アキュイティー(株) 代表取締役
5.高精度位置測位システムとしての使用事例
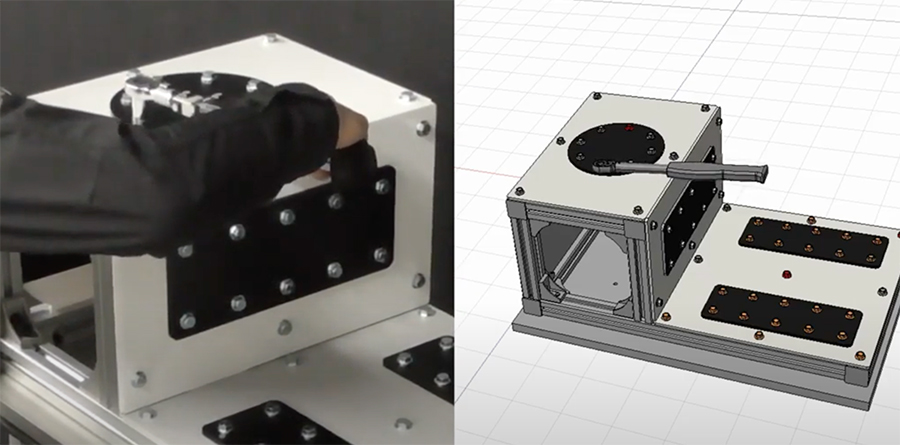
・ドローン
(図:工具の位置測位とCAD図面連携)
6.その他事例
・大型構造物の振動試験
(図:振動試験計測風景)
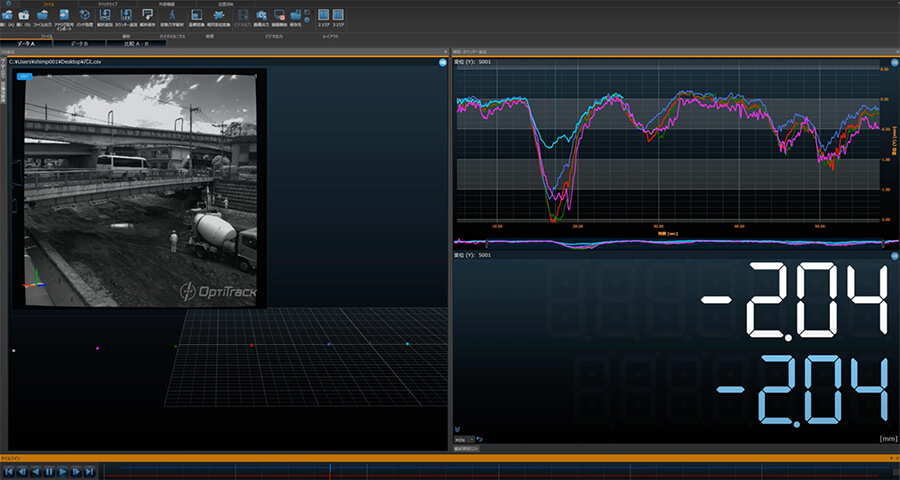
・橋梁のたわみ
(図:橋梁のたわみ計測画面)
・大型搬送機
(図:コンクリートの変形試験)
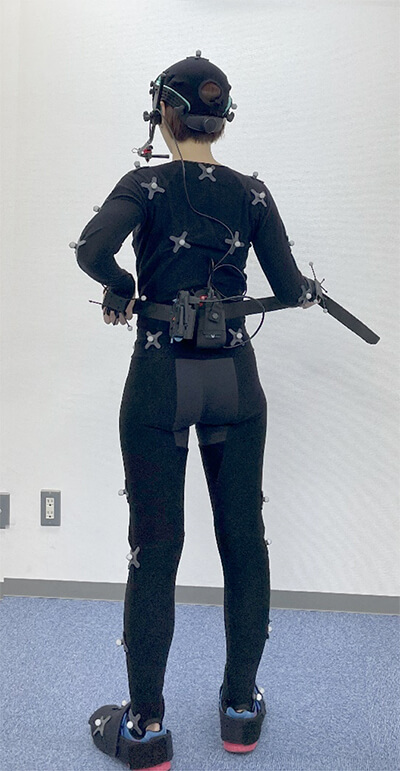
・技術伝承
(図:宮大工の技術伝承に向けた比較画面)
・寸法計測
7.最後に
モーションキャプチャをはじめとしてセンシング技術は、計測原理や計測における各ステップにおける変動要素を整理すると、新たな用途が見つかり進化していく。例えば昨今の画像AIによる認識技術等も同様である。テクノロジーの眼は、人類の発展、安心安全な世の中を実現していくことがまだまだ出来る可能性を秘めている。現実世界の様々な事象や現象をセンサでデジタル化し、AIなどを用いた処理によって有用で価値の高い情報に変換の入り口であるセンシング技術の発展は今後の世の中の進化には欠かすことが出来ない存在によりなっていく。
【著者紹介】 佐藤 眞平(さとう しんぺい)
■略歴
(株)スパイス
3.エンターテイメント分野におけるモーションキャプチャの活用
近年、若者を中心としてバーチャルユーチューバー(Vtuber)が人気を博している。全身のモーションキャプチャに加え、手指や表情までもリアルタイムでキャプチャをしながら、配信している事例もある。またバーチャルプロダクションという分野におけるモーションキャプチャの使用事例も増えてきた。
3.1 全身+指+顔のパフォーマンスキャプチャ
