
アクセスサービスシステム研究所
脇坂 佳史
3. 通信用光ファイバを用いた測定事例
FDM位相OTDR装置を中心として、DASを使用し、通信用に敷設された光ファイバに加わった振動波形を可視化した事例を紹介する。
3.1 交通振動の可視化
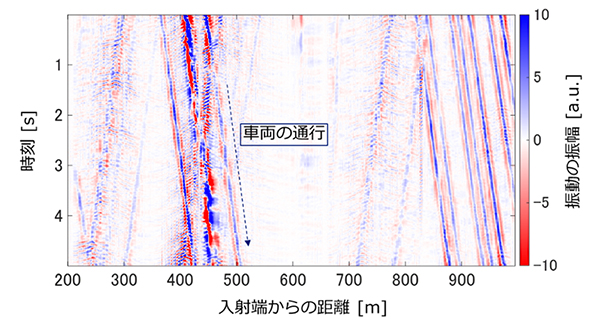
光ファイバが地下の管路を通っている区間では、地上の道路を通った車両の振動を可視化できる。図3-1にその結果を示す。一本の斜め線が1台の車両の通過に伴う振動波形に対応する。斜め線の傾きの正負と大きさから車両の進行方向と速度、振動の強さから車両の大きさ、斜め線の間隔や多さから車両の間隔や渋滞具合が推定できる。これら情報を活用することで交通整流の応用が期待できる。また、全体時な振動の大きさから路面状態の粗さ、特に局所的に振動が大きい地点ではポットホール(へこみ)の存在などが推定できる可能性もあり、道路インフラのメンテナンスといった応用も考えられる。
3.2 振動分布の実空間との対応付け(マンホールを利用する場合)
DASで可視化した交通振動などの測定データを有効活用するには、光ファイバの入射端からの距離(=waterfall図の横軸)が、実空間においてどの位置なのか、対応させることが必要である。例えば、図3-1の横軸のどの点がどの交差点になるのかといった情報を把握しておくことは、交通整流等の応用にも必要である。しかし、光ファイバケーブルのルート情報のようなデータベースの情報だけで実空間と対応させるのは難しい。なぜなら、通信用光ファイバは非常に長く、光ファイバケーブルのルート情報には反映されない余長(例えば接続箱周辺で光ファイバを巻いてループ状にしている部分)が複数存在し、データベースから割り出した情報と光ファイバ実長との間にはずれが生じるからである。
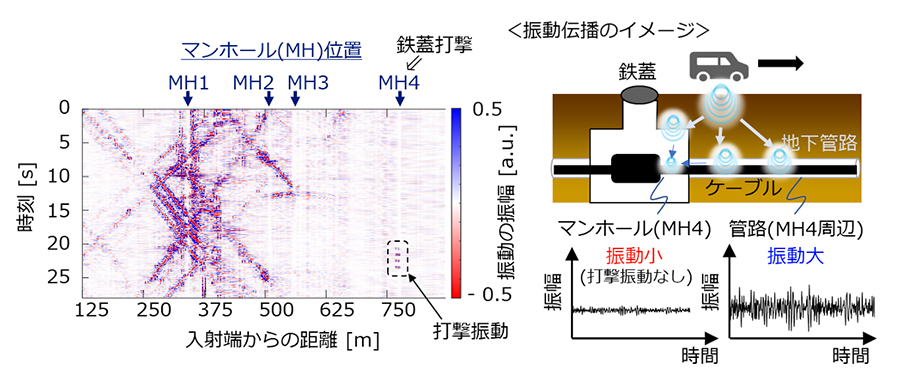
弊社では、DASのwaterfall図の横軸と実空間上での位置を対応させる方法についても検討を進めている。地下区間については、対応の要となるマンホールの位置を同定できれば良いことに着目し、現場での作業と組み合わせて検出する方法[3]と、そういった作業も無しに割り出す方法[4]の二つを提案した。前者は、マンホールの鉄蓋を打撃し、その振動をDASで検出することで、打撃したマンホール位置を同定する方法である。図3-2は、4つのマンホールを光ファイバが通過した地下区間でのwaterfall図(リアルタイムに取得)であるが、4番目のマンホール(MH4)の鉄蓋を打撃しており、その振動が確認できる。このような打撃振動は、必ずしも高感度とは限らない商用化したDAS装置でも区別が可能な一方で[3]、現場で作業する必要がある。現場作業を必要としない方法として、マンホール地点における振動(交通振動や常時微動)の大きさが他地点に対して小さくなる傾向を利用する方法も提案した。例えば、図3-2では、マンホール位置で振動の振幅が小さいことが確認できる。このような傾向に基づけば、振動強度の分析により、マンホール位置を同定することもできる。
3.3 架空ケーブルの揺れの可視化・電柱を利用した実空間との対応付け
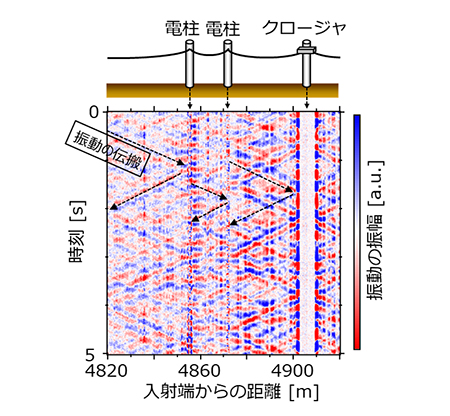
光ファイバが電柱間に敷設された架空区間では、風等による光ファイバの揺れの振動がDASにより可視化できる。架空区間の振動情報を有効活用する上でも、waterfall図の横軸と実空間での位置との対応付けが重要である。対応付けの要として電柱が利用できる。電柱のwaterfall図の横軸での位置を同定する方法として、マンホールの場合と同様に、電柱に振動を与える方法が考えられる。また、弊社では、位相OTDRとは原理が異なるが、より空間分解能が細かい測定方式を用いて、風による振動が伝播する様子(振動パターン)が電柱位置で切り替わることを見出した[5, 6]。そのような振動パターンの変化を解析して、電柱位置を同定することもできる。図3-3が実際に可視化された振動パターンである。位相OTDRでも同様の検討を進めている。こうした振動パターンの変化に着目すれば、振動強度から風等の強さが分かるだけなく、より詳細な情報も得られ、天候の観測ができる。また、ケーブルの揺れ方から、ケーブルの把持状態の異常検知の応用も考えられる。
4. まとめ
本稿では、通信用光ファイバをセンサ媒体として利活用し、DASによって振動分布を可視化することで、様々な環境情報を取得する光ファイバ環境モニタリングのコンセプトについて、測定原理や測定事例を交えて紹介した。DASを利用した環境モニタリングの実現に向けては、測定原理や測定事例の引き続きの検討に加え、DASが出力する大量の測定データの取り扱いやAI・機械学習等を活用したデータ分析・解釈に関する検討も必要である。そうした検討を積み重ねることで、本稿では紹介できなかった事例も含めて多くのユースケースを確立し、通信用光ファイバに新たな価値を付与し、様々な社会課題の解決に貢献したいと考えている。
参考文献
- D. Iida, Y. Wakisaka, T. Okamoto, N. Honda, H. Hiroyuki, IEICE Gen. Conf. 2019, B-13-10, 2019.
- H.Takahashi, Y. Wakisaka, C. Kito, T. Ishimaru, D. Iida, Y. Koshikiya, 27th International Conference on Optical Fiber Sensors, W4.32, 2022.
