① サブ課題A「革新的な建設生産プロセスの構築」
建設生産プロセスにおいては、国土交通省のi-Construction等の推進を通じて、ICT 施工等、設計・施工におけるデジタル技術の積極的な活用を進めてきたところであるが、建設現場の飛躍的な生産性・安全性向上を実現するため、施工の「自動化・自律化」に向けた技術開発に官民共同で取り組む。具体的には、建設生産プロセス全体の最適化を実現する自動化・自律化技術として、施工に必要なあらゆるデータをリアルタイムで集積・制御・処理するCPS(Cyber-Physical Systems)と、自動建設機械群による自動施工技術の開発を進める。また、水中・海中、降灰地域など人力では計測困難な箇所でのロボット等によるモニタリング・施工技術や、トンネル坑内などにおける危険作業を自動化・無人化するために必要な測位・通信・制御技術、環境に優れたインフラの建設技術などについて研究開発を行う。併せて国民や利用者にご理解頂くアウトリーチ活動や、大学・高専等の教育機関と連携して高度人材育成を実現する共用可能でオープンな研究開発環境の構築・運用に取り組む。
② サブ課題B「先進的なインフラメンテナンスサイクルの構築」
インフラを健全な状態に保つためには、点検、診断、措置、記録のインフラメンテナンスサイクルを確実に運用していくことが必要である。インフラの損傷メカニズムを踏まえた信頼性の裏付けのある精緻な診断・評価・予測等を行い、予防保全の対応につなげていくことが重要である。