(株)アロマビット
1 はじめに
人の五感のうち視覚はカメラ、触覚はタッチセンサ、聴覚はマイクロホンというように物理的な波動や信号を使って感知するものについては既に電子化・デジタル化され、インターネット空間を使って伝達することも容易に行えるようになっている。
2 e-Nose型ニオイセンサとは
2.1 歴史
1960年代初頭、人が匂いを感知する仕組みとして様々なモデルが提唱されたが、その中でも化学物質の物理的な構造に対して親和性を持つ吸着サイトのようなものが人の鼻に存在し、それぞれのサイトごとに異なる特徴を持つ化学物質の構造部が吸着することで匂いに含まれている化学物質の組み合わせに応じた応答パターンを与えるという一種の鍵と鍵穴モデルが提唱された。1) 、 特性の異なる複数の酸化物半導体センサ素子をアレイ化して電子鼻を構成したIkegamiら2) の成功により再び研究者らの関心を引くこととなった。
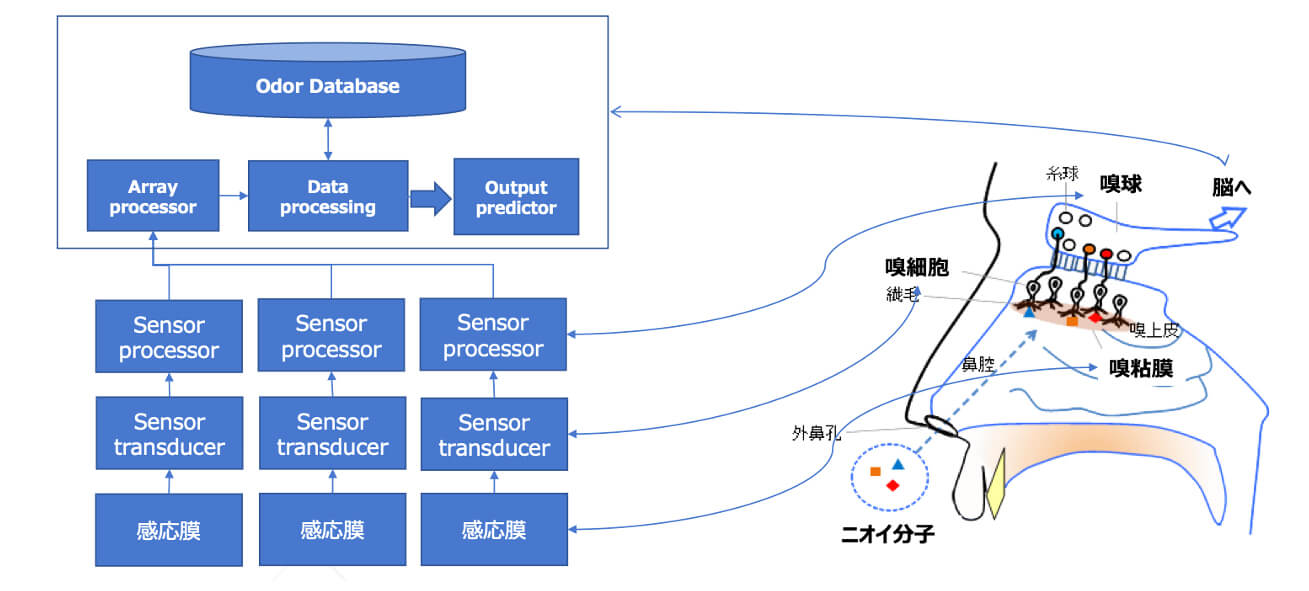
図-1 e-Noseの定義と人の鼻との比較
その後、2004年にノーベル生理学賞を受賞したAxelとBuckにより、哺乳類の鼻には遺伝情報上にクラスタリングされることで複数の異なる化学物質親和性を持つレセプター部位が空間的に固定されて存在していることが報告され、人工的に化学物質親和性の異なる感応膜を複数のトランスデューサ場に形成した並列型センサシステムが機能的には哺乳類の鼻を模倣していると考えて良いことが裏付けられている。
2.2 特徴
e-Nose型ニオイセンサは前述のように親和性の異なる感応膜によるアレイ型構造を取ることにより、匂いを定量的な分析ではなく匂いを構成する化学物質のポートフォリオを鳥瞰するようなパターンとして捉えることを特徴とするセンサである。
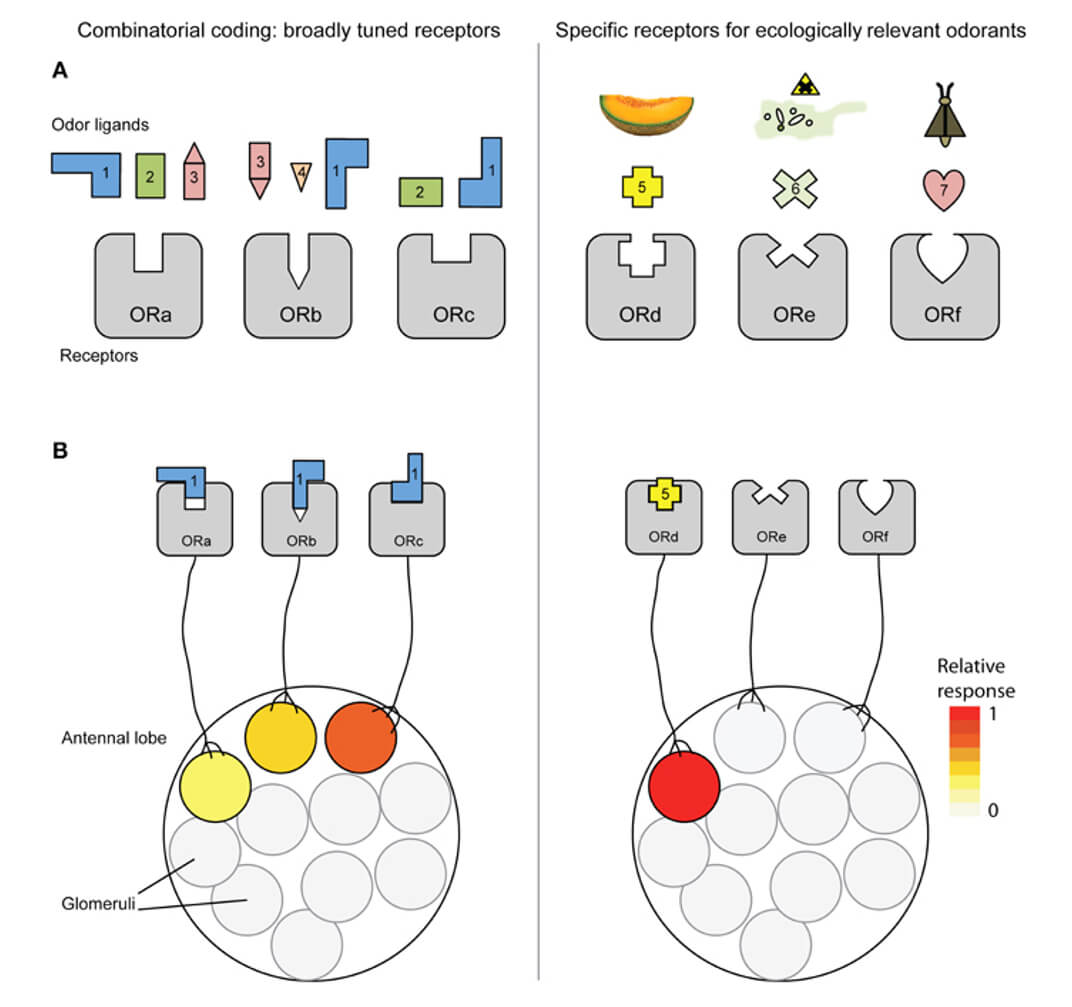
図-2 哺乳類の匂いパターン化のイメージ 3)
3 e-Nose型ニオイセンサに用いられるトランスデューサ