- T. Okamoto, D. Iida, Y. Koshikiya, N. Honda, Journal of Lightwave Technology, vol. 39, no. 21, pp. 6942-6951, 2021.
- 日本電信電話株式会社 ニュースリリース「世界初、通信光ファイバの感じる振動状態をセンサとして活用し、通信設備のモニタリング技術を実証」2021年9月27日,
URL:https://group.ntt/jp/newsrelease/2021/09/27/210927a.html.
【著者紹介】
脇坂 佳史(わきさか よしふみ)
日本電信電話株式会社 アクセスサービスシステム研究所 研究員
■略歴
2016年 東京大学大学院理学系研究科化学専攻 修士課程修了。2017年 日本電信電話株式会社 入社。アクセスサービスシステム研究所にて光ファイバセンシング技術の研究開発に従事。
交流磁界分布の可視化技術(2)

システム工学群電子・光システム工学専攻
准教授
田上 周路
4. 交流電流によって生じる磁界分布と信号源位置推定
実験系の概略図を図5に示す.セシウムD2線(852 nm)に調整されたDistributed feed-back (DFB) laserから照射された光はコリメートされた後に円偏光されてガラスセルを透過させた.ガラスセルを透過した光はDMDのミラーアレイ面にレンズを用いて結像され,画素要素となる領域の反射光のみフォトディテクタ(PD)に受光される.PDによって得られた各画素要素の信号はロックインアンプ (LIA)によって位相敏感検波され,測定対象となる磁界の周波数成分のみを抽出した.さらに,直交する2位相を分離することで感度を有する2方向の成分を分離した.地磁気と静磁界B0の調整には3軸ヘルムホルツコイルを用いた.測定対象となる磁界には,直径0.5 mmの極細導線を用い,信号発生器 (FG)に接続することで70 kHz, 10 mAの交流電流を印加し,導線周囲に発生する交流磁界の測定を行った.
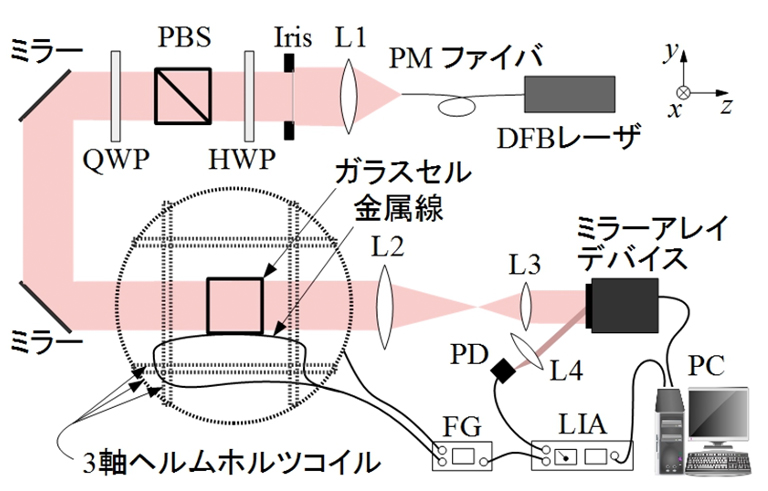
図6に測定中のガラスセルと貼り付けられた金属線の画像を示す.ガラスセルの上部に薄膜化したセシウムが確認できるが,光が透過する磁界測定領域は薄膜の無い透明な空間であり直径10 mmの円形の光を照射した.導線は光照射領域の真横に光軸と平行となるように貼り付けた.
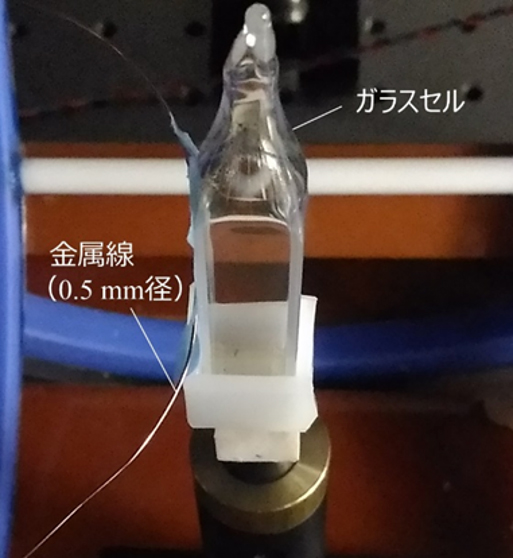
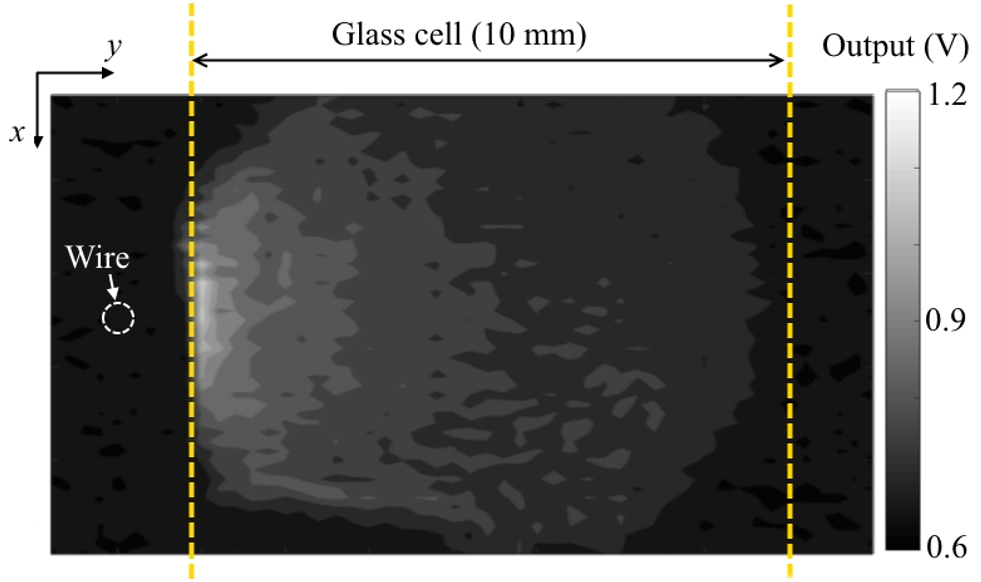
図7にDMDの画素要素を50×50に分解して得られた磁界強度の分布画像を示す.黄色い2本の破線がガラスセル内壁を示し,それらに囲まれた領域内部の円形部分が光透過領域であり磁界センサとして動作している.金属線の位置は白い点線の円で示しており,金属線に近接する位置で信号強度が増加している.この磁界分布画像を用いて信号源の位置推定を行った結果,ガラスセル内壁よりy軸方向に−1.41 mmと推定され,実際の金属線の内部を示した 5).
