セントマティック(株)
1.絶対的な”スペック”の時代から人間中心の時代に?
私は恥ずかしながら自分が利用しているスマートフォンのスペックを把握していない。譲り受けたものであるからという理由もあるが、記憶容量、バッテリーサイズ、チップのスペック、画面サイズについて何も把握していない。それでもなんら問題なく利用できている。私に限らずそのような方は多いのではないだろうか。スマートフォンに限らず、世の中の様々な商品において、「機械的なスペック」に対して関心が向けられる機会が減ってきていると感じる。実際のところ、特にコンシューマー向けのサービスにおいては、(ISO準拠ではなくとも)人間中心設計(Human Centered Design=HCD)や、それに類似する概念は、もはや新しいものではなく、多くの企業のサービス開発において、ごく自然に用いられていると感じる。更に、ナラティブマーケティングと呼ばれる「物語」や「文脈」、SDGsのような社会善を重視する企業も増えており※1、消費者もそのような取組を行う企業やサービスを選好する傾向もより一般的になっていると感じる。https://www.tdb.co.jp/report/watching/press/p230714.html
このようにスペック一辺倒からの脱却は昨今の流行、企業競争において無視できないものとなっていることがわかる。しかし、一方で「物語」やSDGsではクルマのエンジンは動かず、食品から栄養も接種できず、人間は効用を得ることができない。残念ながら少なくとも当面の間は、我々人間は、生物として(比較的)原始的な効用も無視できないようだ。
2.感性を測るということ
