
イノベーションセンター
センシング研究開発部
竹中 一馬
1. はじめに
ネットゼロエミッションやサーキュラーエコノミーなどの社会課題を解決するため,電力の見える化によるエネルギーの有効利用が求められている。電流センサは,電源・制御回路の評価や,FPGA(Field-programmable Gate Array)等の低電圧デバイスの消費電力量測定などの微小電流測定から,工場における機器の消費電力量測定や保守・保全,モータの電力効率測定,風力発電機や太陽電池の発電量測定などの大電流測定まで,センシング手法として多岐にわたり使用されている。近年では,環境意識の高まりによりハイブリッド自動車(以下,HV)や電気自動車(以下,EV)が世界的に普及している。HVやEVでは,省電力化のためのインバータの高周波化,モータ出力増加による大電流化,およびパワーモジュールの高集積化がなされており,広帯域かつ大電流を測定できる小型の電流センサが望まれている。
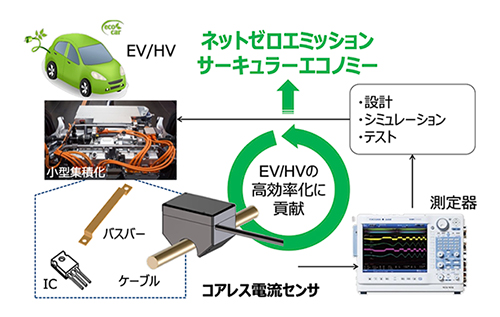
図1に示すように,EVやHVの開発工程や実車テスト時に電池からモータ間の導線に流れる電流を測定できれば,その測定値を設計や制御に反映し,電力の高効率化,つまりエネルギーの有効利用に貢献することができる。磁気コアを用いた従来の電流センサの利点として,①磁気コアにより導線周りに生じる磁界を集磁するため位置依存性が小さい,②磁気コア内で外部磁界がキャンセルされるため外部磁界の影響が小さい,という2点が挙げられる。つまり,磁気コアを用いた従来の電流センサは,取り付け時にセンサと導線の位置関係を考慮する必要がなく,また,外部磁界耐性の高い高精度な電流測定が可能である。一方,大電流測定時には磁気コアを大きくする必要があり,EVやHV車内の電池やモータ付近の密集したエリアにある測定対象導線へのアクセスが容易ではないという課題がある。上記の課題を解決すべく,弊社では,直流から広帯域かつ大電流を測定でき,小型化により測定対象へのアクセスが可能となるコアレス電流センサを開発している。表1に目標スペックを示す。
| 項目 | 目標スペック |
|---|---|
| 対象 | ケーブル(円形断面) |
| 最大電流値 | 1000 Arms |
| 帯域 | DC~10 MHz |
| 精度 | 5% |
| ヘッドサイズ | 35×40×50 mm3 |
磁気コアレス化にあたっての上記2点への対応として,本稿では,①複数の磁気センサを用いて導線位置を推定する位置推定アルゴリズムを用いた電流センサ(1)(3),②外部磁界が磁気センサに及ぼす影響を除去する磁気シールドを用いた電流センサ(2)(3)の2種類について紹介する。
2. 位置推定アルゴリズムを用いた電流センサ
単一の磁気センサを用いてHVやEV内のコンバータ-インバータ間の電流を測定する場合,測定電流(以下,往路電流)が近接する逆向きの電流(以下,復路電流)の磁界の影響を受けるという問題があった。そこで,本開発では,往路および復路電流が流れる平行導線を想定し,複数のデジタル磁気センサを用いて導線位置を推定した上で,往路および復路電流による磁界をそれぞれ分離する位置推定アルゴリズムの開発を行った。また,求められた測定対象ケーブルと磁気センサの距離からアナログ磁気センサの出力を補正した上でアナログ電圧をリアルタイムに出力し,さらには,直流から低周波までの電流測定には磁気センサを,低周波から数MHzの交流測定にはロゴスキーセンサを用いることで,これらの出力を結合する信号処理回路の開発を行った。
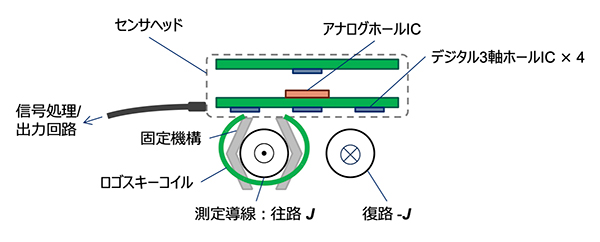
電流センサヘッドの外観図を図2に示す。センサヘッドには4つのデジタル三軸磁気ホールICと1つのアナログ一軸リニアホールICが含まれる。デジタル三軸ホールICには,素子の性質上10 msec程度の遅延があるため波形出力には不向きである。一方,アナログ一軸リニアホールICは,遅延は200 µsec程度と少ないが,一軸であるため磁気ベクトルを測定することができない。そのため,波形出力にはアナログ一軸リニアホールICを用い,補正係数の算出にはデジタル三軸ホールICを用いるハイブリッド構造とした。本構成では,磁気センサは樹脂筐体により覆われた形状になっており,ロゴスキーセンサはセンサヘッドに付属している。センサヘッドをさらに小型にするため,磁気センサとロゴスキーセンサの信号処理はセンサヘッドと切り離した回路部にて行っている。このような構成にすることで,大電流測定が可能で,かつ従来のCT型プローブと比べて体積比として1/8程度の小型化を実現した。
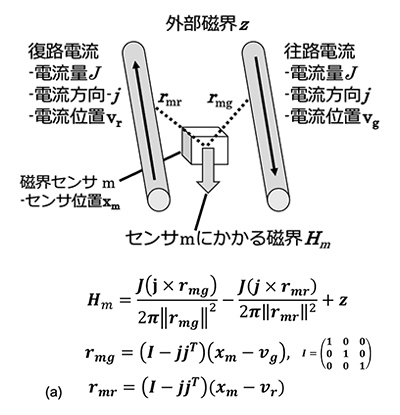