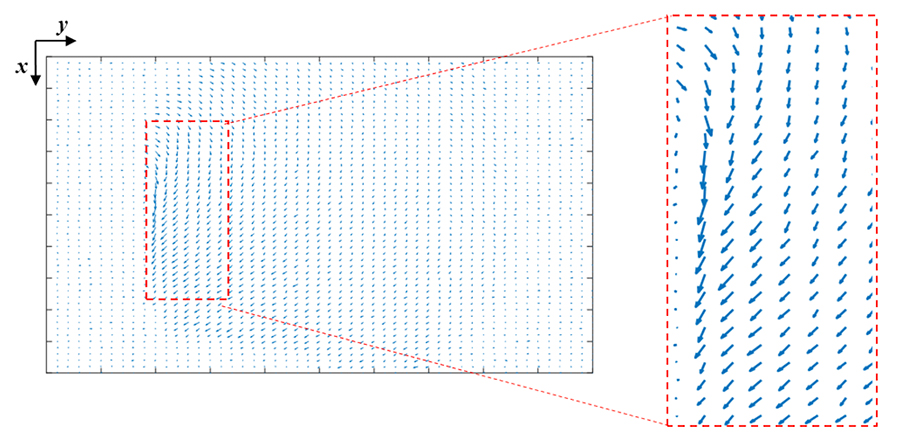
次に,LIAによって分離された直交する2位相成分について解析を行った.感度を有するx軸とs軸の磁界方向成分に分離し,s軸方向の強度をy軸方向の強度に換算し, x軸とy軸方向成分のベクトルマップとした結果を図8に示す.金属線を中心として,アンペールの法則で知られる同心円上の磁界が金属線付近で大きく,距離につれて減衰していることが確認できる.
5. シングルピクセルイメージングの適用
磁界分布の画像化において,より高い空間分解能での測定は磁界分布の評価制度の向上に繋がる.DMDを用いて空間分解能を向上させるには画素要素のサイズを小さくする必要がある.しかし,フォトディテクタへ入射される光強度は画素要素サイズに比例するため,高空間分解能化によるS/N比の低下が画像化の妨げとなる.そこで,DMDにランダムパターンや構造化パターンを次々と表示させ,そのパターンに対する信号強度との相関から画像化を行うシングルピクセルイメージング(SPI) 6) を適用させる.SPIを適用させることでガラスセルを透過した光強度のうち,理論的には約半分の光強度がDMDから反射されてPDで受光される.このため,画素要素をスキャンさせる方法に比べてS/N比の向上が期待できる.
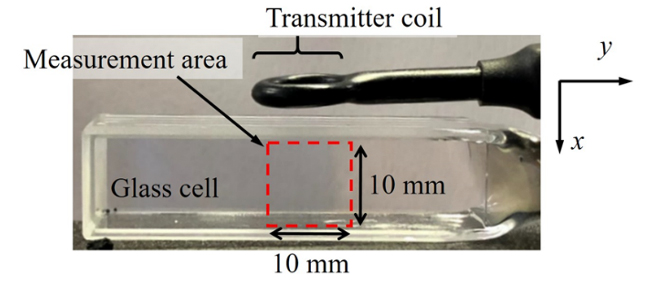
SPIの有効性を実証するため,画素要素のスキャンとSPIとの画像化比較を行った.図9にセンサ部分の写真を示す.測定対象には,直径10 mmのコイルをガラスセル上方に配置し,FGに接続することでコイルから発生する磁界分布を赤い点線の領域で測定した.測定回数は画素数と同じとし,SPIには画素数と同じ数のhadamard行列に基づくパターンをDMDに表示させて画像を再構成した.測定結果を図10に示す.図10(a)と(c)は画素数32×32でのスキャンとSPIによる画像をそれぞれ示しており,どちらも上方のコイルから発生した磁界強度が下方に行くにつれて減衰している.同様に,図10(b)と(d)は画素数64×64でのスキャンとSPIによる画像をそれぞれ示しており,スキャンでは受光強度の低下によって画像化できないが,SPIでは上方から下方にかけて磁界強度の減衰分布が確認できる.
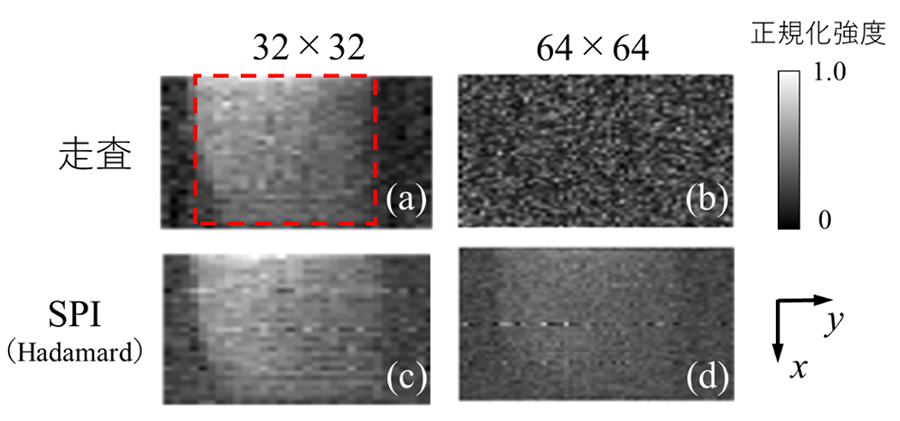
SPIによる効果は受光強度の増大によるS/N比の改善だけでなく,環境磁場ノイズへのロバスト性がある.測定時における地磁気の変動や近傍の電子機器からの低周波ノイズに対して,スキャンでは走査方向に線状のノイズが画像に重畳されるが,SPIでは影響が低減されることを実験によって確認している.さらに,圧縮センシングの技術を取り入れることで,測定回数を低減しても良好な画像を取得できることを実験によって実証している.
6. おわりに
本稿では,光ポンピング磁界センサとDMDを用いて,サブミリメートルの空間分解能を有する磁界分布の可視化技術について簡単な実験結果を交えて紹介した.本手法は光の非侵襲性と並列性を利用した可視化技術であり,漏洩磁場計測や非破壊検査といった産業応用だけでなく,磁気微粒子の位置検出といった医療応用へも利用できる.今後ガラスセルの大型化やセンサの多点化,コイルプローブとの併用などによって,より広範囲で高精度そして高速な磁界分布の可視化が期待される.
参考資料
- S. Taue and Y. Toyota, “Signal-source estimation from magnetic field image obtained using atomic magnetometer and digital micro-mirror device,” Opt. Rev., vol.27, pp.258–263, 2020.