このため、構造物の変状・予兆を示す把握すべき情報を明らかにするとともに、それらのデータを取得し、数値解析技術等を用いて、将来の劣化・損傷リスク、性能低下の程度を評価・予測し、精緻な診断により適切な補修・補強等を可能とする。さらに、これらの一連のサイクルを、インフラデータの共通基盤やデジタルツイン技術と連携してハイサイクル化することにより、維持管理プロセスのイノベーションの加速化を促し革新的な維持管理を実現する。補修・補強(措置)の段階においては3Dプリンティング技術や高機能・高耐久材料などを用いた工法の高度化を図る。これらに併せてメンテナンスに関する諸技術の有用性を国民や利用者が理解するためのアウトリーチ活動や、革新的な点検・診断・措置・記録技術を使いこなす人材育成・体制の整備を進める。
③ サブ課題C「地方自治体等のヒューマンリソースの戦略的活用」
地方自治体所管のインフラの必要な機能とサービス水準を適切に維持していくため、総合的なインフラ維持管理のためのデータ活用の取組みとして、自治体職員の担い手確保のための教育環境のプラットフォームの整備など、地方自治体等のヒューマンリソースを最大限に活用するための人材育成の体制構築を図る。また、自治体職員の維持管理対応を効率化する現場で使いやすい技術開発、普及、活用の促進を、スタートアップを含む地方の中小企業と地方自治体との連携によって行う。