位置推定アルゴリズムは,図3に示すように,例えば電池-インバータ間のように,測定対象である往路電流に対して平行かつ逆向きに復路電流が近接して流れている場合を想定している。そのため,センサには往路電流および復路電流による磁界が合成されて印加されており,センサヘッド内にあるデジタル三軸ホールICには,往路電流と復路電流からそれぞれ生じる往路磁界Hmg(m=1~4)と復路磁界Hmr,それに加えて,電流に依らず均一に作用する背景磁界z が印加される。この時,各磁気センサに加わる磁界Hm は図3のような式で表される。4つのデジタル三軸ホールICから得られた測定磁界ベクトルと予め規定したセンサ位置から,4つの連立式が成立する。電流方向ベクトルと磁界ベクトルが直交しているため,電流に対して垂直となる平面上に導線位置,磁気センサ位置,および磁界ベクトルを射影することができる。このように三次元空間上から二次元平面上に射影することにより,演算の手間を省いて導線位置rmg およびrmr を求めることができる。導線位置rmg およびrmr はデジタル三軸ホールICと導線の位置ベクトルになるため,アナログ一軸リニアホールICと導線間の位置ベクトルに修正して補正係数を算出する。計算の詳細については引用文献(1)を参照いただきたい。
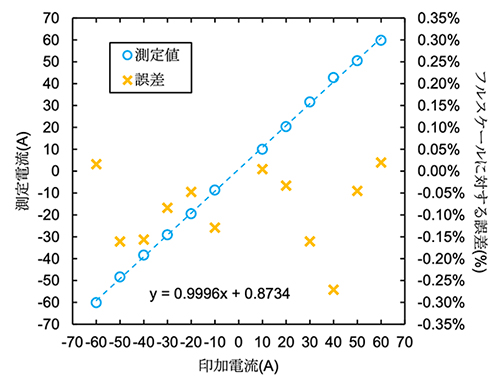
実験の構成図を図4に示す。太さ5 mmの2本のアルミ棒を中心間距離14 mmで平行に配置する。電流源の正極および負極を2本のアルミ棒の片端にそれぞれ取り付け,もう一方の片端を短絡する。センサヘッドを測定導線上に配置し,ロゴスキーコイルは片方の導線をクランプするようにする。参照として,測定導線を電流プローブによりクランプして測定する。本例では,図5および図6に示したデータを除き,図5で算出した補正係数を使用して評価した。電流推定の精度を評価するため,-60~+60 Aまで10 A刻みで印加電流と推定値の誤差を評価した。
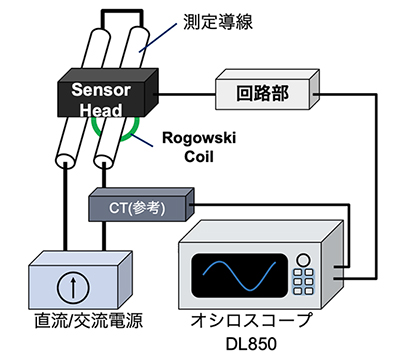
図5に示すように,印加電流と推定電流がほぼリニアになることを確認した。また,誤差=(入力電流値-センサ計測値)/(センサのスパン)と定義し,フルスケール1000 Aに対する誤差は±0.3%以内であることを確認した。誤差要因として,デジタル三軸磁気センサのノイズフロアによる影響が考えられる。
次に,導線とセンサの位置関係による印加電流と推定値の誤差について評価した。センサヘッドが導線の中心になるように配置し,電流を60 Aの直流電流に設定して導線の中心間距離を変えて測定を行ったところ,図6に示すように,推定誤差が±2.5%以内に収まっていることを確認した。導線の中心間距離が14 mmから29.5 mmに変化することにより,磁気センサに加わる合成磁界の計算値は最大で20%程度変動するが,誤差が±2.5%程度に収まっており導線とセンサの位置関係が変化しても位置補正が適切に行われていることが示された。
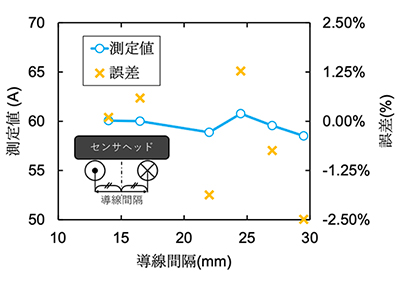
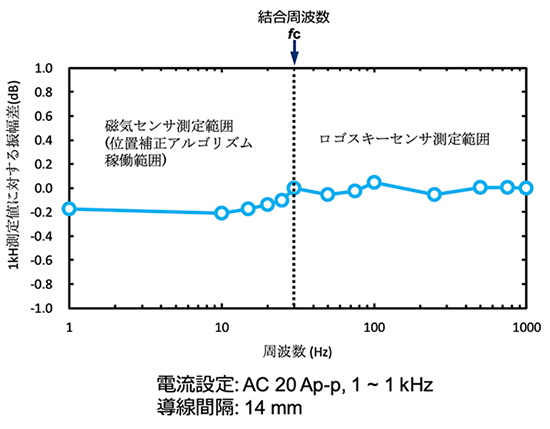
図7に,低周波側測定信号と高周波側測定信号をそれぞれ結合回路にて加算した後の周波数特性の平坦度を評価した結果を示した。振幅を20 Ap-pに固定し,周波数を1 Hzから1 kHzで測定した。1 kHz以上の周波数では,測定信号がロゴスキーセンサの測定信号が支配的になるため省略している。1 kHzの測定値を基準として,約0.2 dBの誤差に収まることを確認した。この程度の誤差は,ロゴスキーセンサと導線の位置のずれによるもので許容範囲内である。
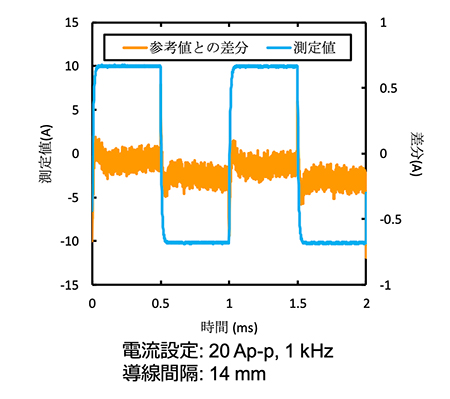
ロゴスキーセンサを単体で使用した矩形波測定では,電流が一定となる平坦部分にてドループ特性(垂下特性,直流に応答せず出力電圧が降下する現象)が見られる。本電流センサを用いて20 Ap-p,1 kHzの矩形波の測定を行ったところ,図8に示すように,測定波形が矩形波の立ち上がりおよび立ち下がりに追従し,ドループ特性が現れておらず,矩形波の波形が再現されていることが確認された。
次回に続く-
参考文献
- 野口直記,小河晃太朗,他,“DC測定可能な広帯域コアレス電流センサ”,日本磁気学会論文特集号,第4巻,1号,2020,p. 27-31
- 寺尾美菜子,小河晃太朗,他,“小型電流センサ用磁気シールドの設計”,第44回日本磁気学会学術講演会概要集,2020,p. 58
- 竹中一馬,寺尾美菜子,他,“大電流および交流/直流の測定が可能な小型コアレス電流センサの要素技術開発”,横河技報,Vol. 65,No. 2,2023,p. 9-14(p. 59-64)
【著者紹介】
竹中 一馬(たけなか かずま)
横河電機株式会社
マーケティング本部 イノベーションセンター
センシング研究開発部
センシングシステムグループ長
■略歴
2004年 東京大学大学院工学系研究科
修士課程修了(機械工学専攻)
2006年 横河電機株式会社 入社
2011年 NMEMS技術研究組合 出向
2015年 横河電機株式会社 帰任 現在に至る
これまでにEV/HV用コアレス電流センサ、磁気分布測定用センサ、単結晶ダイヤモンドを用いた圧力センサ等の研究開発に従事。近年ではCCU(Carbon dioxide Capture and Utilization)やリチウムイオン電池に関連する研究テーマに従事。2015年より東京大学非常勤講師。技術経営修士(MOT)。
光ファイバ電流センサ(1)

フォトニクス技術本部
佐々木 勝
1. はじめに
電力設備における電流計測は、産業や社会の基盤となる設備の制御や監視を行う上で、常に必要となる基本的な技術である。通常これらの電流計測には、鉄心と導体巻線で構成された電磁誘導を原理とする変流器が用いられているが、小型化や絶縁などいくつかの制約が認識されており、制約のない電流計測技術が求められる。
