TSV782は現在量産中で、SO-8、MiniSO-8、および同等製品では業界最小クラスとなるDFN8(2 x 2mm)パッケージで提供される。単価は、1000個購入時に約0.62ドルで、STのeStoreから無償サンプルも入手可能。SO-8およびMiniSO-8パッケージで提供される車載グレード対応製品については、2022年末に量産が開始される予定。
David J. Mulla, Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. BIOSYSTEMS ENGINEERING, 114, pp.358-371(2013).
Chunhua Zhang, John M. Kovacs, The application of small unmanned aerial systems for precision agriculture: a review. Precision Agriculture, 13, pp.693-712(2012).
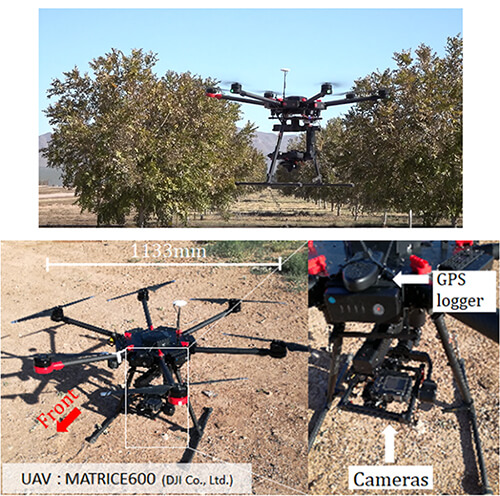
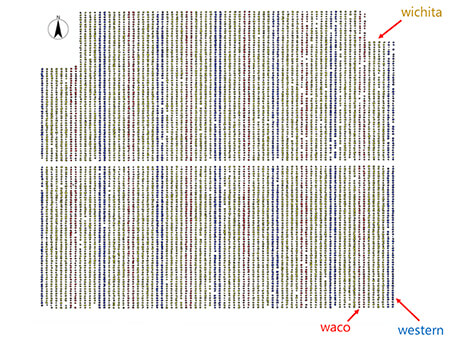
H. Yamagata, K. Noda, J. J. Randall, H. Kamiya, K. Oki, Consecutive monitoring method for pecan orchards and discovery of a mysterious circle in a pecan orchard with UAV .Optical Review, 28 738-744(2021).
Benedetti, R., Rossini, P., On the use of NDVI profles as a tool for agricultural statistics: the case study of wheat yield estimate and forecast in Emilia Romagna. Remote Sens. Environ. 45, 311–326(1993).
Weier, J. and Herring, D.,Measuring Vegetation (NDVI & EVI) Earth Observation. NASA,(2000).https://earthobservatory.nasa.gov/Features/MeasuringVegetation/. Accessed 3 September 2022
Hunt, E.R., Cavigelli, M., Daughtry, C.S.T., McMurtrey, J.E., Walthall, C.L., Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 6, 359–378 (2005).
Swain, K.C., Jayasuriya, H.P.W., Salokhe, V.M., Suitability of low-altitude remote sensing images for estimating nitrogen treatment variations in rice cropping for precision agriculture adoption. J. Appl. Remote Sens. 1, 013547 (2007).
■略歴
1997年筑波大学大学院社会工学研究科博士課程修了後、国立環境研究所、群馬大学工学部、東京大学大学院農学生命科学研究科、東京大学生産技術研究所と異動し、現在、京都先端科学大学工学部および東京大学生産技術研究所に所属している。また、途中、イタリア・イスプラにあるJoint Research Centreへの研究留学や、数年間の内閣府総合科学技術会議へ出向(併任)の経験を持つ。研究では、一貫して環境、農業分野における衛星リモートセンシング手法の開発に従事してきたが、この頃、農業生産者に役立つドローンでのリモートセンシング手法の開発にも興味を持ち、是非、農学と工学の融合による食料生産技術分野の確立に貢献したいと思っている。食料生産技術研究会を運営中。
J. Gubbi, R. Buyya, S. Marusic, and M. Palaniswami, “Internet of Things (IoT): A vision, architectural elements, and future directions,” Future generation computer systems, vol. 29, no. 7, pp.1645–1660, 2013.
I. Lee and K. Lee, “The Internet of Things (IoT): Applications, investments, and challenges for enterprises,” Business Horizons, vol. 58, no. 4, pp. 431–440, 2015.
P. Schulz, M. Matthe, H. Klessig, M. Simsek, G. Fettweis, J. Ansari, S. A. Ashraf, B. Almeroth, J. Voigt, I. Riedel, A. Puschmann, A. Mitschele-Thiel, M. Muller, T. Elste, and M. Windisch, “Latency critical IoT applications in 5G: Perspective on the design of radio interface and network architecture,” IEEE Communications Magazine, vol. 55, no. 2, pp. 70–78, 2017.
N. H. Motlagh, M. Bagaa, and T. Taleb, “UAV-based IoT platform: A crowd surveillance use case,” IEEE Communications Magazine, vol. 55, no. 2, pp. 128–134, 2017.
A. D. Boursianis, M. S. Papadopoulou, P. Diamantoulakis, A. Liopa-Tsakalidi, P. Barouchas, G. Salahas, G. Karagiannidis, S. Wan, and S. K. Goudos, “Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: a comprehensive review,” Internet of Things, p. 100187, 2020.
