東北大学
4.MEMSジャイロの高性能化
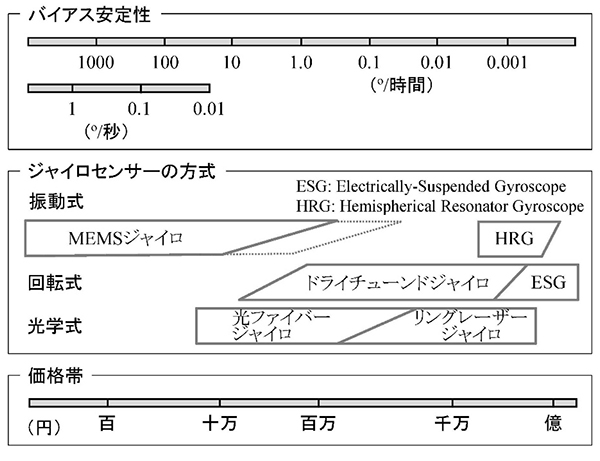
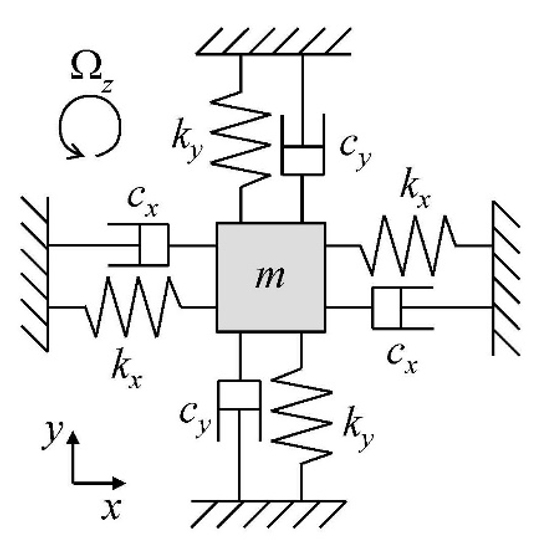
海洋産業で水中ドローンの用途が広がっているようだ。空中ドローンは姿勢を維持するのにMEMS慣性センサ(ジャイロ+加速度センサ)を、また、高度を測定するのにMEMS気圧計を利用している。MEMSジャイロはこの姿勢制御では良い働きをしている。これは、姿勢制御は比較的短時間の精度しか必要ないので、バイアス安定性の比較的悪いMEMSジャイロでもその任を果たせるからである。一方、GPSが利用できない水中ドローンでは、姿勢制御に加えて慣性航行のためにMEMSジャイロへの期待が高いと思う。しかし、慣性航行には現状のMEMSジャイロの性能は十分ではない。x とfy を近づけなくてはならなくなり、前述のようにバンド幅が小さくなる。ただし、これはy軸の変位を0にフィードバック制御する「フォースリバランス」によって回避できるため、Q値の向上は高性能化に有効な方法である。④の究極の形として、両軸の共振周波数を完全に一致させる(fx =fy )ことを「モードマッチング」と呼ぶ。これも高性能化に有効な方法として開発されているが、詳しくは 別の解説4)
図2 ジャイロの種類と性能
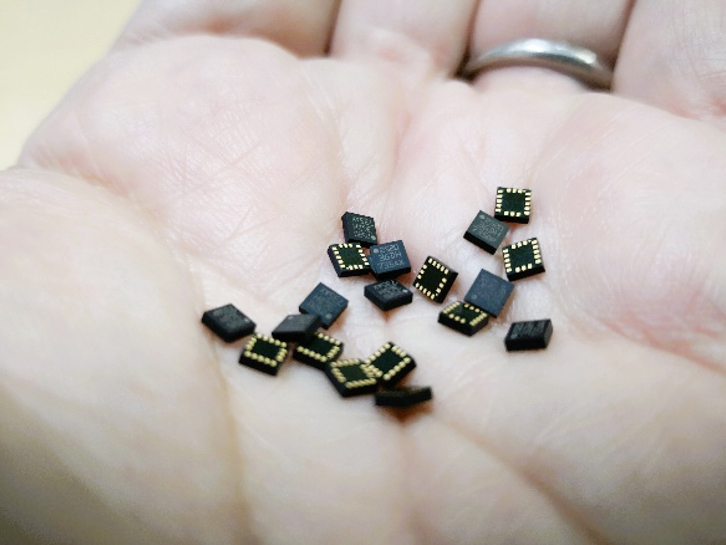
(a) MEMSジャイロの外観
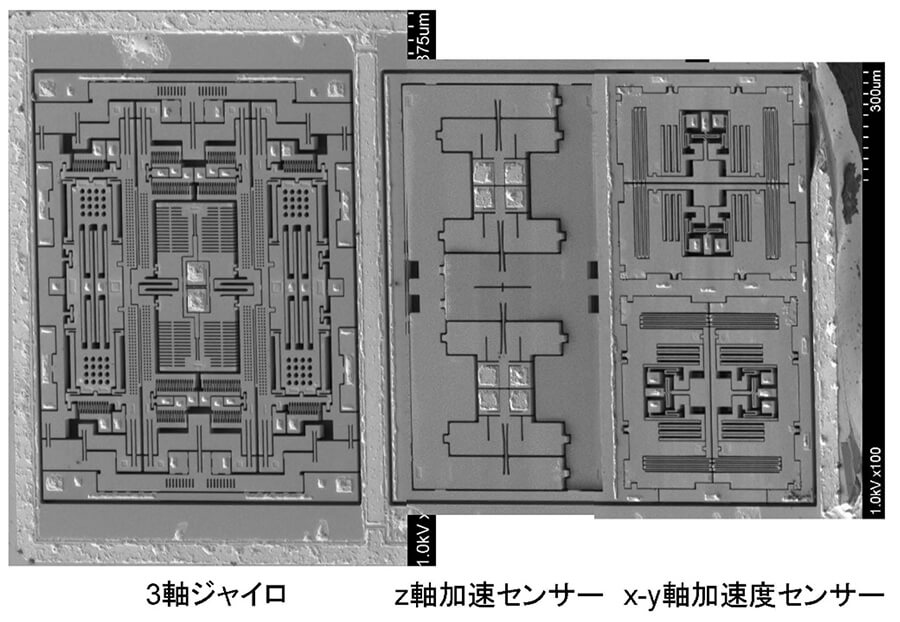
(b) MEMSジャイロの内部構造(TDK-InvenSense MPU-9250、撮影:田中・塚本研究室)
5.高性能MEMSジャイロへの挑戦
上述の②から④の指針に沿ってMEMSジャイロを高性能化するための最大の障害は、加工誤差である。もし私達に設計通りに構造体を製造できる「神の手」があれば、高性能MEMSジャイロを実現することは比較的たやすいと思う。本稿の最初に紹介したESGを思い出して欲しい。理想に近いローターを製造するために「狂気の加工技術」が用いられ、その結果、超高性能が実現されたわけである。ベリリウムは人体に有害なので、その加工中の安全対策も大変だったはずである。また、他にも凄い加工技術が使われていることは想像に難くない。
図5 振動ジャイロの機構
上に例示した原因のうち1つ目と2つ目の例示は加工誤差によるものである。CD-SEM(測長電子顕微鏡)で見て完璧にできていても、計測できない水準の僅かな不完全性によってx軸とy軸の不要なカップリングは生じてしまう。これはfxとfyを近づければ、より深刻になる。さらに、仮にMEMS構造体が完璧にできていたとしても、それをウェーハレベルパッケージング(参考記事5)
6.フーコー振子と全角モードジャイロ