新しい原理の電流センサとして、ファラデー効果を利用したセンサ技術が1960年代に提案され[1]、研究が進められた。当初はガラスブロックなどバルク型のファラデー素子が用いられたが、その後1980年代に光通信技術が進展すると、光ファイバをファラデー素子に用いた研究が行われるようになった[2]。国内外の機関で継続的に行われた研究開発の成果により光ファイバ電流センサの実用化が進んでいる。当社は複数企業の協働によるセンサ技術の開発に参加し[3]、光通信デバイスの技術をもとにセンサヘッドの開発を担当した。
本稿では光ファイバ電流センサの技術解説を行う。はじめにセンサの基本原理、センサの方式、計測の対象を整理する。次に当社で開発したデバイスを例に取り上げ、その構成、動作、特性を述べ、あわせて特長と要素技術を紹介する。次に、国内外における適用の現状について、当社の方式を含めて述べる。最後に今後の技術課題を述べる。
2. 光ファイバ電流センサの基本原理
光ファイバ電流センサの検出原理であるファラデー効果と、それを利用して電流を計測する原理を説明する。
2.1 ファラデー効果
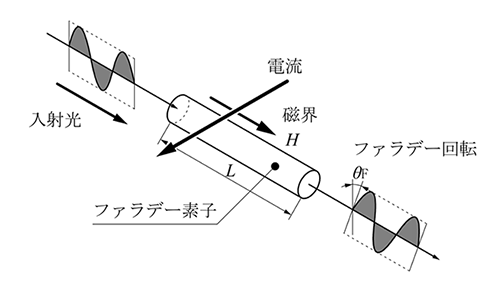
磁界中に置かれた透明媒体に光を通過させると偏波面が回転する。この効果はファラデー効果と呼ばれ、センサの基本原理である[図1]。偏波面の回転角(ファラデー回転角)θ F [rad]は、次式で表される。

ここに、H:磁界の強さ(光の進行方向成分)[A/m]
L:ファラデー素子の長さ [m]
V:ベルデ定数 [rad/A](媒体の種類と光の波長に依存)
式(1)から、ファラデー回転角は透明媒体に印加された磁界の強さに比例する。従って、この媒体をセンサ素子として用い、何らかの方法によってファラデー回転角を知れば、磁界の発生源である電流の大きさを知ることができる。
2.2 センサ素子の種類
- バルク形素子(非磁性体)
上記 図1 ではバルク型素子をセンサ素子としている。具体例にはガラスブロックがあり、研究初期に多くの事例がある[1]。 - バルク形素子(強磁性体)
光アイソレータに利用されているガーネット系結晶はベルデ定数が大きいため高感度なセンサを構成できる。一方、下記について考慮が必要となる。- 強磁性結晶は多磁区構造を有し、磁壁によって透過光は回折する
- 光の伝搬方向と垂直な方向に磁界を印加して単磁区化して利用する場合、磁気複屈折の考慮が必要
- 導波路形素子
導波路形素子として光ファイバ形が実用化されており、本稿の対象である。シングルモードの光ファイバに磁界を印加すると、ファイバ中を伝搬する偏光が、磁界の印加に応じて回転するため、光ファイバをファラデー素子として用いることができる。
2.3 光ファイバ電流センサの方式
ファラデー回転角を電気信号に変換し、最終的に被測定電流に比例する電気信号出力を得る具体的な方法として、強度変調方式と干渉方式について述べる。
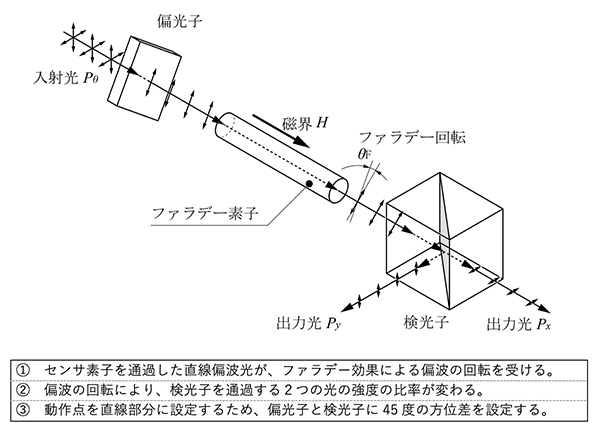
2.3.1 強度変調方式
図2の光学系の構成で、偏光子に対して45°傾けた検光子(偏光プリズム)を配置する。磁界によってファラデー回転が生じると検光子を透過した光強度(Px, Py)が変化するため、受光素子によりファラデー回転に応じた電気信号に変換できる。
この方式では比較的簡素な構成でデバイスを組み立てることができる一方、直流電流については高精度な計測が困難である。
2.3.2 干渉方式
干渉方式は、光ファイバジャイロに用いられているループ型干渉計を応用している[4]。構成について多く提案されているが、図3に一例を示しその動作を説明する。
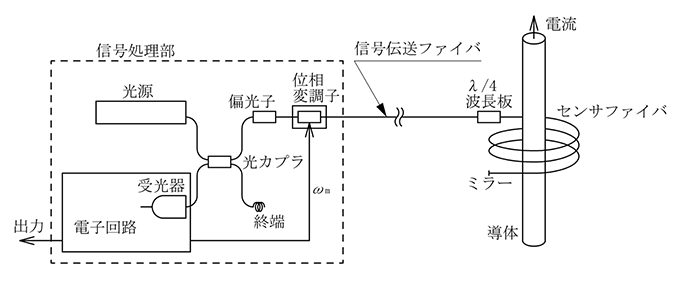
光源を発した光は、光カプラを通過し偏光子で直線偏光となる。光が入射する伝送ファイバは偏波保持形で、偏光子に対して軸を45°傾けており、Slow軸、Fast軸の二つの偏光モードに分かれて伝搬する。この二つの偏光モードは1/4波長板でそれぞれ円偏光に変換されてセンサファイバを伝搬する。センサファイバ端のミラーで折り返す際、偏光モードが交換される(右円偏光→左円偏光、左円→右円)。センサファイバを往復する間に、光は電流が作る磁界によるファラデー効果を受け、二つの偏光モードの間に電流に比例する位相差が生じる。戻ってきた光は再び1/4波長板を透過して入射時と直交する直線偏光に変換され、伝送ファイバ往路をSlow軸で伝搬した成分は復路をFast軸で伝搬し、往路Fast軸成分は復路Slow軸を伝搬する。二つの偏光モードはファイバ端で干渉したのち偏光子に入射して偏光変化に応じた光強度に変換され、光カプラに通過したのち受光素子(フォトダイオード)により電気信号に変換される。
出力の直線性及び安定性を確保するため、位相変調器と組み合わせた信号処理が行われる。受光器の出力を,中心角周波数ω mの帯域フィルタ及び2ω mの帯域フィルタに通し、両者のレベルの比を求める方法(位相敏感検波)などが用いられる。
干渉方式では、光路に位相変調器を挿入することで、受光強度の変化とファラデー効果による位相の変化を区別し補償している。
次回に続く-
参考文献