- https://optronics-media.com/publication/%E8%8B%A5%E6%89%8B%E7%A0%94%E7%A9%B6%E8%80%85%E3%81%AE%E6%8C%91%E6%88%A6/20170403/46219/
【著者紹介】
田上 周路(たうえ しゅうじ)
高知工科大学システム工学群電子・光システム工学専攻 准教授
■略歴
- 2005年学位取得 博士(工学)(徳島大学)
- 2005年広島大学非常勤職員(産学連携センター) 講師
- 2007年京都大学有期雇用教職員 工学研究科・研究員
- 2009年京都大学先端医工学研究ユニット 特定助教
- 2011年岡山大学大学院自然科学研究科電子情報システム工学専攻 助教
- 2018年高知工科大学システム工学群電子・光システム工学専攻
光コム・デジタルホログラフィーによる高ダイナミックレンジ表面形状測定 Wide dynamic range three-dimensional shape measurement based on synthetic-wavelength digital holography using optical frequency comb(2)
【 徳島大学・ポストLEDフォトニクス研究所 】

時実 悠南川 丈夫安井 武史
3. 実験装置
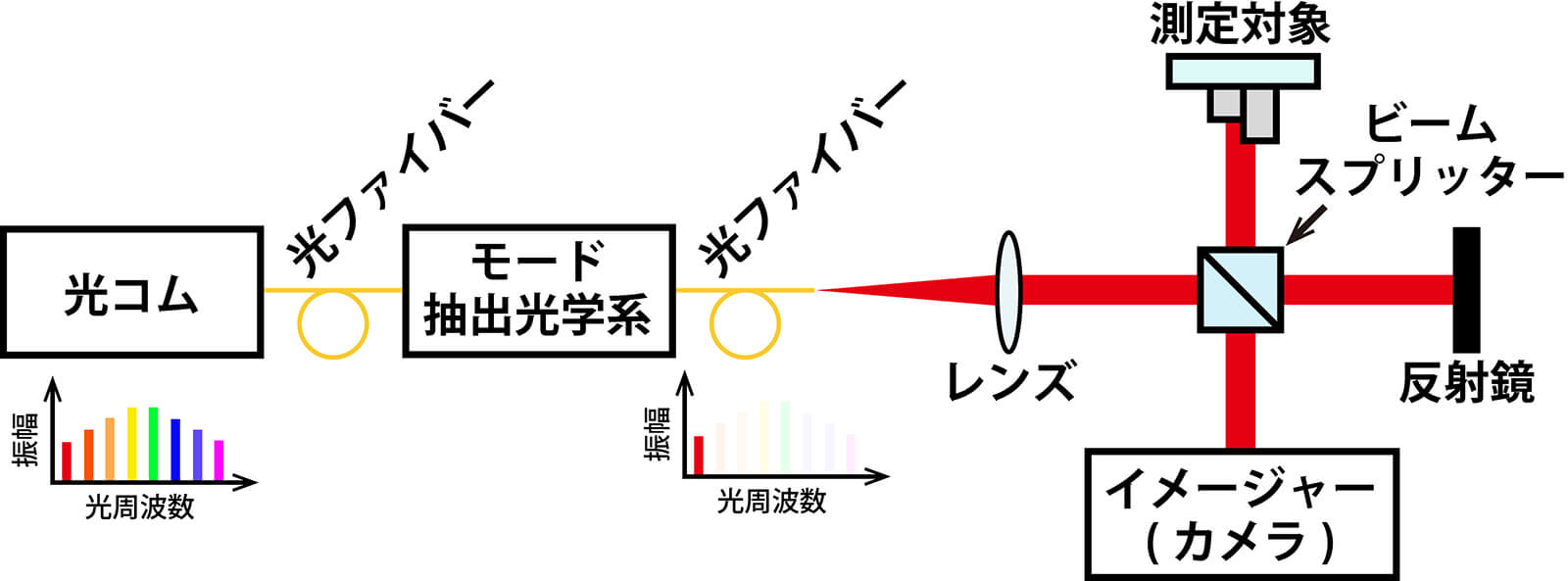
図3に実験装置の概略図を示す.大まかには,光源部分,単一コムモード抽出のための光学部分,およびデジタルホログラフィーの光学系部分に分かれる.まず,光源部分では,隣接するコムモードの間隔を広く設定できる結果(周波数間隔 frep = 10 GHz,波長間隔 = 0.08 nm),単一波長抜き出し(分離)が比較的容易となる電気光学変調器を用いた光変調技術に基づく光コム光源を用いた.本光源は光通信に用いられる波長帯であり,デュアル・マッハツェンダー型変調器と高非線形分散シフトファイバーの利用により,光強度スペクトル波形が平坦で(それぞれのコムモードの光強度が等しい), 1540 nmから1570 nmの帯域において約300本のコムモードが利用可能である 2).単一コムモード抽出の光学系に関して,我々の研究グループではこれまでに,抽出速度が比較的高速であるが光学的なスループットが犠牲になる方法 3)と,その反対に低速であるが高スループットでSN比(信号対雑音比)の高い方法 4)の2つを用いている.前者はそれぞれの異なる波長を異なる2次元空間に展開する波長-2次元空間変換素子(VIPA(Virtually imaged phased array)と回折格子の併用)と空間光変調器の組み合わせから成り,後者は光通信波長帯における市販の狭線幅バンドパスフィルターから成る.今回の実験結果では後者の方法を用いて得られた結果を後に記述する.
最後に,デジタルホログラフィーの光学系・解析法の種類も様々であるが 5),我々のグループではオフアクシス(非共軸)型のマイケルソン干渉計と角スペクトル法による再構成(回折)計算の組み合わせを採用し,1枚の干渉縞画像から位相画像(および振幅画像)を再構成できる実験システムを用いた.測定対象から回折してきた光と,参照光として利用する反射鏡から反射した光による干渉縞(ホログラム)は近赤外カメラによって検出され,抽出波長を変えながらこの計測を繰り返す.実際には300本のコムモードを用いて299通りの合成波長を生成することにより,最長で30 mmの合成波長が利用可能な位相画像接続型の多波長デジタルホログラフィーを実現した.
4. 実験結果
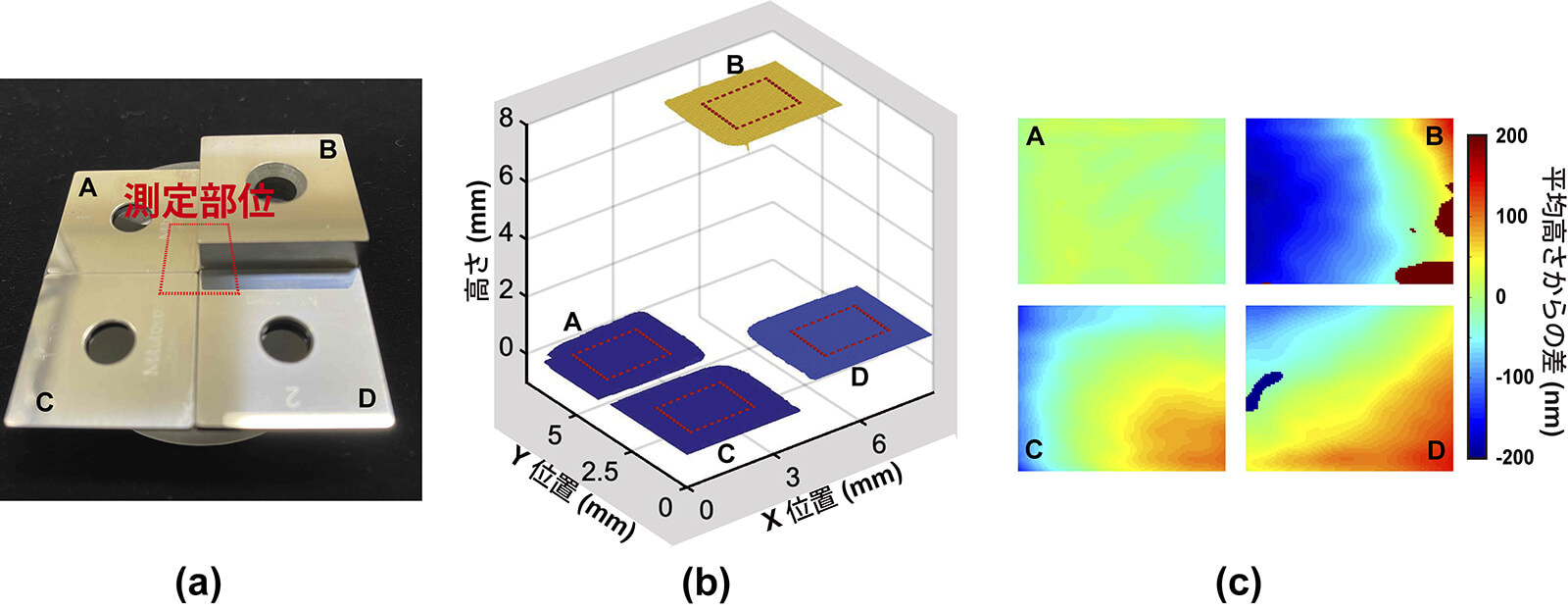
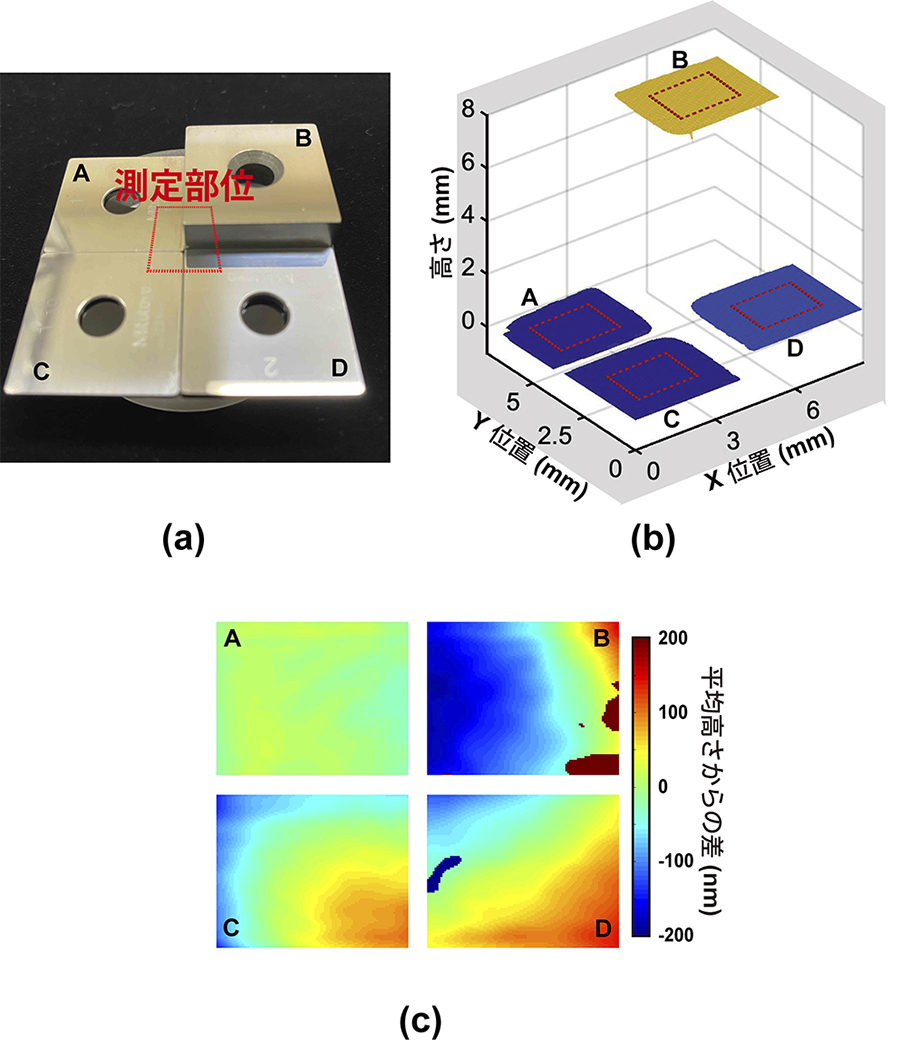