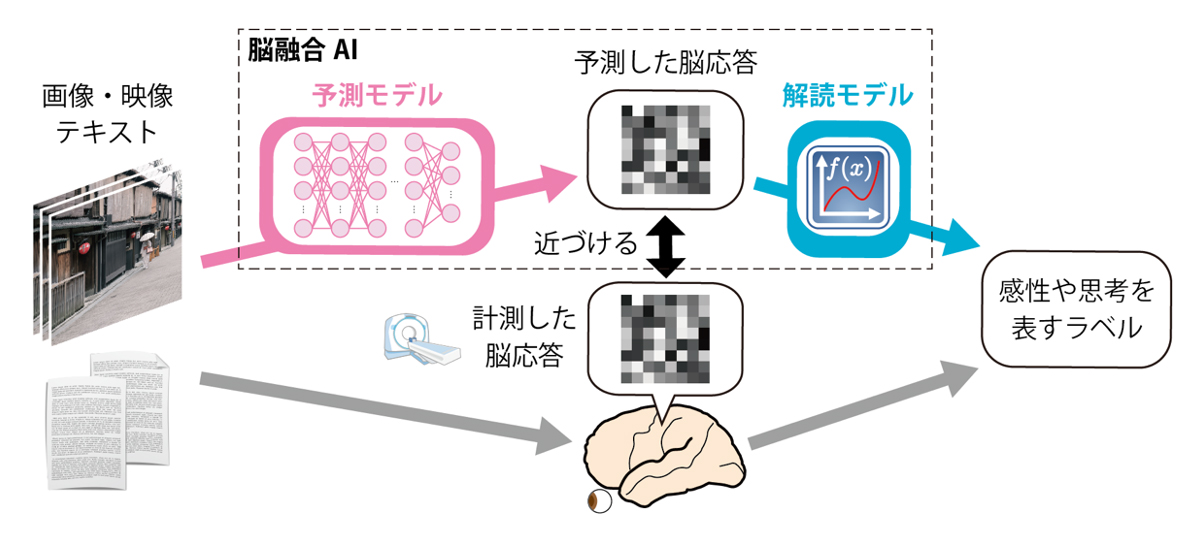
感覚器官が感じ取るその対象は、化合物、光や音波といった物理的な性質をもったものである。物理的な性質そのものを計測したければ、例えば木材の長さを測りたければ定規を、重さを測りたければ重量計を使えば良い。しかし我々は物理そのものを受け取っているわけではなく、感覚器官を通じてそれらを感じて(計測して)おり、物理的な性質と感覚器官を通じた「精神的な性質」はイコールではない。
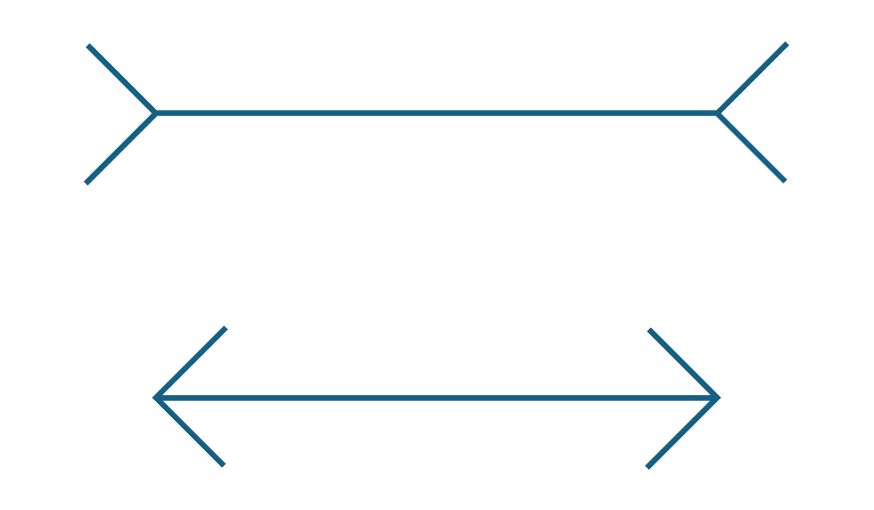
図1 ミュラー・リヤー錯視
上記のような錯覚の事例においては、物理的な性質は「実際の2本の線の長さの大小」であり、精神的な性質は「体感する2本の線の長さの大小」である。画面上の線の長さを錯覚してもなんら問題はないが、現実には致命的な錯覚というものも存在する。
3.サービスの紹介(計測する)
私は幸いなことに(?)人間の感性に関係する2つのサービスの開発や運営に携わってきた(また多くの企業に向けて同様な領域のサービス開発のコンサルティングを提供してきた)。それぞれが対象とする感覚も業界も異なるが、感性を対象にしたサービスという括りで近しいと感じることも多い。
3.1 D-Planner®(株式会社NTTデータ)
https://d-planner.nttdata-neuroai.com/ https://d-planner.nttdata-neuroai.com/case/cat11/003.html
3.2 KAORIUM(セントマティック株式会社)