- S. Saito, et al: IEEE J. Quantum Electronics, Vol.QE-3 No.11 p.589, 1967
- 例えば、A. Rapp and H. Harms: Applied Optics, Vol.19 No.22 p.3729, 1980
- 黒澤, 山口, 佐々木 :レーザー研究, Vol.45 No.1, p.10, 2017
- 例えば、J. Blake et al: IEEE Trans. on Power Delivery, Vol.11, No.1, p.116, 1996
- K. Kurosawa and I. Masuda: Proc. 9th Opt. Fiber Sensors Conf., p.415, 1986
- S. Nasukawa, et al: Proc. 7th JICABLE Conf., Session A.5, No. A5.5, 2007
- 板倉,他:高岳レビュー, Vol.50 No.1, p.10, 2005
- K. Torii, et al: Proc. FISITA-2008, No. F2008-06-050, Germany, 2008
- 宮澤:電気現場技術, Vol.46 No.54 p.29, 2006
- 山口,他:東光高岳技報, Vol.1 No.1 p.44, 2014
- 高橋,他:まぐね, Vol.1 No.3, p.118, 2006
- Y. Hirata, et al: 2012 IEEE/PES, T&D Conf., DOI:10.1109/TDC. 2012. 6281570
- 林屋,他:電気学会論文誌C, No.Vol.126 No.6 p.736, 2006
- K. Bohnert and P. Guggenbach: ABB Review Vol.1, 2005, p.7, 2005
- M. Wiestner, et al: Aluminium 2005-1-2
- 電気学会技術報告 No.1475, 2020.3, ISSN 0919-9195
- OITDA規格:光ファイバ電流センサ, OITDA FS 01, 2017
- IEC規格:Electric Current Measurement-Polarimetric Method, IEC61757-4-3, 2019
- OITDA規格:光ファイバ電圧センサ, OITDA FS 02, 2022
- 因, 武部, 森永:日本セラミックス協会学術論文誌, 111巻,1294号, p.426, 2003
- A. Saitoh, et al: Jpn. J. Appl. Phys. 57, 2018
- K. Hayashi et al: Optical Materials, Volume 96, October 2019
【著者紹介】
佐々木 勝(ささき まさる)
Orbray株式会社 フォトニクス技術本部 デバイス開発部 部長
■略歴
1993年 八戸工業高等専門学校 機械工学科卒業
1997年 長岡技術科学大学 機械システム工学専攻修了
1997年 並木精密宝石(株)入社
2008年 アダマンド工業(株)転籍
2018年 アダマンド並木精密宝石(株)商号変更
2023年 Orbray(株)商号変更
日油、産学委託研究型オープンイノベーションプログラム4社の採択

ReGACY Innovation Group(株)および日油(株)は、この度、共同でエレクトロニクス分野の専門技術・製品を有する大学・研究機関やスタートアップ企業とともに事業協創を目指す「日油 産学委託研究型オープンイノベーションプログラム」(以下 本プログラム)を実施し、この度、本プロジェクトにおける採択者を決定した。
日油は、「ライフ・ヘルスケア」「電子・情報」「環境・エネルギー」の3分野にて独創性ある製品を多角的に展開している。昨今、社会の仕組みや人々の生活に変化が激しい中、世界的な環境問題から地政学的なリスクによる生活品の値上げまで様々な社会問題が生じている。日油は本プロジェクトを通じて、自然環境負荷の軽減と経済成長の両立を目指し、人々が安心して生活できる社会の実現を目指す。
今回はエレクトロニクス分野の素材や技術に関して、今後の市場成長と日油の技術活用が見込まれる9つの注力領域を日油との事前検討を通じて設定した。
本プロジェクトは2022年10月より2か月間の公募を開始し、多種多彩な全国の大学・研究機関・スタートアップから応募してもらった。同社での事業化の可能性などを慎重に評価、審査した結果、4社のスタートアップ企業および大学・研究機関の皆様を採択した。
今後、採択された技術について委託研究費を提供し、社会貢献に向けた研究を1年間かけて進めて貰う。その後、成果に応じて契約期間の延長や日油との共同研究開発につなげていく予定であるという。
●概要
主催: 日油株式会社
名称: 日油 産学委託研究型オープンイノベーションプログラム
公募サイト: https://nof.regacy-innovation.com/
●募集テーマ
(1)超高速通信(アンテナ, 基板)
(2)次世代ディスプレイ(フィルム、発光材料)
(3)新規発電技術(フィルム, 発電体)
(4)EV・家電・民生機器向けパワー半導体材料(SiC, GAN, Diamond)
(5)自動運転、ロボット、ドローン自律制御センシング(LiDAR、カメラ)