図4に本手法を用いて得られた実験結果を示す.計測の対象として,厚さの異なる4つの金属製ブロックゲージをオプティカルフラット上にリンギングにより密着させたものを用いた.図4(a)に示すように,それぞれA: 1.0000 ± 0.00014 mm,B: 8.0000 ± 0.00014 mm,C: 1.100 ± 0.00014 mm,D: 2.0000 ± 0.00014 mmの厚さである.この対象を光コムデジタルホログラフィーにて計測する際に,すべてのブロックゲージを計測できるよう図4(a)赤破線枠にレーザー(光コムの各モード)を照射し,3次元再構成した結果を図4(b)に示す.この画像から,計測に用いた光の波長を大きく超えるような数mmオーダーの形状を計測できていることがわかる.この結果を定量的に評価するため,得られた結果から各段差の大きさを計算し,ブロックゲージのカタログ寸法と比較する. A-B間,A-C間,C-D間,B-D間の4つの段差について,それぞれ7.0028 mm ± 0.0725 µm,0.1000 mm ± 0.0831 µm,0.9002 mm ± 0.0766 µm,6.0025 mm ± 0.0661 µmという計算結果が得られ,寸法とよく一致していることが確認できた.
最後に図4(b)の3次元像における各面(各段)の赤破線枠を抽出したものを図4(c)に示す.画像の色は平均高さからの差を示しており,その表示スケールは± 200 nmである.B,C,およびD面ではリンギングによる密着の不完全性に起因すると予想される傾き(縞)が発生しているが,密着が適切に行われていると予想されるA面ではフラットな形状が得られており,この領域の標準偏差を計算したところ数十nm程度であった.この値を計測の下限(分解能)として定義し,上限を決定する合成波長は数十mmであったことからダイナミックレンジは106となり,本手法を用いれば高ダイナミックレンジ性を確保した表面形状の計測が可能となることが確認できた.
5. まとめ
本文献では光コムの各コムモードを利用した多波長デジタルホログラフィーにより,3次元表面形状情報を得られる位相画像計測におけるダイナミックレンジの大幅な拡大が可能であることを示した.一方,現状の実験装置は原理実証を目的とした構成となっていることから,実際の産業への応用に関しては時間分解能,面内視野サイズ,あるいは鏡面以外の対象の計測などの観点からの再検討余地がある一方,各種の最適化や高度化によって業界の要望・要求に近づけられると考えている.機械加工については今後も益々の技術進展により高精度化が進んでいくものと予想されるが,これに対応するためには,高いダイナミックレンジでかつ機械的な機構を有さない本手法は有望なツールの一つであり,上記進展に並走あるいは先立って高機能な計測手法を確立することは重要な課題であると考えられる.
参考文献
- I. Morohashi et al., “Widely repetition- tunable 200fs pulse source using a Mach–Zehnder-modulator-based flat comb generator and dispersion-flattened dispersion-decreasing fiber,” Opt. Lett. 33, 1192 (2008).
- E. Hase et al., “Multicascade-linked synthetic-wavelength digital holography using a line-by-line spectral-shaped optical frequency comb,” Opt. Express 29, 15772 (2021).
- E. Hase et al., “Nanometer-precision surface metrology of millimeter-sized stepped objects using full-cascade-linked synthetic-wavelength digital holography using a line-by-line full-mode-extracted optical frequency comb,” Opt. Express 31, 18088 (2023).
- S. Ulf and W. Jueptner, Digital Holography (Springer, 2005).
【筆頭著者紹介】
長谷 栄治(はせ えいじ)
徳島大学 ポストLEDフォトニクス研究所 特任助教
⟨ 略歴 ⟩
1989年生まれ.2017年,徳島大学・大学院先端技術科学教育部知的力学システム工学専攻博士後期課程修了,博士(工学).2017年,高輝度光科学研究センター・利用研究促進部門,研究員.2019年,徳島大学・ポストLEDフォトニクス研究所,特任研究員を経て特任助教.現在に至る.
