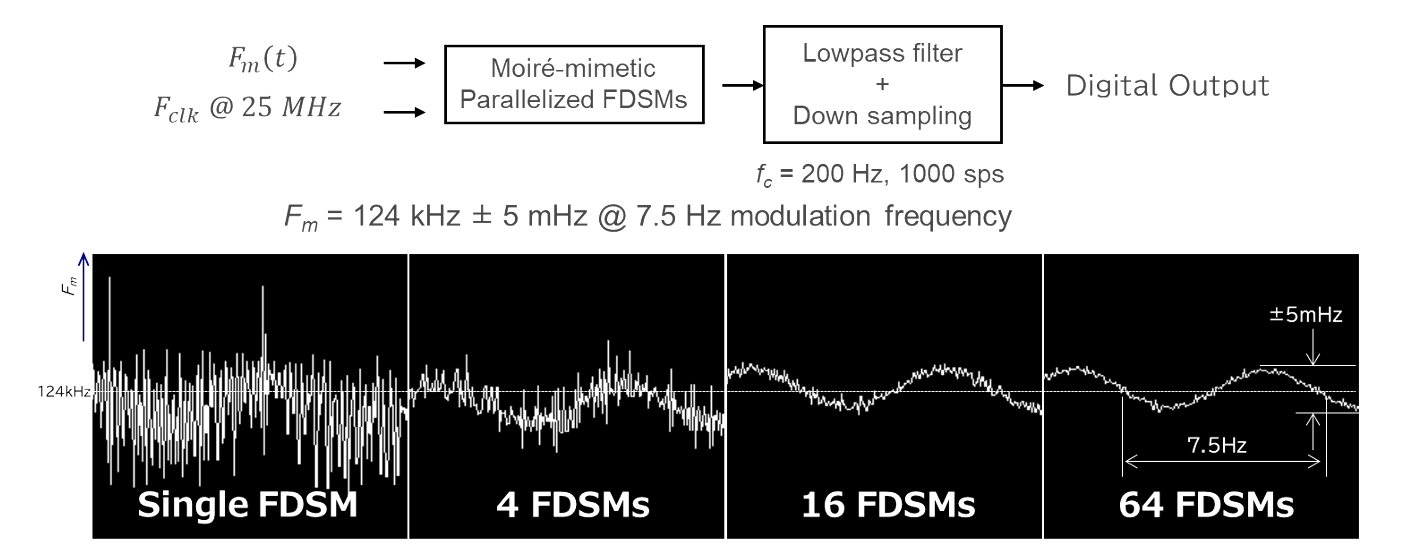
実際に並列化の効果を実験で確かめた例を図4に示します。実験では、基準クロック25MHzで、被測定信号124kHz±5mHzに7.5Hzの変調をかけた信号を入力し、並列数を変えてノイズの低減効果を確認しました。後段のローパスフィルタとダウンサンプリングの条件は一定としました。その結果、並列数の増加に伴ってノイズが少なくなって周波数計測分解能が向上してることがわかります。本技術により、低速の基準クロックでも量子化誤差が少なく高速に周波数を計測できるため、水晶加速度センサーの低消費電力化が可能となりました。
前述の独自に開発した技術により製品化した水晶加速度センサーのラインナップを表3に示します。すべてデジタル3軸で静止状態の重力加速度から、最大1,000Hzまでの振動を計測可能です。用途に応じて小型の組込みタイプとIP67防塵防水タイプを選択することができます。

次回に続く-
参考資料
- M.Todorokihara,“A resonant frequency shift quartz accelerometer with 1st order frequency ΔΣ modulators for a high performance MEMS IMU,” DGON Inertial Sensors and Systems,2018 September.
【著者紹介】
中仙道 和之(なかせんどう かずゆき)
セイコーエプソン株式会社 マイクロデバイス事業部 TD商品開発部 課長
■略歴
- 1995年長岡技術科学大学 電子工学科 修士課程修了
- 1995年東洋通信機株式会社 入社
光通信用光学デバイスの開発設計に従事 - 2007年セイコーエプソン株式会社 入社
水晶センサーの開発設計及び、新領域の事業開発に従事 - 2018年MSM推進プロジェクト 企画設計 課長
- 2022年TD商品開発部 課長