また、地方自治体がインフラの維持管理に必要な知見や先進事例の共有を行う仕組みや、地方公共団体と地域の大学、高専が連携して人材育成を行う仕組みの構築を進めるとともに、インフラメンテナンス技術の有用性について国民の理解と参加を促進するアウトリーチ活動を行う。これらにより、全国レベルの共通基盤で多様なスキルを持つ人材の参入やリカレント、リスキリングを促進することで、労働力不足の解消と技術・技能レベルの質的向上を実現し、地方インフラの機能とサービス水準の確保に必要なヒューマンリソースの活用を可能にする。
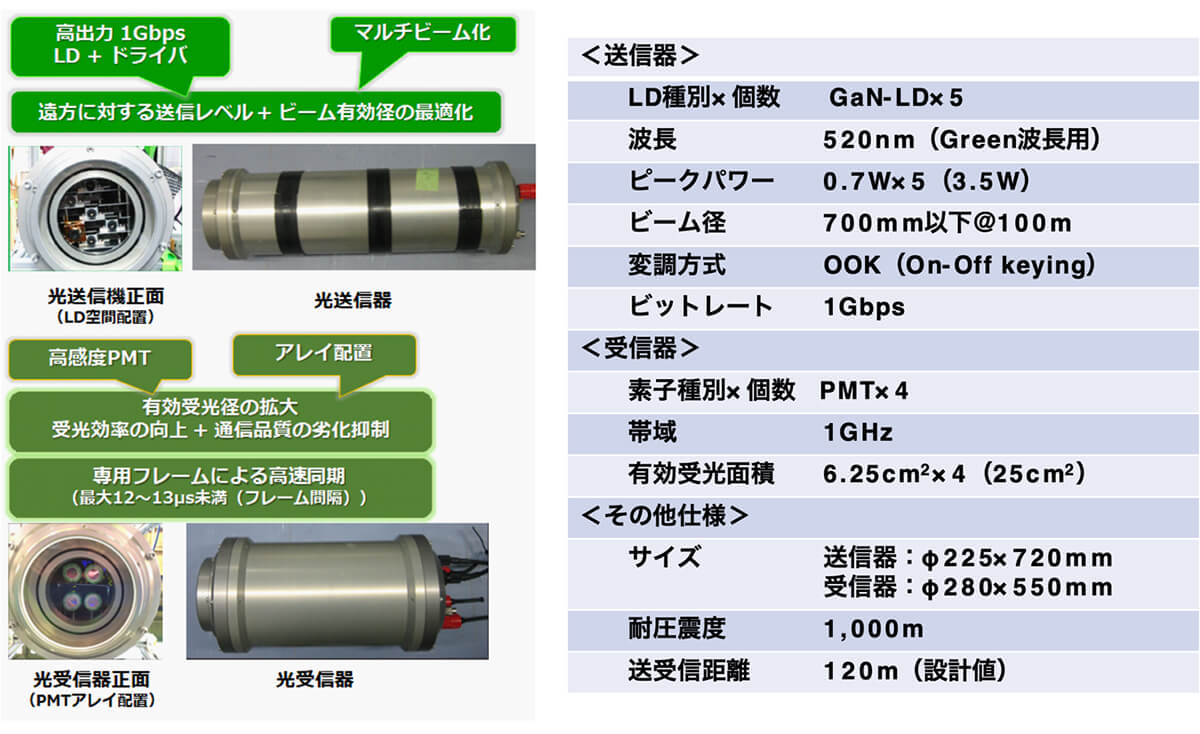
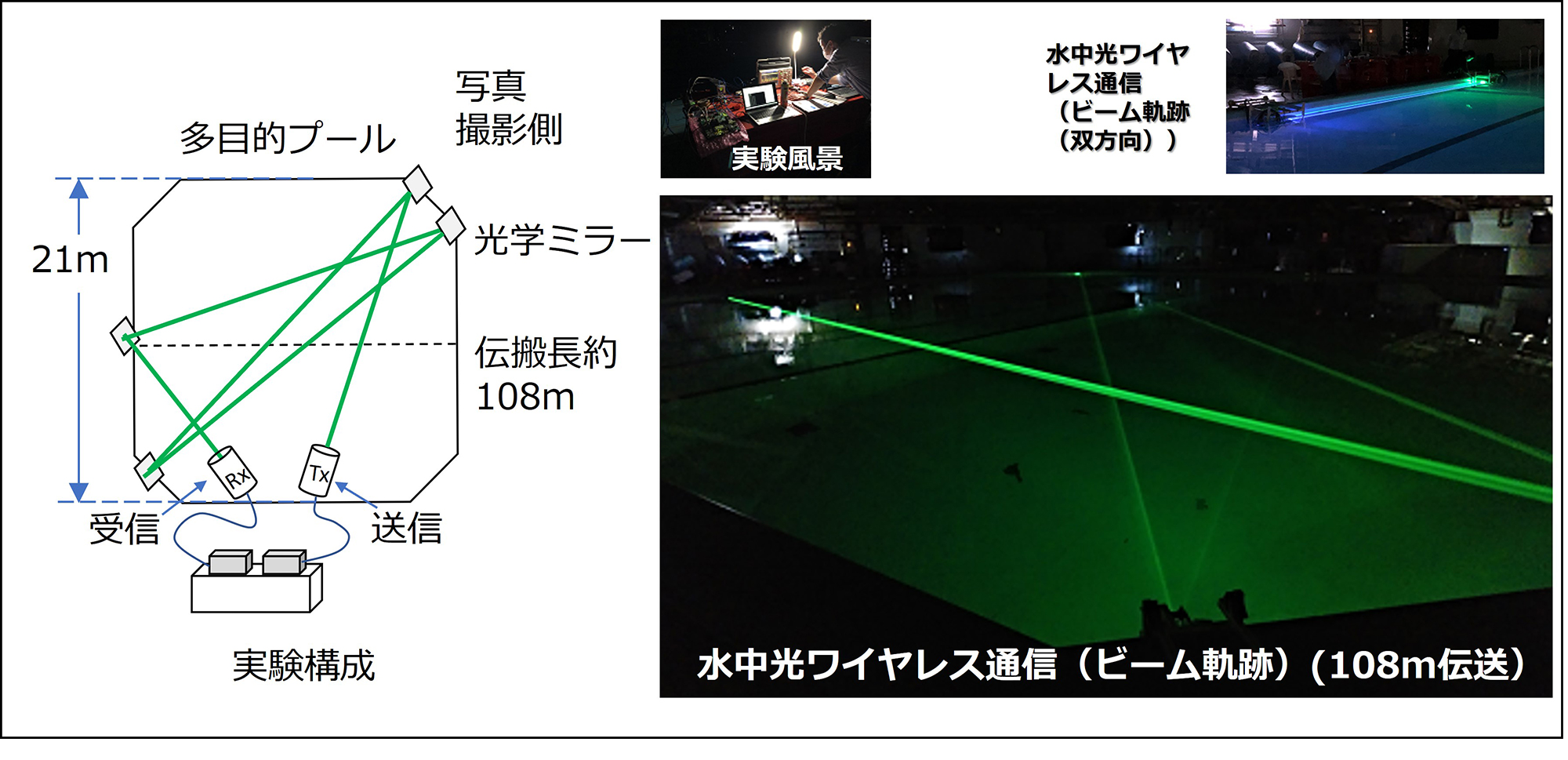
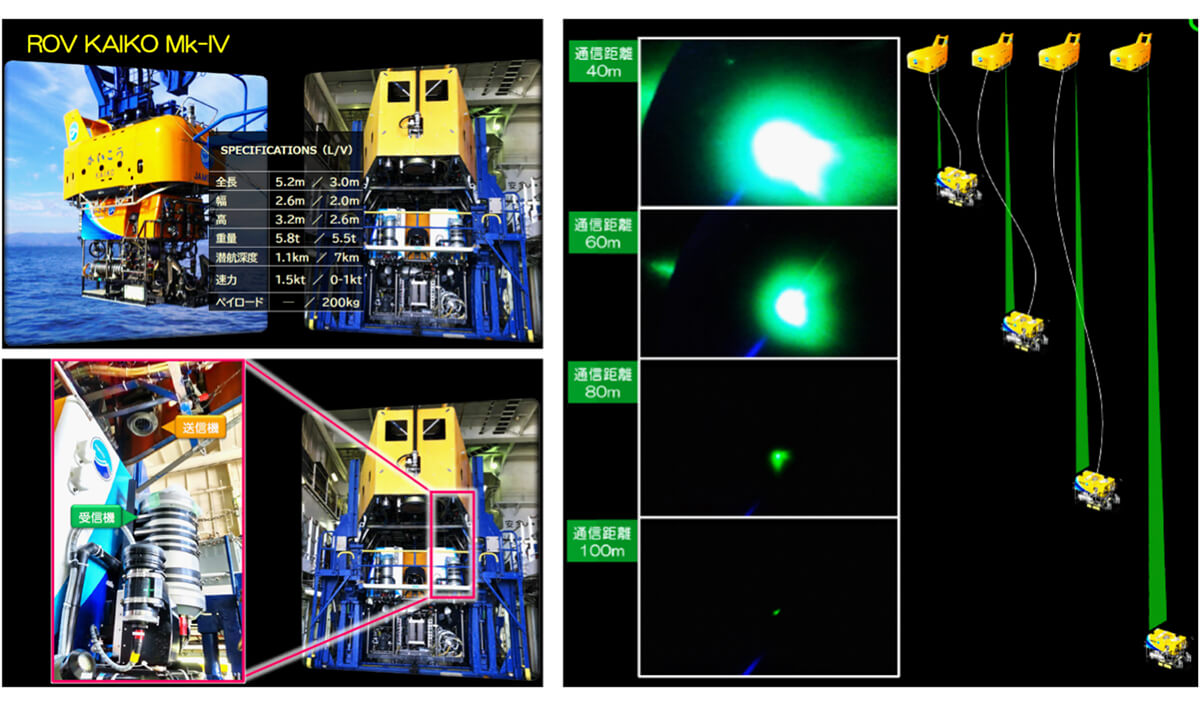
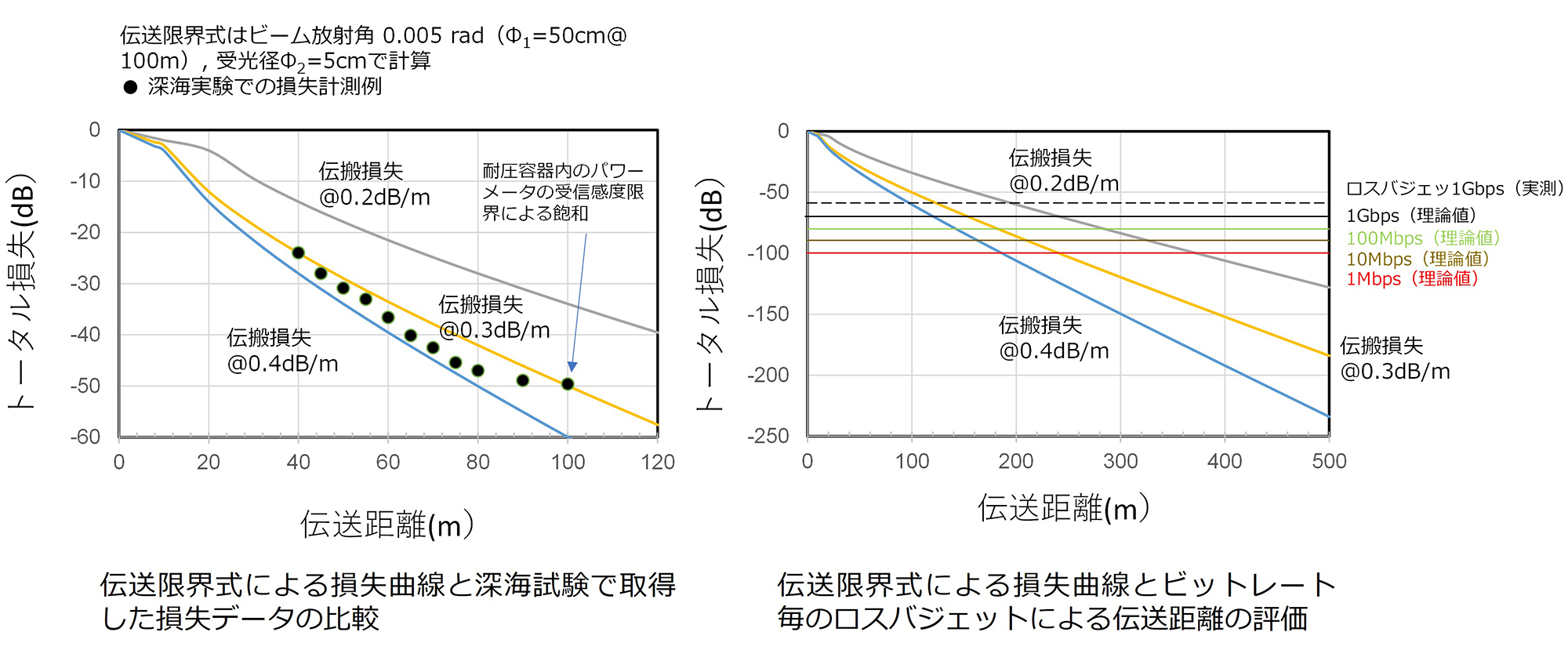
Ken-Ichi Suzuki, Hiroki Okuzawa, Seigo Takahashi, Shojiro Ishibashi, “Long-distance and High-speed Underwater Optical Wireless Communication System ~Challenge to 1Gbps x 100m underwater optical wireless communication~”, URSI GASS 2023, paper D02-2-1, August 2023.
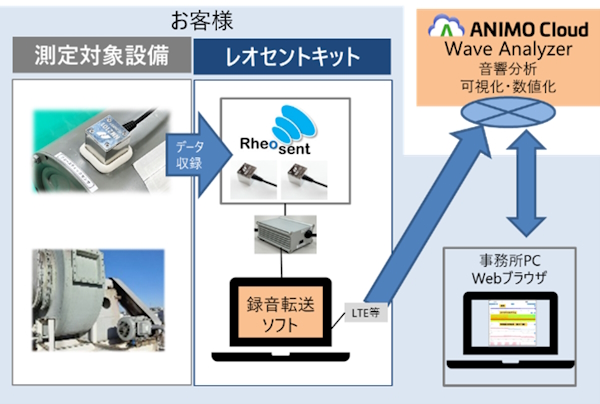
