
教授 山田 寛喜
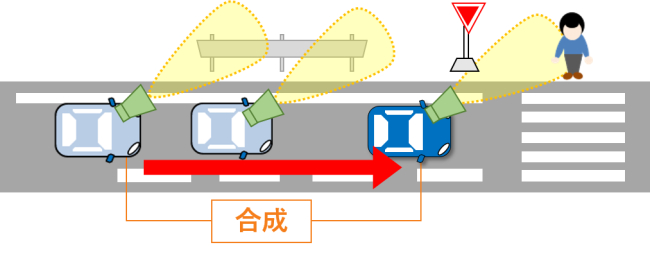
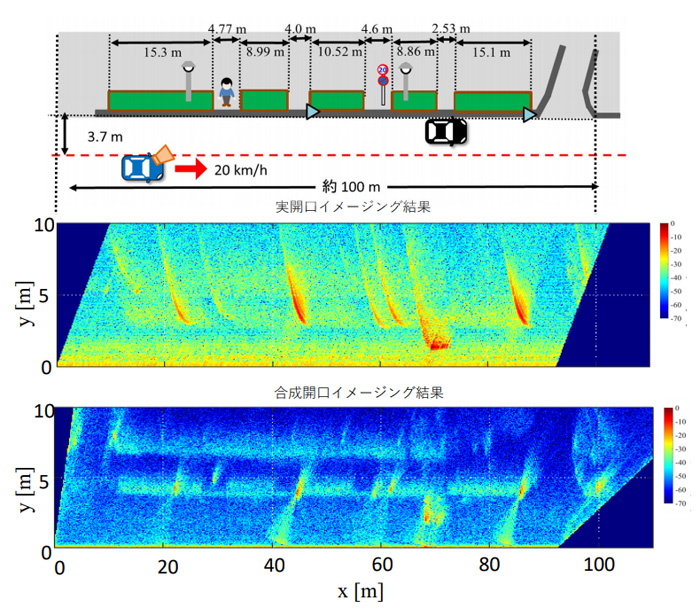
移動するプラットフォームへの応用としては、車載レーダとしての応用であろう。図3のように斜め前方に向けて観測することにより、車両周囲のターゲットまでの単なる距離だけでなく、空間走査するLiDAR同様に空間的な位置の二次元イメージングが可能となる7)。この特徴を利用した車載レーダにおける側方監視への応用例を示す。実験は標準ゲインホーンアンテナを送受アンテナとした76.5GHz(帯域幅500MHz)のミリ波レーダを用い、 側方から45°斜め前方を向け、新潟大学構内を20km/hで走行して実施した。図4の上段が周囲のターゲット配置である。図に示すように歩道上には緑で示した生垣があり、また2つの街頭と道路標識が設置されている。実験に際して人物と自動車を配置し、さらに参照ターゲットとしてコーナーリフレクタ(図中の三角マーク)を2つ設置した。中段の図は、合成開口を行っていない実開口イメージング結果である。これは単にレーダにより得られた距離推定結果をレーダ視線方向(ここでは斜め45°)に並べたものである。同図から分かるようにターゲット位置に強い応答が表れるが、送受信アンテナの素子指向性のため、それらの応答は空間的に広く分布しターゲット位置が不明確といえる。下段が合成開口処理を施した結果である。合成開口処理による空間分解能改善効果に伴い、より明瞭な二次元イメージングが実現されている。この処理により、ターゲット応答は強調され雑音等のランダム応答は抑圧されるためダイナミックレンジの改善効果も得られる。同画像から分かるように自動車から4m程度の歩道の段差、植え込みの分布も読み取れる。また7m程度の距離に連続的に表れている応答は歩道の奥の植え込みや木々の応答である。
このように単なるSISOレーダシステムにおいても信号処理と併用することにより、より高次元のイメージングを実現することが可能となる。合成開口レーダの空間分解能自体はLiDARに劣るが、非常に鋭いビームでターゲットを探査するLiDARに比べ、面的にビームを照射するレーダはターゲットの見逃しがなく全天候性である点でLiDARの欠点を補完するセンサといえる。また、特徴的ターゲット(ランドマーク)情報が登録されているカーナビゲーションとの併用が可能であれば、それらと照合した自律的な自己位置推定などへの応用も期待できるものといえる。
4.ミリ波レーダと機械学習
ミリ波レーダは波長が短く、ターゲットのわずかな変位に対して、そのレーダ応答の位相が大きく変化する。その時間変動をドップラ周波数として容易に観測することができる。ターゲットに対して一定の制約を施せば、人物の呼吸や心拍の状態をモニタすることも不可能ではない。いわゆるマイクロドップラ周波数の検出である。近年、人物の動作推定などに対して急速に研究が進められている。
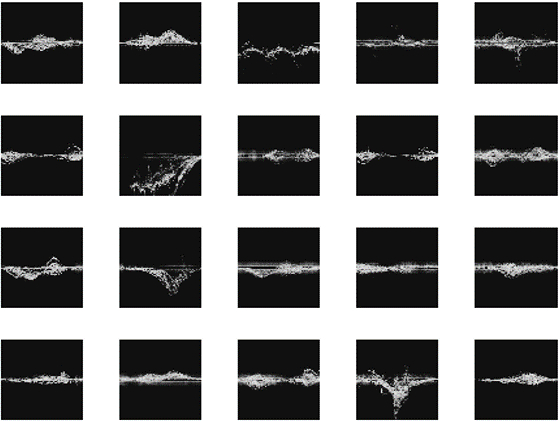