【著者紹介】
時実 悠,南川 丈夫,安井 武史
徳島大学 ポストLEDフォトニクス研究所
Starlinkを利用した、リアルハプティクスによる「感触の伝わる遠隔操作」の技術を提供
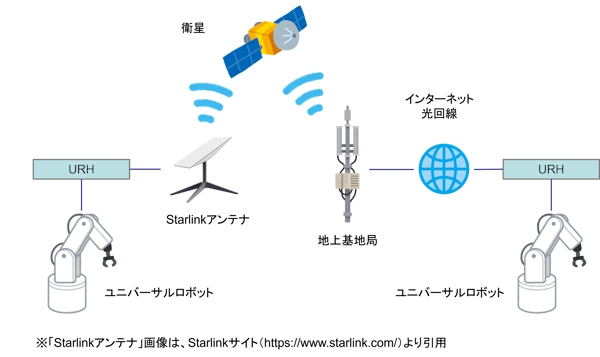
モーションリブ(株)は、衛星通信サービスStarlink(※1)と同社のリアルハプティクス(※2)による遠隔操作ソリューションを連携することで「感触の伝わる遠隔作業」を可能とする技術の開発に成功し、提供を開始した。建築土木、農業、林業などのインターネット網を構築しにくい屋外の環境下でも遠隔作業が利用可能となった。
同社は、危険作業の遠隔化による安全な就労や、身体障害などで移動に制限がある方も自由な就労/生き方ができる世界を目指し、「協働ロボット用感触伝送遠隔操作ユニット(以降、URH)(※3)」をはじめとした、リアルハプティクスによる遠隔操作ソリューションを提供してきた。
今回、同社は衛星通信サービスStarlinkを利用して、屋外やルーラルエリアといったインターネットが整備されていない環境下でも「感触の伝わる遠隔作業」を可能とする技術の開発に成功した。Starlink通信環境の屋外拠点と光通信回線の屋内拠点間において各拠点の協働ロボット同士を遠隔操作し、土木作業や農作業を模した実証実験を行い、良好に作業ができることを確認した。
これまで、遠隔地にリアルな感触を伝送するためには、5Gや高速インターネット通信網と言った整備されたインターネット網を必要としてきたが、今回開発された技術を用いることで、インターネット網の構築に課題を持つ環境においても繊細な感触を伝送し、操作者が移動することなく遠隔地のロボットを操作して様々な作業を行うことができる。
また、この技術は協働ロボットのみならず、建設機械、農業機械や産業用装置など様々な装置への応用が可能であり、建築/土木または農業といった、現場でのインターネット網の構築が難しい業界での利用が期待される。
今後もモーションリブは「世界に、やさしいチカラを。」を合言葉に、機械やロボットがやさしい力で人の生活に溶け込み、必要なときに適切な力加減をそっと提供できるような社会を、リアルハプティクスの技術を通じて実現していくとしている。
※1 Starlinkとは、スペースX社が開発した衛生ブロードバンドインターネットサービス。Starlinkは、スペースX社の登録商標。
※2 リアルハプティクスとは、慶應義塾大学で発明された、人の力加減や物の感触を正確に遠隔地に伝送できる制御技術。リアルハプティクスはモーションリブの登録商標。
※3 協働ロボット用遠隔操作ユニット(URH):ユニバーサルロボット(※4)を2台使った、6自由度の有線遠隔操作システム。最先端の感触制御技術リアルハプティクスを使用しており、ユニバーサルロボットが接触したモノの感触や、操作する人の力加減が遠隔地にリアルに伝わるため、触覚が必要な繊細な作業でも遠隔化することができる。 製品サイト:https://www.motionlib.com/product/urh/
※4 ユニバーサルロボットは、Universal Robots A/S社の登録商標。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000031.000027265.html
ALANコンソーシアム、水中事業の実現を目指すベンチャー設立と新技術

ALAN(Aqua Local Area Network)コンソーシアム(代表:島田 雄史)は、日本が世界をリードしている水中光技術の活用を通じて新市場の創出や社会課題の解決に向けて活動している。
この度、海洋・海中を代表とする水中環境において、新コンセプトの水中センサロボットを駆使し、新たな水中事業の実現を目指す「アクアジャスト株式会社」を設立及び本コンソーシアムの活動成果を発表した。
また、今回の発表内容については、CEATEC 2023において一般社団法人日本水中ドローン協会との共同出展及びALANフォーラムと題したコンファレンスにて紹介する。
■コンソーシアム発ベンチャー会社概要
会 社 名:和名)アクアジャスト株式会社 英語名)AQUADJUST Co. Ltd.
設 立:2023年2月6日
役 員:代表取締役CEO 島田 雄史(しまだ・たけし)
H P: https://www.aquadjust.com/
□事業内容:
海洋・海中を代表とする水中環境に適した水中センサロボットをプラットフォームとして、水中リアルモニタリングシステムを構築する。システムより取得したデータの運用やデータを活用したサービスを行い、水中環境下の大容量データ伝送を実現すべく水中光無線通信も手掛ける。
また、センサ・通信に関しては、光だけではなく、音波、電磁波、カメラ等の技術とのマッチング・ミキシングを行うことによって水中環境のDX化を推進する。
□設立経緯:
本コンソーシアムでの5年間の活動を通じて、メンバーらは「水中環境の定量化・リアルモニタリング」の必要性を見出すと共に、それに特化したセンサロボットをプラットフォームとして、常に海洋・海中を代表とする水中環境下での実証を行わねばならないことを痛切に感じた。本コンソーシアム内においては、水中 ToF LiDARによる計測システムの開発や超高速水中光無線通信の実証には成功はしているが、その一方で今後の社会実装に向けては、音波、電磁波、カメラ等の技術とのマッチング、ミキシングについて実証や検証が必須となるという。
■コンソーシアム活動成果発表
ALANコンソーシアムは発足から5年間の活動成果としてALANレポートの作成を行った。本レポートはコンソーシアムの活動、水中・海中という次世代の経済圏の実現に関わる水中光技術に関して想定している産業と応用領域、技術動向、市場予測などについて詳細に説明し、専門家の知識に基づいて執筆されている。レポートを通じ、水中光技術(特にLiDAR・光無線通信・光無線給電)や、水中ロボティクスなどの技術動向の共有や社会実装に必要なニーズ等の情報共有、これに関する研究開発等の成果の情報発信を通じて、社会の理解促進や市場の活性化を期待しているとのこと。
■世界初の「水中フュージョンセンサ」技術を紹介
本コンソーシアムでは、水中をモニタリングするために光無線技術のLiDARをコア技術として研究してきた。現在、水中のモニタリングをより一層図るため、LiDARとカメラを組み合わせた新技術の開発がトリマティス(株)にて進行している。本技術は従来にはなかった、RGB三色レーザ搭載LiDARの使用と LiDARとカメラの同時搭載かつハード的に融合しているという点で世界初の技術となっており、現在この「水中フュージョンカメラ」技術について特許出願をしている(画像)。
現在はセンサによって取得したデータを複雑な画像処理推定技術によって元の色合いの復元を行っているが、これによる精度と処理時間の課題を本技術によって解決することが可能となる。11月より顧客と実証実験開始を予定している。
今後は、各業界各ユースケースでのデータをもとに水中フュージョンセンサ市場の拡大を目指すとしている。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000004.000079043.html
【産業用ミリ波レーダー】”安全認証を取得した3D安全センサ“をFUJIグループが自社開発。