このたび、日清紡マイクロデバイスが誇る最先端の音響センサと振動センサを活用して超広帯域な音響や振動を自動的に収録し、アニモによるクラウドで分析する仕組みをパッケージ化した「レオセントキット powered by ANIMO Cloud」(以下レオセントキット)の開発に成功した。音(音響)データからその音響特徴量を分析、可視化することで、人の聴覚に依存しない異音検知や設備予兆保全、検査業務の省人化等を実現する。まずは、生産設備等の回転機器から発生する初期の超音波の異音を検知し、機器故障の早期発見につながる仕組みを広く体験してもらうため、SOMPOリスクを窓口としてレオセントキットの「トライアル実証評価サービス」を2024年9月から提供開始する。
2.「レオセントキット powered by ANIMO Cloud」の概要(画像)
日清紡マイクロデバイスの「アコースティックセンサー(音響センサ)※2」と、A/Dコンバータ※3、PC、モバイルルータなどを、アニモの「ANIMO Cloud ※4」を組み合わせたシステムを使って、これまで検知の難しかった超音波帯域の異常音や騒音環境下における異常音を検知することに成功した。さらに、遠隔サポートをオプションで利用することで、生産設備の無人監視が可能になるという。
現在、日清紡グループにおいて、レオセントキットのアコースティックセンサーをポリッシュ機に取り付け、作業中のワークや機械異常について音響評価をしている。