(6)モーターの高性能化(磁石, 基板)
(7)二次電池(正極活物質、負極活物質、電解液、セパレータ)
(8)生体データ取得(センサ, フィルム)
(9)PC、スマートフォン、家電、電子機器向け半導体全般
■採択者一覧(五十音順、敬称略)
企業名:ウィンゴーテクノロジー株式会社
代表者名:代表取締役社長 ウィンモーソー
大学名:国立大学法人 信州大学
代表者名:工学部 電子情報システム工学科 佐藤 光秀 助教
大学名:国立大学法人 北陸先端科学技術大学院大学
代表者名:先端科学技術研究科 松見 紀佳 教授
大学名:国立大学法人 山形大学
代表者名:大学院 有機材料システム研究科 片桐 洋史 教授
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000031.000099287.html
リケンテクノス、東大と共同でPVCフィルムを用いた二次元物質の新規加工法を開発
リケンテクノス(株)は、東京大学生産技術研究所との共同研究によりPVCフィルムを用いた先端材料の可能性をもつ二次元物質の新規加工方法を開発した。
二次元物質とは、グラフェンや遷移金属ダイカルコゲナイド等のように原子1個分という極めて薄いシート状の構造をしており、剥片材料として従来の材料とは異なる特性を示すことが明らかになっている。特に、グラフェンは、シリコンの100倍程度ともいわれる電子伝導性、熱伝導性を有し、ダイヤモンド並みの強度と柔軟性を併せ持つことから、次世代の超高速電子デバイスや高感度センサ、省電力トランジスタ等の分野で産業利用に向けた研究開発が活発に行われている。
一方で、この材料自体は極めて小さく薄いために取り扱いが難しく、グラフェン片を持ち上げて目的の場所まで移動させる、シート片同士を重ねるといった加工は成功率が低いため研究の加速、実用化の課題となっていた。
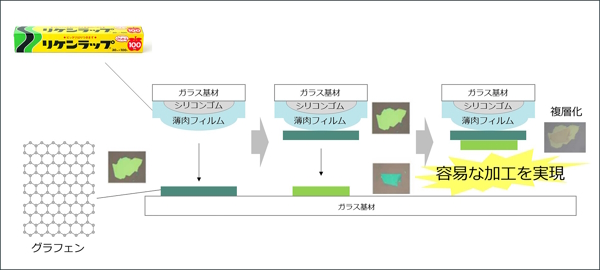
グラフェン片を加工するための工程として様々な素材を検討していた大学研究室より、当社製品「リケンラップ」を用いると加工の成功率が高くなる傾向があるという相談をきっかけに、理由解明と加工方法確立の共同研究を開始した。当社の基盤技術であるPVC配合加工技術と製膜加工技術を用いてフィルムの処方検討・検証を行いつつ、グラフェン片の剥離挙動を解析した結果、加工時の温度条件等を調整することにより、容易にグラフェン片を取り扱えることが確認できた。
また、この加工方法を応用して二種類のPVCフィルムを組み合わせることにより、グラフェンや六方晶窒化ホウ素などの二次元物質を複数枚積層した複合原子層を容易に表裏反転することも可能となった。このような反転させる加工方法は従来の手法では難しく、様々な積層組み合わせの実現や次世代の半導体デバイス、スイッチング回路の加工開発において重要な技術といえる。
なお、上記研究成果は、「Scientific Reports」に掲載されている[Scientific Reports volume 12, Article number: 21963 (2022) ]。
ニュースリリースサイト(rikentechnos):
https://www.rikentechnos.co.jp/information/2023/02/28/20230227-01/
芝浦工大とLiNew、LiDAR共同研究の技術研究報告書を電子情報通信学会で発表
リスキリング(再教育)関連サービスを提供する(株)LiNewは、昨年6月から芝浦工業大学と共に研究をしていたLiDAR技術※1を使用した研修システムの生成に関する技術研究報告書を、来月3月1日に開催される電子情報通信学会SeMI研究会※2で発表することとなった。
●共同研究の概要
LiDARと環境センサを併用し、芝浦工業大学に通う学生がカリキュラムを受講している時の姿勢や周囲の環境・心拍数などの身体の状態・動向を収集した。行動周期、気温や気圧などによって学修効果の変化を測定することで、仕事や学習の生産性を向上するシステムの生成を目指した。
今回SeMI研究会で発表する成果は、ある一人の学生から計700秒取得したデータ(=LiDARのデータとして7000フレーム)で深層学習を行い、他の一人の学生のデータに適用し、高精度の状態検知に成功した。また、学修シナリオを想定した20名程度を対象に実施した実験により、2〜12分、最長で30分以上のLiDARデータおよび心拍データを取得した。今後、これらのデータを用いて、生産性を向上するシステムの改良に取り組む。
●共同研究の背景
LiNewでは世の中のITエンジニア不足を解決するために未経験からエンジニア人材としてシステム開発が行えるようになるサービス「educure(エドゥキュア)」※3を提供している。educureは人材派遣会社向けリスキリング(再教育)サービスで、2022年12月の段階で全国92社に導入され、186名のエンジニアを輩出している。
芝浦工業大学新熊教授は、良品計画社や大阪メトロ アドエラ社などの大手企業とIoT、AIに関する共同研究を行うなど、先進的な取り組みをしている。LiNewの保有しているエンジニア育成ノウハウに、芝浦工業大学のセンシングとAI解析技術を組み合わせることで、システム開発時のパフォーマンスを向上させる手法の創出を目指した。
●研究成果の概要