https://scentmatic.co.jp/ https://www.a.u-tokyo.ac.jp/topics/topics_20230113-1.html https://scentmatic.co.jp/news/20240328
それぞれのサービスが出来た経緯、思いは異なるが、どちらも曖昧で捉えどころない「感性」を、なんらか機械の力を借りて見える化し、組織や自分自身のなにかしらの意思決定を補助するツールとして活用していることがわかる。従来は、D-Plannerであればデザイナーやプランナー、KAORIUMであれば店員やソムリエ、といった人間のプロフェッショナルが解決していた分野にAIが参入しており、感性の領域においても人間の可能性を拡張する方向性は今後より活発になっていくと考えられる。
次回に続く-
【著者紹介】 大山 翔(おおやま しょう)
2015年慶應義塾大学経済学部卒業。新卒でNTTデータに入社。鉄道会社、自動車メーカー、研究機関等多くの企業に向け、ニューロサイエンスに関する営業企画、商品企画や、戦略~業務コンサルティングサービスを提供。通信事業者向けの大規模システム統合プロジェクト、インフラ事業者との新規事業創出、事業連携に従事した後、2020年よりNeuroAI及びD-Plannerの企画、後にサービス主幹を担当。多くの消費財メーカー、サービス業向けにサービス提供を実施。2024年より現職。主にフレグランス領域で営業企画やサービス企画を担当。
【著書(共著)】
大阪大学
1. はじめに
本稿では、ロボットハンド手指のセンシングに焦点を当て、計測技術を紹介し、人間の代わりに作業するロボットへの応用に関して解説する。
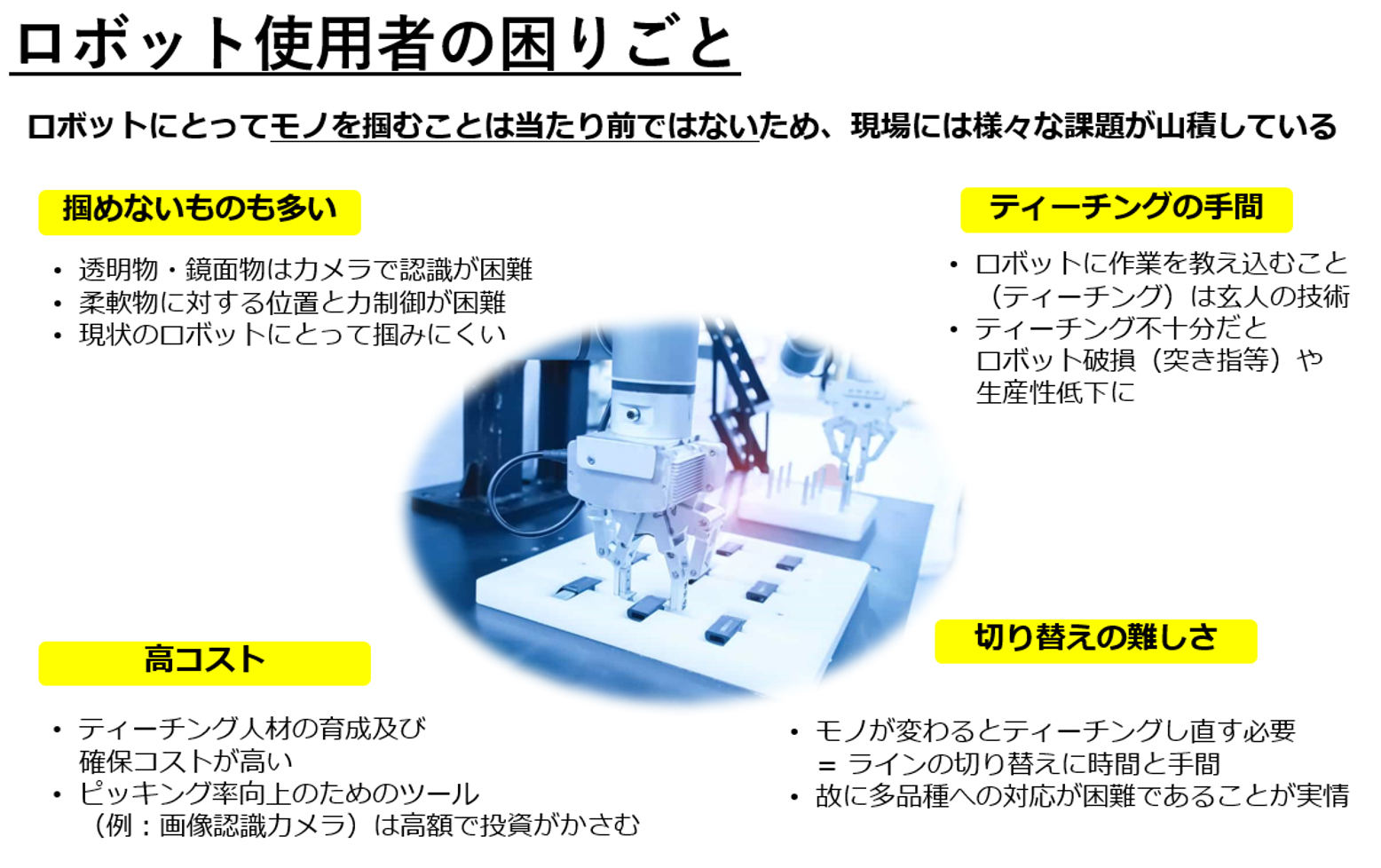