P. Radoglou-Grammatikis, P. Sarigiannidis, T. Lagkas, and I. Moscholios, “A compilation of UAV applications for precision agriculture,” Computer Networks, vol. 172, p. 107148, 2020.
F. Al-Turjman and S. Alturjman, “5G/IoT-enabled UAVs for multimedia delivery in industry-oriented applications,” Multimedia Tools and Applications, vol. 79, no. 13, pp. 8627–8648, 2020.
M. Erdelj, E. Natalizio, K. R. Chowdhury, and I. F. Akyildiz, “Help from the sky: Leveraging UAVs for disaster management,” IEEE Pervasive Computing, vol. 16, no. 1, pp. 24–32, 2017.
D. Orfanus, E. P. de Freitas, and F. Eliassen, “Self-organization as a supporting paradigm for military UAV relay networks,” IEEE Communications letters, vol. 20, no. 4, pp. 804–807, 2016.
Y. Zhou, G. Gallego, H. Rebecq, L. Kneip, H. Li, and D. Scaramuzza, “Semi-dense 3D reconstruction with a stereo event camera,” Proc. of European Conference on Computer Vision (ECCV), 2018, pp. 235–251.
K. Wackwitz and H. Boedecker, “Safety risk assessment for UAV operation,” Drone Industry Insights, Safe Airspace Integration Project, Part One, Hamburg, Germany, 2015.
“Speed management: a road safety manual for decision-makers and practitioners,” https://apps.who.int/iris/bitstream/handle/10665/43915/9789275317099_por.pdf (Last accessed: 10 Jan. 2022).
E. K. Markakis, K. Karras, A. Sideris, G. Alexiou, and E. Pallis, “Computing, caching, and communication at the edge: The cornerstone for building a versatile 5G ecosystem,” IEEE Communications Magazine, vol. 55, no. 11, pp. 152–157, 2017.
E. Cuervo, A. Balasubramanian, D.-k. Cho, A. Wolman, S. Saroiu, R. Chandra, and P. Bahl, “MAUI: making smartphones last longer with code offload,” Proc. of International Conference on Mobile Systems, Applications, and Services, 2010, pp. 49–62.
S. Kosta, A. Aucinas, P. Hui, R. Mortier, and X. Zhang, “ThinkAir: Dynamic resource allocation and parallel execution in the cloud for mobile code offloading,” Proc. of the IEEE INFOCOM, 2012, pp. 945–953.
P. Mach and Z. Becvar, “Mobile edge computing: A survey on architecture and computation offloading,” IEEE Communications Surveys & Tutorials, vol. 19, no. 3, pp. 1628–1656, 2017.
L. Tong, Y. Li, and W. Gao, “A hierarchical edge cloud architecture for mobile computing,” Proc. of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, 2016, pp. 1–9.
T. Q. Dinh, J. Tang, Q. D. La, and T. Q. Quek, “Offloading in Mobile Edge Computing: Task Allocation and Computational Frequency Scaling,” IEEE Trans. on Communications, vol. 65, no. 8, pp. 3571–3584, 2017.
R. Li, Z. Zhou, X. Chen, and Q. Ling, “Resource price-aware offloading for edge-cloud collaboration: A two-timescale online control approach,” IEEE Trans. on Cloud Computing, 2019.
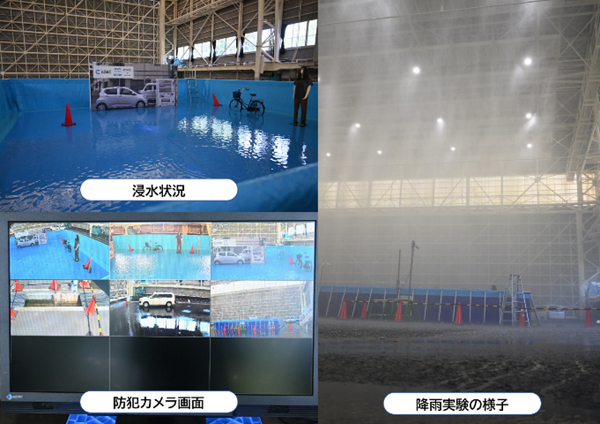
■大型降雨実験施設での実証実験概要〔画像〕
【実施日】 2022年5月19日(木)
【実験内容】 降雨時における防犯カメラ映像のAI解析の検証と教師データの取得と防犯カメラの映り方の確認
① 実験施設内で時間雨量15mmから300mm(※5)までの降雨を発生させ、施設内に設置したプール内の浸水状況をセコムの防犯カメラで撮影してモニタリング。
※5: 日本観測史上最大の時間雨量は153mmで千葉県香取(1999年10月27日)、長崎県永浦岳(1982年7月23日)
② 撮影した映像から対象物を識別して浸水深を解析するAI解析技術の開発をパスコが担当。試作版で検証を実施
③ 応用地質の防災IoTセンサで計測した実際の浸水深データとカメラ映像の解析値の比較検証を実施








![図 1 日本のインフラの老朽化状況 [1]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_01.png)
![図 2 日本の漁業従事者の減少状況 [2]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_02.png)