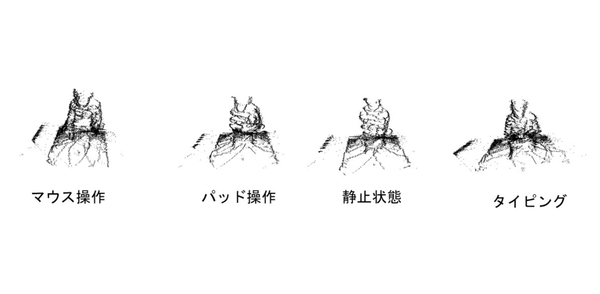
センサとしてLiDARを用い、3次元データから作業中の人の状態を自動検知する深層学習AIのシステムを開発した。シナリオとしてノートパソコンを用いた作業を想定し、コンテンツ閲覧中/マウス操作中/キーボードタイピング中/タッチパッド操作中の4状態を深層学習AIに自動検知させ、97%の精度を達成した。実験では、小型(9.7cmX6.4cmX6.3cm)で安価なLIDARセンサ2機を用いた。LiDARのデータはレーザーが物体で反射した空間座標の集合(点群データと呼ばれる)であり、カメラ画像データと形式が大きく異なる。
点群データに対応した深層学習AIの研究開発はまだ発展途上で、自動運転のための車両検知や歩行者検知が主眼に置かれているため、人のパフォーマンスに着目した本成果は世界的にも極めて先進的である。歩行者や、バイク、乗用車、トラックは大きさや形状がはっきり異なるのに対し、今回の状態は手の位置や体の傾きといった微細な違いしかないため、従来は分類が困難だった。
本研究では、点群データからノイズを除去したり二次特徴を付与したりすることで、上記の高い精度を達成することに成功した。
※1:LiDAR
Light Detection And Rangingの略称
※2:SeMI研究会
2019年4月に設立。センサネットワークとモバイルインテリジェンス研究専門委員会(Sensor Networks and Mobile Intelligence, SeMI)は,知的環境とセンサネットワーク研究専門委員会(ASN研専)
※3:educure
https://lp.educure.jp/
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000024.000068083.html
プラントの異常をドローンの鼻で検知

ボールウェーブ(株)は、(株)JDRONEが運用するドローンに、ボールウェーブのガスクロマトグラフ※を搭載して、(公財)福島イノベーション・コースト構想推進機構福島ロボットテストフィールド(以下、「イノベ機構RTF」という。)において実証試験を行い、試験用プラントの煙突から放出されるガスの捕集と高感度な分析に成功した。これによって、ドローンに搭載したガスクロマトグラフによるプラントの管理や防災保安業務への適用可能性を実証した。
JDRONE、イノベ機構 RTFおよびボールウェーブは、この成果を2023年3月17日の応用物理学会春季学術講演会で発表する。本発表は、応用物理学会プログラム編集委員が聴講を推奨する「注目講演」https://meeting.jsap.or.jp/highlightedに選定されている。
※ 中空の管をリールに巻いたカラムと呼ばれる流路を混合ガスが通過する際に時間的に分離される現象を利用して、多種類のガスの種類と濃度を測定する分析装置をガスクロマトグラフと呼ぶ。一般的には卓上に設置する大型装置で、可搬型も開発されているが感度や精度の点で大型装置を下回る。
■ 装置の工夫
化学プラントやエネルギープラントの安全で効率の良い運転には、頻繁な点検による管理が必要です。しかし、プラントには高所、高温または危険ガス放出のため人が近づけない場所が多いという課題がある。そこで、JDRONEが運用するドローンにボールウェーブの超小型ガスクロマトグラフを搭載してこの課題に取り組んだ(図1)。捕集するガスがドローンのプロペラが発生する強い気流で乱されないように、ガスクロマトグラフに長さ3mのCFRP(炭素繊維複合樹脂)管で作製したサンプリング機構を接続した。
また、プラントの管理では短時間の分析が必要である。そこで、ガスを分離する部品である金属ソレノイドカラムの長さを通常の30mから10mに変更して分析時間を短縮した。
■ 短時間で高感度な分析に成功
最初の適用試験として、イノベ機構 RTFの試験用プラントにおいて、この装置のプラント管理への適用性を検証した。煙突から放出される試験用ガスを30秒間捕集して分析した結果、石油を燃焼するプラントで通常観測されるヘプタン(C7)、オクタン(C8)、ノナン(C9)を捕集時間も含めて3分という短時間で分析できた。別途行ったセンサの校正によると、捕集中のノナン(C9)の平均濃度は17ppmv(100万分の17)であった。検出信号のノイズが小さいことから、飛行中の局所的なガスの捕集という難しい条件のもとで、検出下限1 ppmv以下という高感度な分析ができた。これには、ドローンの高精度な制御によりサンプリング機構を煙突先端に安定して保持できた効果も寄与している。
■ プラントの異常検知の可能性
さらに、特筆すべき成果として、オクタン(C8)のピークの近傍に、全く性質の異なるガスであるプロピレングリコール(P)が明瞭に検出された。このガスは、通常のプラントの正常運転では発生しない。従ってこの実験結果は、プラントの不具合で発生する異常なガスを通常のガスと分離して検出できる可能性を示している。
世界中どこでも実現できなかったこの技術を可能にした主な要因は、一般的なガスクロマトグラフより著しく小型で重量がわずか1.2kgの超小型ガスクロマトグラフ[1]である。この装置は、新しい物理的原理[2]に基づくボールウェーブの独自センサであるボールSAWセンサを利用して開発された。