e-Noseの性能において前述のように感応膜の設計と組み合わせが匂いの判別に大きな影響を与えることを説明した。一方、電子的なセンサとしての性能、大きさや安定性、感度に大きな影響を持っているのがトランスデューサの部分である。
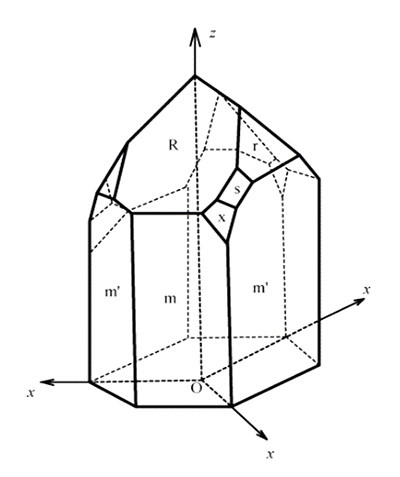
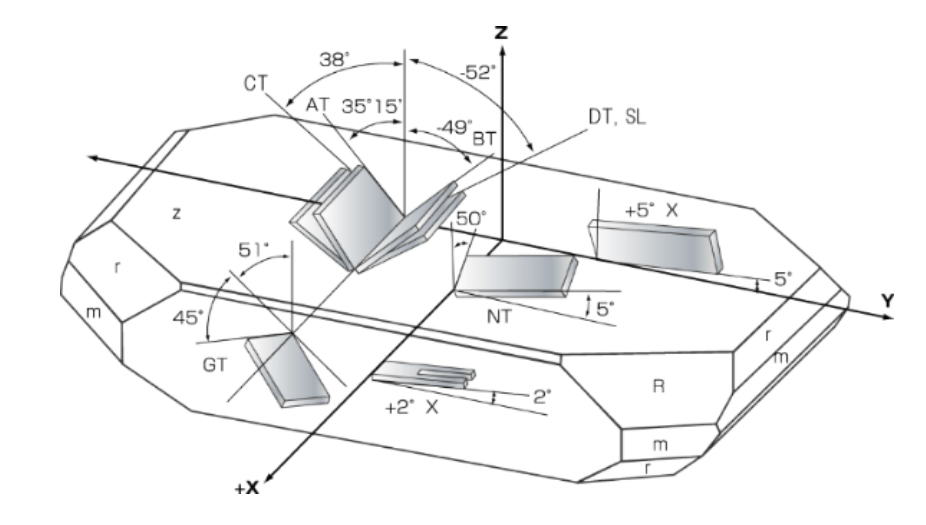
これらのセンサにおいて、水晶振動子を用いたセンサ(QCM)は人工水晶をX軸に平行でZ軸から35°15′の角度で切り出されたATカット水晶と言われるものを利用するのが一般的である。この水晶に電界を印加すると安定した高周波振動が得られるが、この振動は発振電極の表面になにかの物質が付着すると、その重量分だけエネルギーの損失が起き共振周波数の低下が起きる。4)
FETをトランスデューサとするセンサはゲート上に形成される感応膜にニオイ分子が吸着したときに起こる膜状の電荷変異やその他の電気的な変化を電圧閾値の変化として読み取る原理である。このFETをCMOSとして形成することで高密度にトランジスタアレイを形成したトランスデューサとして利用することができる。現在では1ピクセルあたり5μmレベルの高精細化が可能となっており、将来ニオイセンサを超小型化する際には他の追随を許さないものである。一方、このセンサに用いる感応膜は分子親和性を制御するアンテナ部と吸着によって膜状に電気・電子的な変異を誘発させる分子内トランスデューサ部の2つが必要であり、膜材料設計に高度な技術力が必要である。
酸化物半導体は構成が簡単で単素子であっても分子種による熱抵抗の変化の相違をパターン化することで匂い分析が可能とされるものの、同じ還元性のレベルの物質同士の峻別が苦手であること、半導体自体を500℃レベルの高温に加熱して使用する必要があることから高消費電力であること、使用を繰り返すと酸化物半導体の構造欠陥が拡大し使えなくなってしまうなどの問題がある。
また、MEMS型では圧電MEMSを用い、その表面に構成する感応膜へのニオイ分子の吸着による共振周波数変化を見ることでパターン化する原理のものと、歪抵抗変化を観測するひずみゲージ型MEMSをトランスデューサとするものが知られている。これらはいずれも通常のMEMS製造プロセスで製造可能なために素子の大きさは300〜500μm程度と水晶振動子に比べるとやや小型化が可能である点は優位な点である。