(株)FUJIは、グループ会社である(株)エデックリンセイシステムと共同で協働ロボットの生産性向上に貢献する、国内初(*1)となる安全認証を取得した3D安全センサー『AcroSensor』(アクロセンサー)を開発した。同センサーを製造・販売するエデックリンセイシステムでは、本日よりサンプルの提供を受け付け、11月初旬から受注を開始する。
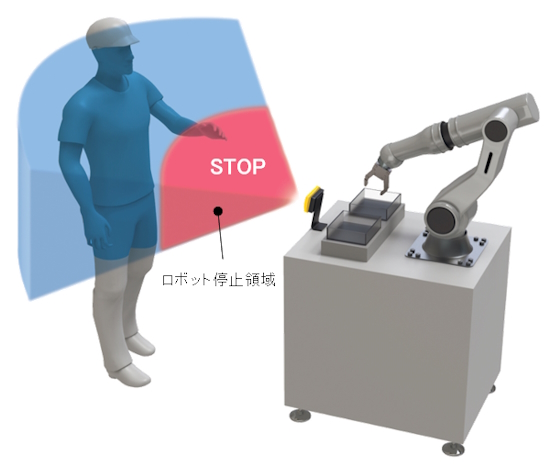
『AcroSensor』は、国内では初めての“安全認証を取得した3D安全センサー”(*1)です。ミリ波レーダーを活用した3D検知技術を用いることで協働ロボットに接近した人を適切な距離で検知するため、従来方式(*2)の安全センサーに比べてロボットが停止する領域(ロボット停止領域)を狭く設定することができる。協働ロボットの安全センサーとして用いることで、人がロボットに接近した際に検出される過剰な一時停止(チョコ停)を減らし、ロボットの生産性向上に貢献する。
■開発の背景
人手不足が深刻化する製造現場にて導入が進んでいる協働ロボットにおいて、柵がない状態でも安全を確保してロボットを速く動かすためには、人の接近を検知する安全センサーが必要となる。
一般的な安全センサーには2D方式のレーザースキャナーが用いられているが、この方式は人の手先の接近までは検知できない。したがって、安全確保のためには、人が手を伸ばしたときの距離などを考慮した広範囲をロボット停止領域として設定する必要がある(*3)。ロボット停止領域が広範囲にわたると、その領域への人の侵入確率が上がるためロボットのチョコ停が発生しやすく、生産性が低下する要因となっている。そこで、協働ロボットの生産性向上を目指して3D方式のミリ波レーダーに独自の探知アルゴリズムを加えた『AcroSensor』を開発した。
*1:自社調べ。IEC61496、IEC62061の規格認証(SIL2)を取得した製品化された3D安全センサーとしては国内初。
*2:安全センサーとして用いられる2D方式のレーザースキャナーを用いた手法を意味する。
*3:レーザースキャナーなどの人体を検知する安全センサーを設置する場合、人体が検出領域に侵入し、危険部に到達する前に機械が停止するために必要な最短距離がISO13855等の規格により規定されている。
■『AcroSensor』の特長
新たに開発した『AcroSensor』は、人の胴体ではなく手先を3Dで検知することで、レーザースキャナー使用時よりもロボット停止領域を狭く設定することができる。また、『AcroSensor』は、国内では初めての“安全認証を取得した3D安全センサー”であり、IEC61496, IEC62061の規格認証(SIL2)を取得した安全センサーとして使える。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000020.000101249.html
ボディ制御の簡略化に貢献 CAN FDおよびLIN内蔵の車載用パワー・マネージメントIC
STマイクロエレクトロニクスは、車載用パワー・マネージメントIC「SPSB081」を発表した。同製品は、メインの固定電圧出力のLDO(低ドロップアウト)レギュレータ、プログラム可能なセカンダリLDOレギュレータ、4つのハイサイド・ドライバ、CAN FDトランシーバ(※1)、オプションのLINトランシーバ(※2)など、さまざまな機能を備えている。また、きわめて低い静止電流のスタンバイ・モードを複数備えており、プログラム可能なローカルまたはリモート・ウェイクアップによって消費電力の最小化に貢献する。
SPSB081に内蔵された電源およびトランシーバは、サンルーフやシート、リア・ゲート、ドア、照明モジュール用の車両ボディ制御システムの設計簡略化に貢献する。適応性に優れているため、ゲートウェイや冷暖房空調制御システム、パッシブ・キーレス・エントリ・システム、テレマティクス制御ユニット、制御パネルにも最適。
さらに、フェイルセーフ信号用の診断出力ピンなど、豊富な保護機能が内蔵されている。そのため、安全性の高いハードウェア要素として設計されていない場合でも、ISO 26262に準拠した機能安全要件の満足が求められるアプリケーションにも対応可能。すべての出力に、過電流保護およびオープン負荷検出が搭載されている。1次(固定電圧)LDOレギュレータは、過電圧保護、過熱保護回路を搭載し、2次(プログラム可能)LDOレギュレータは、過負荷、過熱、短絡、逆バイアスの保護機能を搭載している。いずれも起動時の接地との短絡のモニタリングと、レギュレータ故障の連続的なモニタリングを備えている。
SPSB081は、AEC-Q100規格に準拠し、動作温度範囲は-40℃~+150℃、最高動作温度が175℃である。全品種が量産中で、熱効率に優れたQFN32Lパッケージ(5 x 5 x 1mm)で提供される。単価は、1000個購入時に約1.80ドル。
(※1) CAN FD: コントローラ・エリア・ネットワーク・フレキシブル・データレート(ISO 11898-2/2016、SAE J2284準拠)
(※2) LIN: ローカル・インターコネクト・ネットワーク(ISO 17987-4/2016準拠)
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000001330.000001337.html
AI潅水施肥システムのゼロアグリ、SDGsを意識した野菜ブランドの実証販売を開始

(株)ルートレック・ネットワークスは、同社が開発しているAI潅水施肥システム「ゼロアグリ」を導入している生産者が作った野菜のブランド「美やさい」を立ち上げた。水と肥料をコントロールし、品質高く、節水や化学肥料削減に配慮して栽培した野菜を「美やさい」とし、今後ECサイトや大手スーパー等にて販売をする予定で。10月14日にはヒルズマルシェ(※1)にて実証販売を開始する。
※1 2009年9月より開始された都内でも老舗のマルシェの1つ。毎週土曜日にアーク・カラヤン広場にて開催中。 (アークヒルズ全体のイベント時等、時間を変更する場合有り。)
参考URL:https://www.arkhills.com/hillsmarche/
●経緯
ルートレック・ネットワークスが開発を行うAI潅水施肥システム「ゼロアグリ」は、パイプハウス向けのスマート環境制御機器として、全国で370台以上が導入されており、作物の品質向上、収量向上、生産者の方の生産性向上に貢献している。今後スマート農業機器の活用メリットの向上や普及、認知度向上をより強化していく上で、作物の生産プロセスのみならず、販売面でも生産者をサポートしていくことが重要である。
また昨今では、農水省が掲げる「みどりの食料システム戦略」により、農業においてもCO₂排出削減を意識した栽培手法が重要視されているが、販売された野菜に対する消費者の環境問題の意識はまだ高くないのが現状である。
そこで同社は、スマート農業機器を活用して生産した品質の高い野菜をブランド化し、高品質の野菜を求めるお客様と生産者を結びつけることで、消費者に対してスマート農業や農業における環境問題のアピールを行うと共に、品質の高い野菜を安心して買ってもらうことをめざし、地球にやさしい、美味しい野菜「美やさい」として実証販売を開始する。
●今後の展開
(株)クボタがグループ社員や日本生命の社員を対象に展開する産地直送通販サイト「クボタべっぴんファーム(※2)」で先行販売を行っている。今後2023年10月14日のヒルズマルシェでの実証販売に加え、高付加価値型のスーパー等での販売展開をしていく予定。