この技術により、運転中のプラントの異常検知が可能になるので、プラントの事故の低減と運転条件の最適化によるエネルギー効率の向上に寄与する。また、公共空間での危険物の発見と識別などで、防災や保安の分野でも役に立つという。
【文献】
[1] 岩谷等:Jpn. J. Appl. Phys. 61, SG1051 (2022).
[2] 山中等:Appl. Phys. Lett. 76, 2729 (2000).
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000019.000038635.html
KDL・帝国通信工業・átoaの3社が水族館における漏水予防の共同研究

(株)神戸デジタル・ラボと帝国通信工業(株)とAQUARIUM x ART átoa(アトア)は、昨年10月より3社共同で実施している「水族館における漏水予防の共同研究」においてセンサおよび検知内容等に関する改善を重ねた結果、水族館の業務効率化や安全な施設運営に向けて、一定の効果が期待できることを実証したことを発表した。
■水族館における漏水予防の共同研究の背景
帝国通信工業が実施した、公益社団法人日本動物園水族館協会へのヒアリングによると、水族館などの水族を飼育する施設における漏水事故の発生頻度は、規模の大小を問わず含めると決して珍しいものではなく、全国の水族館で課題として顕在化しているという。
原因は、ポンプや配管の詰まりによるもの、不意の電源停止によって循環ポンプが止まることによるもの、設備の老朽化に伴うものに加えて、水栓の閉め忘れなどのヒューマンエラー等が挙げられる。程度や状況によっては飼育している水族や来館者にも影響が及ぶ可能性もあり、巡回等による人的対策を実施するなど施設の業務やコストの負担増につながっている。
■共同研究の概要
共同研究では、帝国通信工業がフィルム式の静電容量式センサを水族館向けに改良した「No-Blue(ノーブル―)」を開発。センサまで水位が達すると、飼育スタッフのスマートフォンのメッセンジャーアプリ「LINE」に通知が届く仕組み、および検知データを可視化する仕組みの構築をKDLが担当した。また、átoaの「展示水槽」や「ろ過槽(※)」などに「No-Blue」を取り付け、テスト・評価をátoaの飼育スタッフが担当した。
研究では、異常水位を判定し通知できるか、または飛沫などに対して誤検知しないかのほか、海水での使用による塩の結晶の付着などに耐えうるか、現場の業務に支障がないかなど様々な観点で試作を重ね、評価を行った。
※ろ過槽・・・生物がいる水槽の水をきれいにするための水槽。生物の水槽の水はろ過水槽に送られ、このろ過水槽内でフィルターやバクテリアなどの力で水をきれいにし、ポンプで生物の水槽に戻す。
プレスリリースサイト:https://www.dreamnews.jp/press/0000276134/
小型地球観測衛星に搭載するKa帯無線機の低消費電力化の研究
(株)アクセルスペースと東京工業大学 科学技術創成研究院 未来産業技術研究所の白根篤史准教授と同 工学院 電気電子系の岡田健一教授、戸村崇助教は、従来の無線機の半分以下の消費電力で稼働する小型地球観測衛星用のKa帯*1)無線機の開発に成功した。
現在、スマート農業における農地管理や環境モニタリング、防災・災害対応など、小型人工衛星による地球観測データの活用が注目されている。今後需要が高まるとともに、宇宙から地球へ効率よくデータを送る仕組みが必要となる。
これまで小型地球観測衛星で使用していた無線機では、撮影したい方向と撮ったデータを地球に送るためにアンテナを向けるべき方向(姿勢制御)が一致せず、撮影とデータ通信の両立面での制約があった。数トンクラスの大型地球環境衛星では、従前より複数種類のアンテナを搭載して地上局との距離に応じてアンテナを使い分けたり、姿勢制御の競合を避けるために指向性を制御できる機械式ジンバルやフェーズドアレイ*2)無線機を用いることが可能だが、小型衛星では、アンテナを格納できるスペースの課題と無線機に許容される消費電力の制約の観点から採用が困難だった。
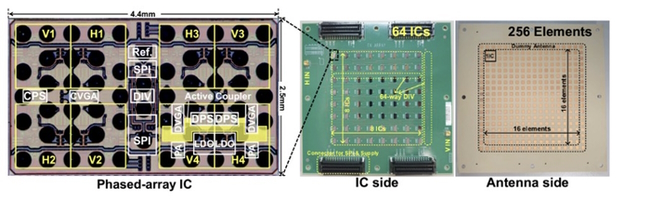
また、センサ技術やデータサービスの進歩に伴い、最新の地球観測ミッションでは、大量のリモートセンシングデータを地球局へ短時間でダウンリンクするために、より高速な通信が要求される傾向にある。搭載できるアンテナのサイズと使用できる電力量に制約がある小型衛星において、これら2つの課題を解決するために、アクセルスペースと東京工業大学は、広帯域Ka帯送信機とアクティブフェーズドアレイアンテナを組み合わせたダウンリンクシステムを開発している。
今回の研究で開発したKa帯フェーズドアレイ無線機は、二つのポートを持つアンテナ、増幅器、位相器、そしてアクティブハイブリッドカプラで構成されており、低消費電力での電気的な指向性制御を可能としている。新たに考案されたアクティブハイブリッドカプラ回路技術では、フェーズドアレイ無線機の消費電力を大幅に減らすことができ、これを使用すれば従来よりも高速でリアルタイム性の高いデータ通信が可能となる。
今回の無線機の製造ではCMOSプロセスを採用しており、安価で量産が可能。同社では今回、開発に成功した低消費電力のフェーズドアレイ無線機を自社の小型地球観測衛星に搭載し、数年以内に軌道上実証を行う計画である。地上の撮影とデータのダウンロードにおけるタイムラグをなるべく短くし、衛星データ活用を加速させるべく、さらなる研究開発を進めるという。