図1: 現状のロボットシステムにおける課題
2. ロボットハンド手指用のセンサ開発
ロボットハンド手指のセンシング手法は大別すると触覚センサ、近接覚センサ、力覚センサがある。触覚センサと力覚センサは接触センシングであり、近接覚センサは光や電場、音波の反射を利用する非接触センシングである。[1] が盛んに研究開発され、一部は実用化されている。視触覚センサは接触力の分布と物体のすべりを検知することができるため、油汚れなどで滑りやすい食器や、柔らかい食品を自動的にピックアップする工程で需要がある。ただし、テーブルやばら積みされた物体に対して高速かつ適応的に3次元的な位置決めを行う事が難しい課題がある。ロボットアームがヒトの腕のように小型軽量に構成されており、手先において高速な力のコントロールがしやすいシステムの場合は、触覚・力覚センシングは非常に有効であると考えられる。しかし、ロボットシステムは一般的に金属の塊であり、重量や慣性モーメントが大きい。ハンド手先や指先を高速に物体や環境に接触させつつ力のコントロールをすることを苦手とする。従って、ロボットアームに触覚センサや力覚センサを搭載し、力のコントロールを行わせる場合、衝撃力や接触時の振動を低減するためには、ロボットの動作速度を遅くせざるを得ず、作業効率が低下する。[2] は光反射式の測距センサを2指グリッパの先端に複数個搭載したロボットシステムを提案した。研究例は古くからある一方で、近接覚センサを搭載したロボットは今現在、普及しているとは言い難く、マニピュレーションの研究分野内でも極めて少数派である。この要因の一つに近接覚センサの計測値はピックアップする物体の材質や表面性状の影響を受けやすい点がある。