この場合、前述までのMIMOや合成開口レーダのように高分解能なイメージングにより、人物の部位のイメージングを行うのではなく、各部位の動きに伴うドップラ周波数成分の変化を用いた動作識別を目的としている。図5が我々の研究室で実施した実験結果の一例である。これらの図の横軸は時間、縦軸はドップラ周波数であり、ある人物の16個の異なる動作(歩行、椅子に座る・立つ、しゃがむ等)を示したものである。これは単なるSISO(単一送受信)レーダにより得られたものであるが、この時間-ドップラ周波数だけであっても動作に応じて特徴的な応答を示していることがわかる。マイクロドップラの特徴量に関しても動作のスピードや個体差などのため、画一的な指標を示すことは難しく、曖昧さが存在する。この問題点を機械学習により解決しようする研究が近年急速に進められている8)。最近、スマートフォンに実装されたことで話題となったGoogleにおけるProject Soilもレーダ応答に対して機械学習を用いて、マンマシンインターフェースを実現した応用例である。
5.おわりに
ここでは筆者らの研究グループによる研究を通して、信号処理的な観点からMIMOレーダ、合成開口レーダ、マイクロドップラレーダに関して、その特徴を論じた。
ミリ波レーダの急速な発展、低価格化は、今後、様々な分野への応用をもたらすものと期待される。ミリ波レーダ応用においては、光学カメラ、LiDAR、赤外線センサなど他のセンサに対する電波の必要性、優位性を考えることは必須である。ここで示したアプローチにより、分解能に関する問題点は、ある程度解決可能となることがわかるであろう。今後、ミリ波レーダは単なる距離計測だけでなく、イメージングセンサとしての活用も期待できるといえる。さらに機械学習との組み合わせにより、判読が難しいといわれるレーダ画像の応用が容易となり、様々な分野へ応用が広がるものと思われる。柔軟な発想で、多方面への応用が創出されることを期待したい。
参考文献
7) H. Yamada, et al, “High-Resolution 2D SAR Imaging by the Millimeter-Wave Automobile Radar,” Proc. 2017 IEEE Conference on Antenna Measurements & Applications (CAMA2017), Tsukuba, Japan, Dec. 2017.
8) 例えば S. Z. Grurbuz, et al., “Radar-based Human-motion Recognition with Deep Learning,” IEEE Signal Processing Magazine, vol. 36, no,4, pp.16-28, July 2019.
【著者紹介】
山田 寛喜(やまだ ひろよし)
新潟大学工学部工学科 知能情報システムプログラム 教授 工学博士
■略歴
1993年3月 北海道大学大学院博士課程修了、新潟大学工学部情報工学科助手、講師、助教授を経て、
2008年1月より情報工学科(現在、工学科知能情報システムプログラム)教授。現在に至る。
その間、2000年6月~2001年3月、NASAジェット推進研究所客員研究員
2001年4月~2008年3月、国際電気通信基礎研究所(ATR)、客員研究員を併任。