※本研究成果は、JST 研究成果展開事業研究成果最適展開支援プログラム A-STEP 産学共同 JPMJTR211D の支援を受けたもの。
本研究の成果について国立大学法人東京工業大学からの発表は以下URLよりご確認を。
URL:https://www.titech.ac.jp/news/2023/065976
本研究成果は2023年2月19日から開催される国際会議「ISSCC」において発表予定。
*1) Ka帯:一般には 26-40 GHz までの周波数帯域を示すが、ここでは地球観測衛星に割り当てられているKa帯(25.5G‐27GHz)を指す。
*2) フェーズドアレイ:複数のアンテナへ位相差をつけた信号を給電する技術。放射方向を電気的に制御するビームフォーミングの実現に利用される。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000023.000066150.html
電子錠開閉システムと連携可能な顔認証アクセス制御端末「SAFR SCAN」

AI顔認証ソフトウェア「SAFR®」を展開するリアルネットワークス(株)は、顔認証アクセスコントロールシステム「SAFR SCAN」(セイファースキャン)を日本にて発売開始する。
■「SAFR SCAN」とは
新発売となる「SAFR SCAN」は、厚生労働省の健康保険証対応マイナンバーカードリーダーに採用された顔認証ソフトウェア「SAFR®」を使った、世界最高水準のアクセス制御端末である。IP65(防塵防水)、マスク対応、写真や動画によるなりすまし防止、共連れ入室防止にも対応している。また電子錠のWeigand、OSDP、リレー出力に対応しており、既存の電子錠設備に容易に統合できる。
■「SAFR SCAN」主な特長
・なりすまし防止機能
顔認証システムでは、写真や動画等による「なりすまし認証」が課題の一つ。「SAFR®」は、カメラの前にある顔情報が生きている人間か、写真か、スマートフォンなどで再生された動画かを立体的に3次元判定することで、なりすましを防止できる。
・屋外など厳しい環境でも動作
防塵・防水保護 IP保護等級 :IP65 屋外設置可能
衝撃保護等級 :IK08
・端末に最大2万人まで登録可能
・暗闇でも顔識別が可能なIRセンサ内臓
・スマートフォンアプリ「SAFR Key」(セイファーキー)
このアプリはスマートフォンを「SAFR SCAN」の二次認証に使用できる。(顔+スマートフォンの認証となる)
スマートフォンをポケットやカバンに入れているだけで、自動的に「SAFR SCAN」にBluetooth経由でモバイルクレデンシャルを送る。
「SAFR SCAN」を「顔+モバイルクレデンシャルで認証」モードにしておくと、顔と「SAFR Key」が揃ったときにだけ解錠。
■「SAFR SCAN」設置イメージ
ビル、マンションの入口、病院、オフィスの入退室、駅改札、駐車場の入口で車に乗ったまま顔認証で入場する、などセキュアアクセスがある場所
■スケジュール・価格
モデル:SFR-SC100(顔認証モデル)、SFR-SC200-RF(顔認証+カードリーダ)
販売開始:2023年3月
出荷開始:2023年4月(※状況によりスケジュール変更となる場合あり)
価格:お問い合わせ
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000041.000046740.html
アスク、NOITOM社製モーションキャプチャデバイスの取扱い開始
(株)アスクは、NOITOM社製のモーションキャプチャデバイス、及びVRインタラクティブグローブの取扱いを開始する。
2012年に設立されたNOITOMは、モーションキャプチャのパラダイムを再定義する目標に向かい、先見性のあるエンジニアや科学者のチームと共に活動している。NOITOMは、モーションキャプチャを普遍的な技術にすることに取り組んでおり、MEMSセンサを使用した革新的な製品を開発することで、映画、医療、研究、スポーツ、教育、XR業界向けに世界クラスの高精度モーションキャプチャソリューションを提供している。
同社が取扱いを開始する製品は、高精度な慣性センサ式モーションキャプチャシステムとなるPerception Neuronシリーズの「Perception Neuron 3」、「Perception Neuron Studio」のほか、細かな指の動きを表現する慣性センサ式のVRインタラクティブグローブ「Hi5 2.0 VR Gloves」となる。
○製品の詳細については製品ページをご参照のこと。
●NOITOM Perception Neuron 3 製品ページ(メーカーサイト)
https://neuronmocap.com/pages/perception-neuron-3
●NOITOM Perception Neuron Studio 製品ページ(メーカーサイト)
https://neuronmocap.com/pages/perception-neuron-studio-system
ニュースリリースサイト(ask):https://www.ask-corp.jp/news/2023/02/noitom.html