特に光学式のセンサは小型サイズであることからグリッパ指先などの限られたスペースに搭載しやすい一方で、物体表面の光の反射特性の影響を受けやすい。この問題を克服するために、現在までに様々な計測原理の近接覚センサが考案されている。以降では主な光学式の近接覚センサを紹介し、著者が研究開発している近接覚センサの特徴を述べる。
3. Time of Flight式
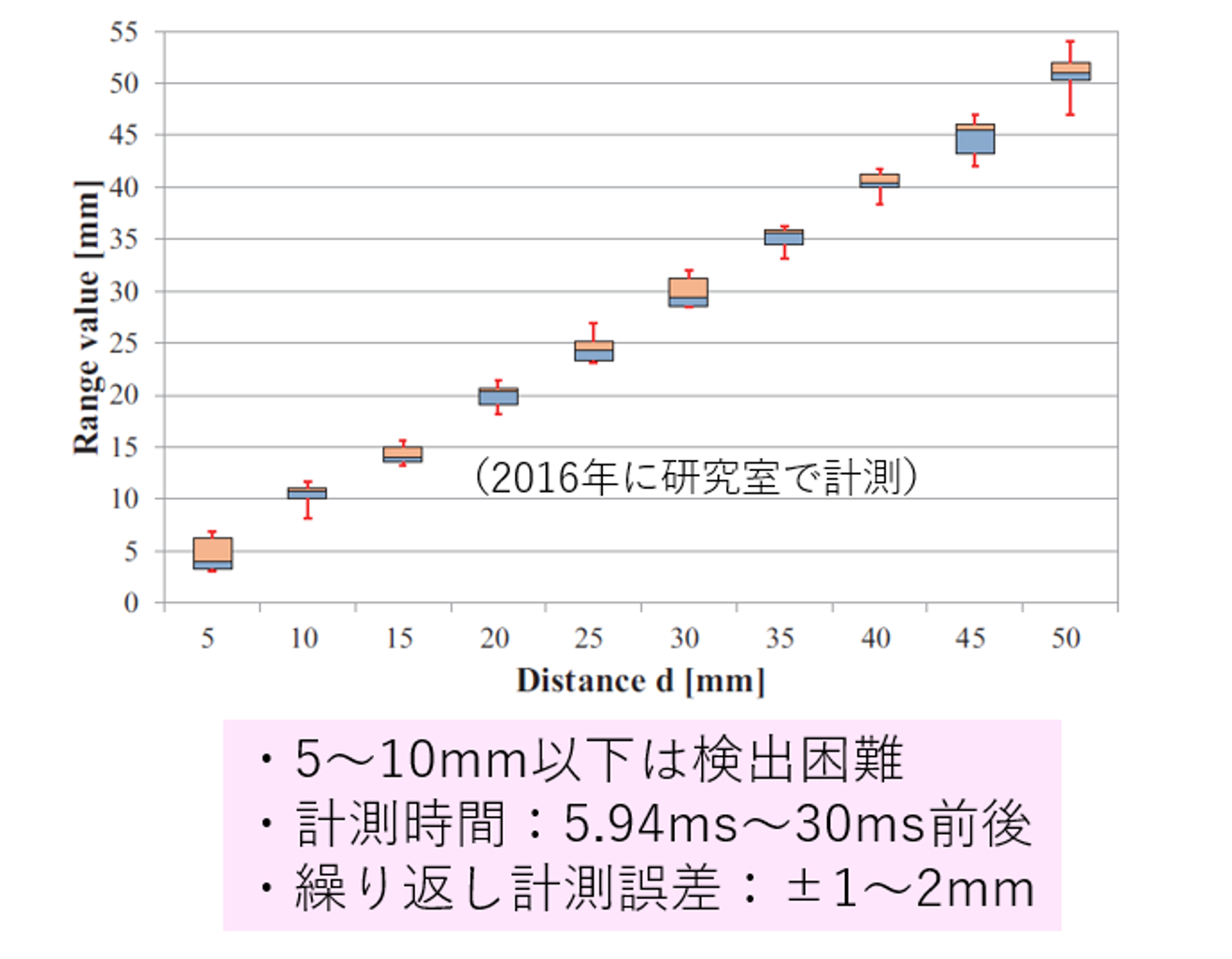
単一光子を検出可能な高感度な受光素子(アバランシェフォトダイオード)を用いた小型の測距センサが2014年から製品化され、広く販売されている。数ミリサイズの筐体の中に発光・受光素子とコントローラが内蔵され、外部のマイクロコントローラと接続してシリアル通信(I2C、SPI通信)経由で計測値を受信可能なタイプが多い。基板上に実装するのみで手軽に測距機能を実現できる。2015年ごろから現在まで、ロボットハンドの指先にTime of Flight(ToF)式のセンサを搭載し、物体操作時の成功率を上げる試みが行われている[3] 。
図2: 代表的なTime of Flight式の小型測距素子の距離計測特性
4. 三角測量方式
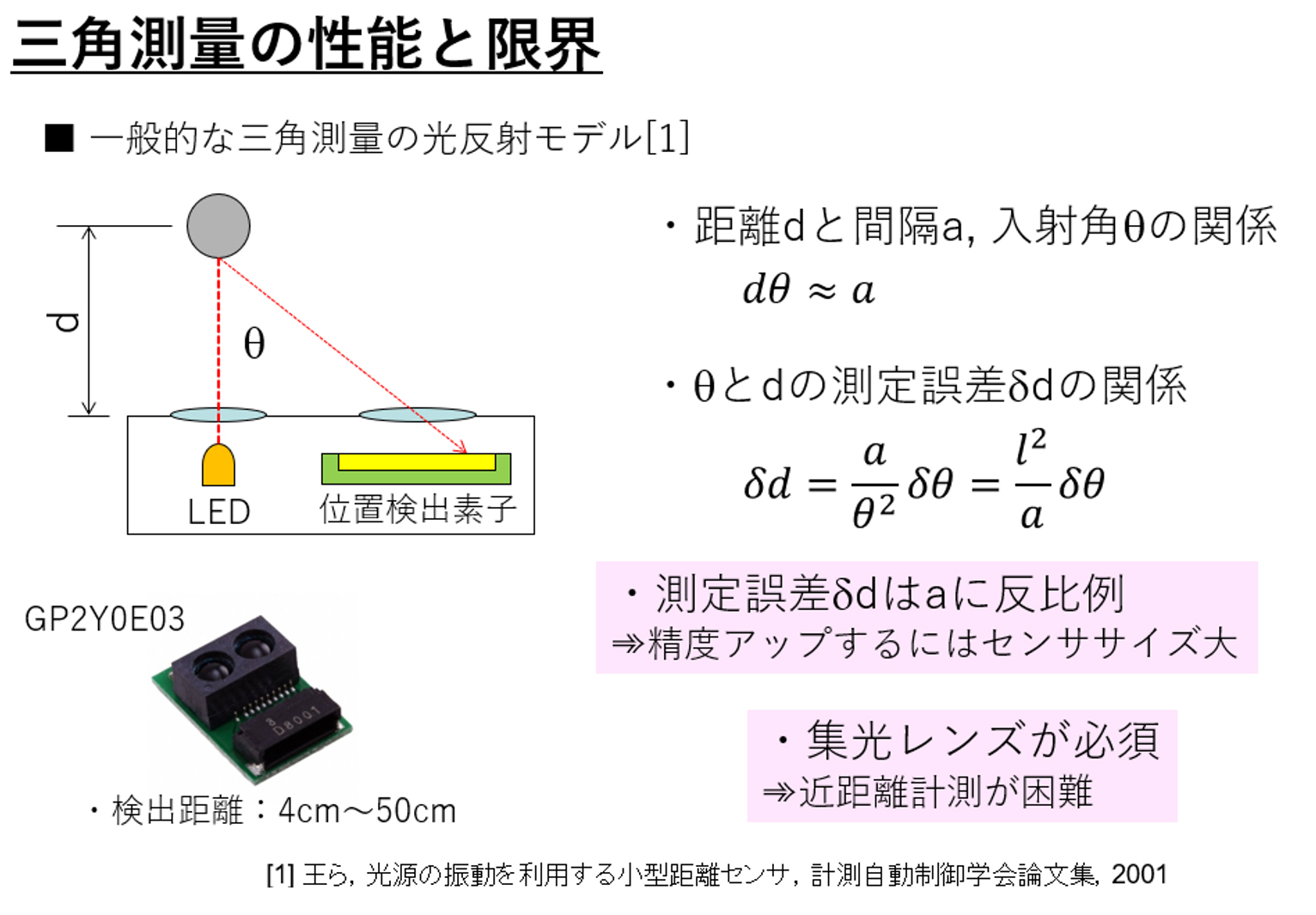
面状あるいは線状の受光部とレンズ系、単一の発光部で構成される原理であり、主に高精度なレーザ変位計の基本となる方式である。物体面からの反射光をレンズで集光し、受光位置から物体との距離を算出する。特に近距離において計測精度と分解能を高めやすいため精密な測定に向いた方式である。しかし、レンズを使用する関係上、焦点距離が生じ、概ね10ミリメートル以下の近距離計測が難しい問題がある(図3)。また、物体面が傾いている場合は測距精度が悪化しやすい欠点もあり、ロボット指先に搭載する上では課題が多い。
図3: 三角測量式の測定誤差と課題
次回に続く-
参考文献
W. Yuan, R. Li, M. A. Srinivasan and E. H. Adelson, “Measurement of shear and slip with a GelSight tactile sensor,” 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, pp. 304-311, 2015.
R. A. Lewis and A. K. Bejczy: “Planning considerations for a roving robot with arm”, IJCAI Proceedings of the 3rd International Joint Confetence on Artificial Intelligence, pp.308-316, 1973.
P. Lancaster and P. Gyawali, C. Mavrogiannis, S. S. Srinivasa and J. R. Smith, “Optical Proximity Sensing for Pose Estimation During In-Hand Manipulation,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 11818-11825, 2022.