※2 参考URL:https://www.kubota.co.jp/news/2023/management-20230227.html
ニュースリリースサイト:ttps://prtimes.jp/main/html/rd/p/000000023.000060692.html
オンセミ、スマートホームおよびオフィス向け 最も低消費電力のイメージセンサ
Hyperlux LPイメージセンサでバッテリ寿命の最大40%延長が可能に*1
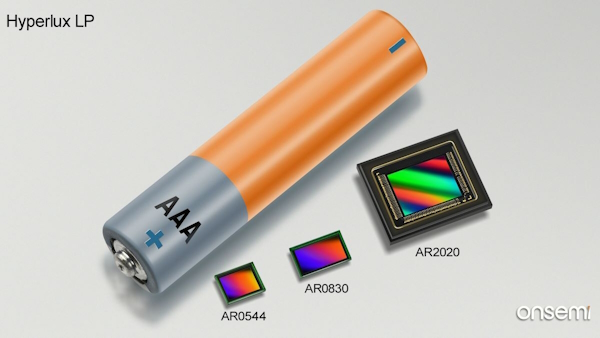
オンセミは、スマートドアベル、セキュリティカメラ、AR/VR/XRヘッドセット、マシンビジョン、ビデオ会議などの産業用および業務用カメラに最適な「Hyperlux LP」イメージセンサファミリを発表した。これらの1.4μmピクセルセンサは、業界をリードする画質と低消費電力を実現すると同時に、厳しい照明条件下でも鮮明で活力ある画像を撮影できる高い性能を達成しているとのこと。
また、この製品ファミリはフットプリントを最小限に抑え、最小では米粒大に近いサイズになるスタックドアーキテクチャ設計を採用しており、サイズに制限のある機器に最適。ユースケースに応じて、5メガピクセルの「AR0544」、8メガピクセルの「AR0830」、20メガピクセルの「AR2020」から選択できる。
ホームおよびビジネスオーナーは、自衛のために他のいかなるセキュリティ対策よりも、カメラそのものを選択する傾向があり、カメラ市場は2030年までに3倍になると予想されている*2。その結果、消費者は全体的なユーザーエクスペリエンスを向上させるために、より優れた画質、信頼性、長いバッテリ寿命を提供するデバイスを求めている。
これらのイメージセンサにより、カメラは厳しい天候や照明条件でも、鮮明な画像とより正確な物体検出を行うことができる。また、これらのカメラは、バッテリの交換や充電が困難な場所に設置されることが多いため、低消費電力が重要な要素となっている。
●「Hyperlux LP」ファミリは、以下のような性能や解像度を最適化する機能および独自技術を搭載している。
・ウェイク・オン・モーション – フルパフォーマンスモードでの所要電力の数分の1しか消費しない、低消費電力モードでのセンサ動作が可能。センサが動きを検出すると、写真を撮るよりも短時間で高性能状態に移行する。
・スマートROI – 2つ以上の関心領域(ROI)を識別し、縮小帯域幅のシーンおよびオリジナルディテールでの個別ROIのコンテキストビューを与える。
・近赤外線(NIR)性能 – 革新的なシリコン設計とピクセルアーキテクチャにより、最小限の補助照明で卓越した画質を実現。
・低消費電力 – 画質に影響を与える熱ノイズを低減し、ヒートシンクを不要にし、ビジョンシステム全体のコストを削減する。
「Hyperlux LP」イメージセンサファミリは、2023年第4四半期に発売予定。
*1 特定の条件下で実施された内部テストに基づく。実際の結果は、デバイス、使用パターン、その他の外的要因によって異なる場合がある。
*2 Status of the CMOS Image Sensor Industry, Yole Intelligence Report, 2023
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000277.000035474.html
鹿島建設、交通事故ゼロ社会へ スマートロードの開発に着手
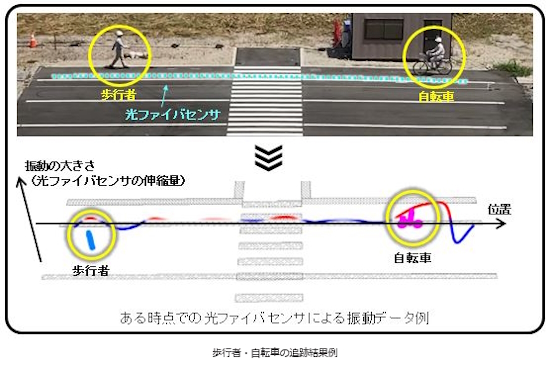
鹿島建設(株)は、トヨタ自動車(株)、(株)NIPPO、東京都市大学、カリフォルニア大学バークレー校と共同で将来の新たなモビリティサービスの提供や自動運転社会の到来を見据え、センシング機能を有する道路、スマートロード※の開発に着手した。このたび、同社の技術研究所(東京都調布市)敷地内に光ファイバセンサを埋め込んだ試験舗装フィールドを構築し、道路上の歩行者や自転車などの移動体の位置を、同センサで検知したデータにより自動追跡できることを確認した。
※スマートロード:ICT・DXによって、安全・安心な通行確保、効率的な交通管制など高度利用が実現された道路
開発の背景
近年の多様化するモビリティサービスを受け、交通事故の撲滅など安全な社会の実現に向けたカメラやLiDAR※などの活用が進められている。しかし、これら先行技術には、雨や霧などの天候による影響、プライバシーの保護、物陰に隠れた移動体への対応などの課題がある。光ファイバセンサはこれらの技術課題を解決でき、安全性を高められるだけでなく、圧倒的に広い範囲を面的にセンシングできるためコスト低減効果もある。
今回、構造解析技術やデータ処理技術を有する東京都市大学関屋准教授とカリフォルニア大学バークレー校曽我教授、モビリティ技術を有するトヨタ自動車、舗装技術を有するNIPPOの研究チームに、同センサによるインフラ構造物の計測・評価技術を有する鹿島が加わり、新時代のモビリティに対応できるスマートロードの開発に向けた研究体制を構築した。
※LiDAR:レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術
技術の概要
光ファイバセンサは、30km以上にも及ぶ距離にわたって、どこに振動やひずみ(伸縮)が発生しているか、その位置と大きさを捉えることができる。今回、幅10m、長さ20mの本試験フィールドにおいて、5本の同センサを、それぞれ異なる深さに埋め込んだ。道路に埋め込まれた同センサには、道路上を移動する歩行者や車両から生じたわずかな振動が伝わるため、振動の伝播状況を詳細に把握できる。2022年4月から1年間、外気温など環境条件が変化するなかでデータを蓄積し、同センサで検知した歩行者や自転車からの振動データを解析した結果、その位置や進行方向を自動で追跡できることを確認した。
このことから、本技術を発展させることにより、見通しの悪い交差点や悪天候下においても歩行者や車両などをあらかじめ認識する安全性の高いモビリティサービスの構築が可能となり、自動運転社会の実現に貢献することが期待できるという。
現在、共同研究先と連携しながら、同フィールドを活用し、歩行者や自転車の振動データのパターンの解析にAI技術を活用するなどして、複数の異なる移動体の識別や追跡技術を開発している。さらに、深さによって異なる振動データを利用して、移動体から同センサへの振動伝播を解析する技術を構築し、最適な同センサの配置や本数などの計画、ならびにセンシングに適した舗装に関する技術の検討も進めている。
今後の展開
鹿島は、橋梁やトンネルなどのインフラへの光ファイバセンサの適用を通じて、構造物に生じる変形などの状況の評価、利用状況の把握、センシングデータに基づく利用者へのリアルタイムなサービス提供、といったインフラの新たな価値の創出を目指している。
今回の取組みにおいても、道路に埋め込まれた同センサを活用し、舗装や地盤などの構造を評価するだけでなく、より安全なモビリティサービスを提供できる道路インフラとしてスマートロードの開発を進めていくとしている。
ニュースリリースサイト(kajima):https://www.kajima.co.jp/news/press/202310/10c1-j.htm