Vtuberはゲームムービーなどのようにアニメーション制作に時間をかけるよりも、配信の頻度を高くしたいという要望が多い。また、指の動きや表情付けをゲームパッド等で専任のオペレータがリアルタイムに操作をする例もあるが、できるだけミニマムのオペレータで運用できるよう全身+指+顔すべてでモーションキャプチャを使用する事例も多い。
図6 全身・指・表情をモーションキャプチャシステムで計測し、CGモデルにリアルタイムで反映させている様子
図7 アクターにはモーションキャプチャスーツを着てもらい、
図8 ヘッドマウントカメラで表情の特徴点をトラッキングする様子
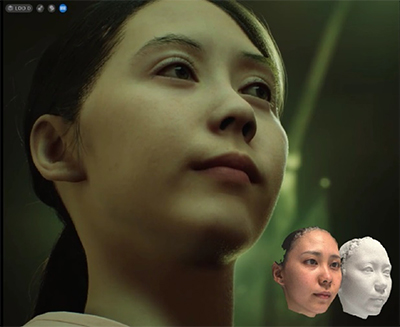
図9 実在する人を3Dアバターにするため、3Dスキャン(Lumio3Dを使用)してCGモデルを作成する様子。
3.2 バーチャルプロダクションでの応用事例
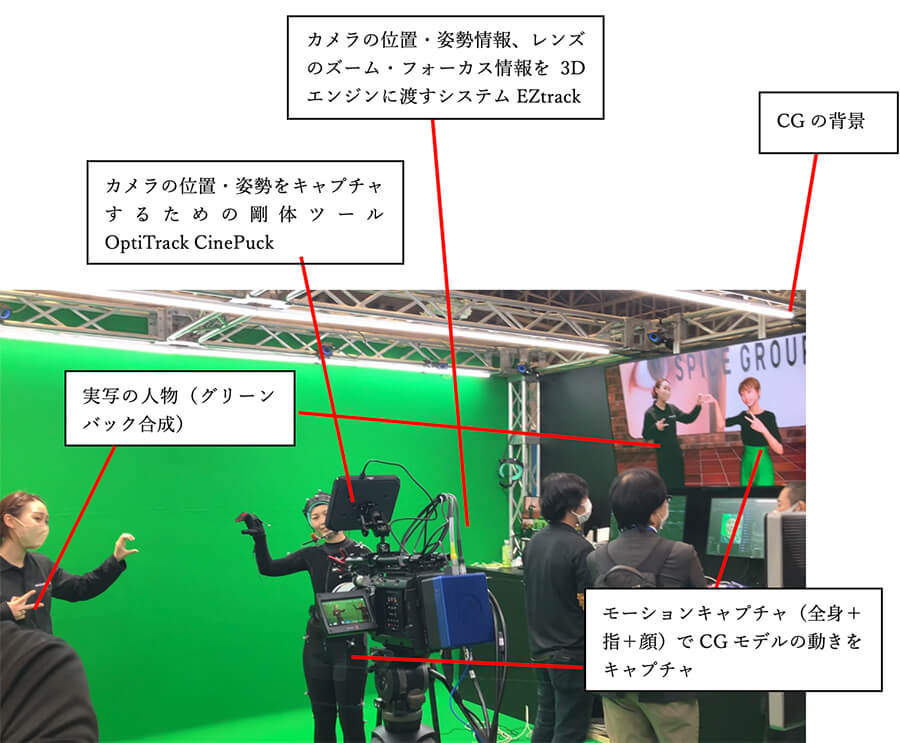
最近注目されているバーチャルプロダクションという分野においてもモーションキャプチャが使用されている。バーチャルプロダクションは、グリーンバックの人物をキーイングにより抜き出し、CGの背景に合成するのだが、カメラの動きもトラッキングしながら、レンズのズーム・フォーカス情報も同時に読み取り、CGの背景と連動させる撮影手法である。ここでカメラのトラッキングにモーションキャプチャが使用される。
図10 モーションキャプチャを使ったバーチャルプロダクションの様子
グリーンバックではなく、LEDパネルを背景に配置し、カメラの動きにあわせてLEDパネルに映し出される背景映像も動かすことでロケーション撮影に行かなくても屋内のスタジオで同等の撮影ができるようになった。
図11 LEDウォールに映し出した背景映像を撮影する事例
4.モーションキャプチャの今後