【著者紹介】 小山 佳祐(こやま けいすけ)
■著者略歴
STマイクロエレクトロニクスは、アナログ入力の車載用D級オーディオ・アンプ「HFA80A」を発表した。同製品は小型・高効率で部品点数の削減に貢献し、車載向けに最適化された負荷診断機能および優れたEMC特性を備えているという。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000001405.000001337.html
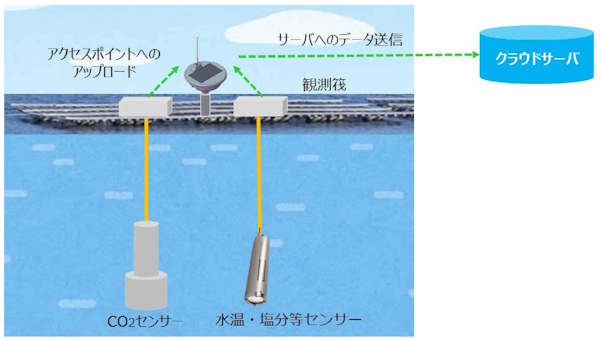
オーシャンソリューションテクノロジー(株)〔以下、OST〕は、長崎大学、(国研)国立環境研究所および、(公財)長崎県産業振興財団と共同で応募した令和6(2024)年度「成長型中小企業等研究開発支援事業」の補助事業者として採択され、8月30日に交付決定された。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000011.000096785.html
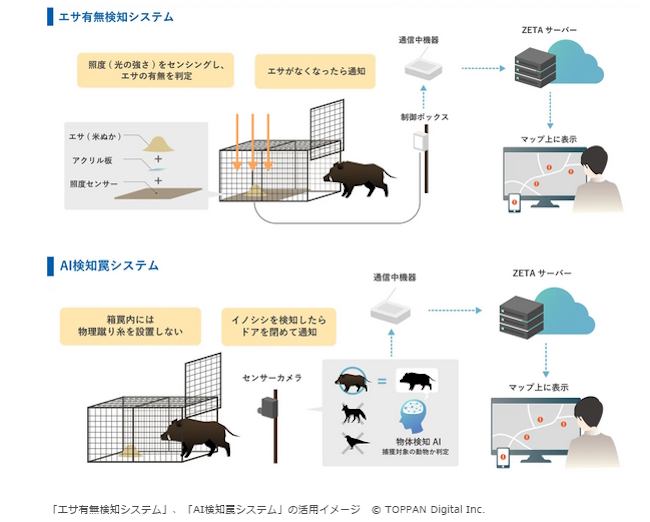
福岡県大牟田市と、TOPPANホールディングスのグループ会社であるTOPPANデジタル(株)は、大牟田市内で発生しているイノシシによる獣害の低減に向け、獣害対策IoTシステムの実証を2024年10月から12月末までの約3か月間実施する。
プレスリリースサイト(toppan):https://www.holdings.toppan.com/ja/news/2024/09/newsrelease240926_1.html
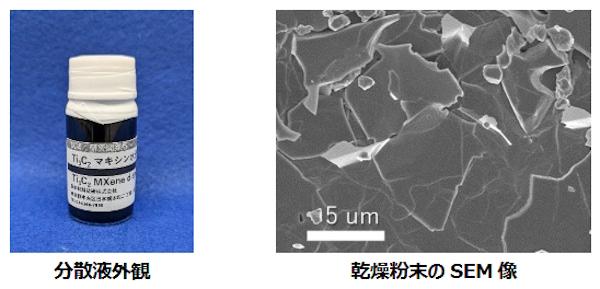
日本材料技研(株)は、このたび、Ti3C2 MXeneの水分散液のサンプル販売を開始した。
プレスリリースサイト(jmtc):https://www.jmtc.co.jp/
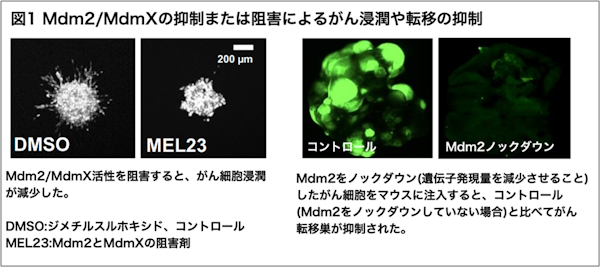
千葉大学大学院医学研究院の田中知明教授と、コロンビア大学のCarol Prives教授の国際共同研究チームは、がんの転移に働く遺伝子発現の新しいメカニズムを解明した。
プレスリリースサイト(chiba-u):https://www.chiba-u.ac.jp/news/research-collab/mdm2.html