光学式センサとして代表的なものはナノメタルに光を照射するとその表面に生成する表面プラズモン共鳴という現象を応用したSPRセンサと呼ばれるものがある。このセンサはナノメタル表面の光の屈折が分子の吸着によって起こる変化を光学系を構成して読み取るものであり、照射する単色光の強度を強くし、光路長を長く取ることでpptレベルの超高感度センサとすることも可能であるが、そのためには長い光路長を確保するために装置全体を大きくする必要がある。
次回に続く-
参考文献
Krishna Persaud & George Dodd, Nature volume 299, pages 352–355 (1982)
M. Kaneyasu; A. Ikegami; H. Arima; S. Iwanaga, IEEE Transactions on Components, Hybrids, and Manufacturing Technology, vol. 10, no. 2, pp. 267-273, June 1987
Frontiers in Ecology and Evolution | www.frontiersin.org 1 May 2015 | Volume 3 | Article 53
T.Nakamoto and T.Moriizumi,”Odor sensorus- ing quartz-resonator array and neural-network pattern recognition” Proc.IEEE Ultrasonics Symp.,Chicago,IL, U.S.A.,613-616(1988)
【著者紹介】 橋詰 賢一(はしづめ けんいち)
■略歴
1983年 日本カーリット株式会社中央研究所入社 主として電子材料・機能性化学品の開発に従事 1991年 ERATO吉村π電子物質プロジェクト研究員 ファインカーボン・テーラードカーボンの基礎研究に従事 1999年 ノキア・ジャパン株式会社ノキアリサーチセンター入社 リサーチマネージャおよびプリンシパル・サイエンティストとしてプリンタブルエレクトロニクス、バイオマテリアルおよび5感通信技術の研究を行った 2008年 Invention Development Fundにて材料技術・環境技術・エネルギー技術担当ディレクターとして10年先を見越した技術開発テーマの策定と知財化を行った 2014年 株式会社アロマビット最高技術責任者
(株)Ristは、オムロン(株)との間に、オムロンの画像処理システム製品「FHシリーズ」の開発における協業基本合意書を締結した。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000064.000023649.html
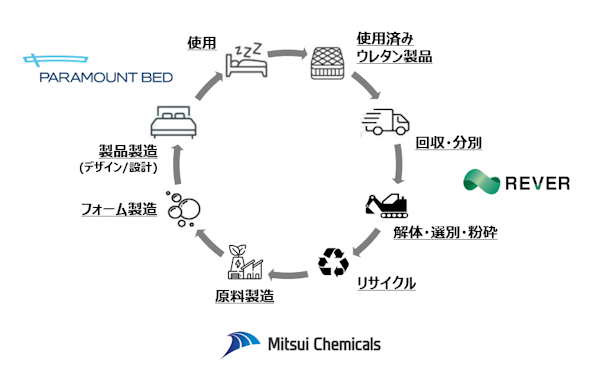
パラマウントベッド(株)、三井化学(株)、リバー(株)によるベッドマットレスに含まれるポリウレタンのケミカルリサイクルに向けた取り組みについて、環境省が公募している「令和5年度脱炭素型循環経済システム構築促進事業」※1のうち、「プラスチック等のリサイクルプロセス構築及び省CO2化実証事業」に採択された。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000030.000092263.html
(株)アバールデータは、近赤外線エリアカメラ「ABA-001MIR」を2023年9月より発売開始する。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000010.000059109.html
(株)東海理化は、川崎鶴見臨港バス(株)が代表幹事を務める、KAWASAKI新モビリティサービス実証実験協議会実施の「2023KAWASAKI新モビリティサービス実証実験」において、自動運転バスの実証実験に参画する。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000115.000088570.html