精度、リアルタイム性、設置や準備の簡便性などモーションキャプチャに求められる要素は多くあるが、すべてを満たしたモーションキャプチャは今のところ存在しないのではないか。しかし、メタバースが注目を集める昨今、お手軽に、精度よく、特別なシステムを使用しなくてもモーションキャプチャができる技術が開発されるのは遠い未来の話ではないかもしれない。実際にAI技術を使用することで、一方向からの映像を用意するだけで、三次元の骨格モデルのデータを取得できる技術も研究開発が進み、現実のものとなってきた。また、米・Meta社のマーク・ザッカーバーグ氏が自社のバーチャルリアリティオンラインビデオゲームHorizon Worldsに登場するアバターに足を追加すると発表したり、ソニーが6つのセンサーとスマホがあればモーションキャプチャができるmocopiを来年販売すると発表したのは記憶に新しいが、リアルタイムにユーザーの全身の動きをバーチャル世界と連動させることができる日がいつ訪れるのか楽しみである。
【著者紹介】 石原 範子(いしはら のりこ)
■略歴
STマイクロエレクトロニクスは、電気自動車(EV)の性能向上と航続距離の延長に貢献する高電力のSiC(炭化ケイ素)パワー・モジュール5製品を発表した。これらの製品は、KIA EV6など複数の車両モデルに使用されている現代自動車社のEVプラットフォーム「E-GMP」に採用されている。https://prtimes.jp/main/html/rd/p/000001281.000001337.html
京成バス(株)、損害保険ジャパン(株)、アイサンテクノロジー(株)、(株)建設技術研究所、埼玉工業大学、(株)東海理化の6社(以下、実施事業者)は、千葉市より公募された、千葉市未来技術等社会実装促進事業の自動運転車社会実装サポート事業(以下、本事業)に採択された。提案した事業計画に基づき、2023年1月21日、22日に幕張新都心地域において自動運転車の実証実験を行うこととなった。https://prtimes.jp/main/html/rd/p/000000080.000050415.html