フランスの物理学者Jean Bernard Léon Foucault(1819~1868年)は、1851年にパリのパンテオン宮殿に長さ67 m、質量27 kgの振子を設置して、地球の自転を実証する公開実験を行った。このフーコー振子(図6)はゆっくりとした地球の回転を測定できるジャイロであり、しかも、出力は角速度ではなく回転角そのものである。このようなジャイロを全角モードジャイロと呼ぶ。自律航行や位置同定にはある基準に対する角度が必要であるが、角速度を出力する普通のジャイロ(レートジャイロ)を用いてこれを得るためには、角速度を積分しなくてはならない。しかし、角速度出力にはドリフトやゼロオフセットが含まれているので、積分によってあっという間に誤差が蓄積し、得られた角度はあさっての方向を示してしまう。これに対して、地球の回転を測定できるフーコー振子は高性能ジャイロと言える。
図6 フーコー振子(ドイツ博物館、撮影:著者)
全角モードジャイロは、原理的にバンド幅が無限大で、しかもスケールファクターがジャイロの構造だけによって決まり、温度に影響されないという特長を持つ。上述のフォースリバランスジャイロでは、スケールファクターはy軸の共振周波数によるが、シリコンを含むほとんどの材料は温まると柔らかくなるため共振周波数には温度依存性があり、したがってスケールファクターは温度で変わってしまう。既に述べたように、温度変化によるスケールファクターの変化は高性能ジャイロにとって深刻な問題であり、これがMEMS全角モードジャイロが期待される1つの所以である。しかし、既に述べたように、x軸とy軸が完全に同じにし、かつ完全に直交させることは難しい。その実現には多くの挑戦があるが、私達の研究については次の論文を参考にして欲しい( 論文16) 7)
7.おわりに
海中では、地上、海上、および空中より慣性航行に頼る部分が多くなるため、ジャイロの役割が大きいはずである。だからこそ、ポラリス潜水艦のためにESGが開発された。現代においては、海洋産業向けの高性能MEMSジャイロがこの分野の技術を先導し、VR、自動運転、ロボティクスなどに応用を広げていくストーリーがありうるだろう。様々な応用が広がるというのはとても重要なことである。というのも、半導体製造技術に基づくMEMSは大量に生産すれば、安くなり、安くなれば、さらに思ってもみなかった応用が広がるというポジティブ・フィードバックが働く製品だからである。ジャイロの専門的な技術に興味があれば、国際会議 IEEE Inertial 20248)
【著者紹介】 田中 秀治(たなか しゅうじ)
■略歴
1999年3月 東京大学大学院工学系研究科産業機械工学専攻博士課程修了。博士(工学)。 1999年4月 東北大学大学院工学研究科助手。 2001年4月 同講師。 2003年4月~2013年7月 同助教授。 2013年8月 同教授。 2004年1月~2006年3月 科学技術振興機構研究開発戦略センターフェロー(兼務)。 2006年4月~2018年3月 同特任フェロー。 2017年度 日本機械学会マイクロ・ナノ工学部門 部門長。
IEEE Fellow、日本機械学会フェロー。
(公財)レーザー技術総合研究所
3.ラマンライダーによる海上観測
ラマンライダー技術で海水中のガスの計測が可能かどうかを検証するために、水深が20 mと比較的浅い海底からメタンガスを70%程度含む火山性ガスの湧出がある竹富島海底温泉にて海上観測を実施した。竹富島海底温泉は石垣島を中心とした八重山諸島にある竹富島の北東沖約1 kmの海底に位置する。
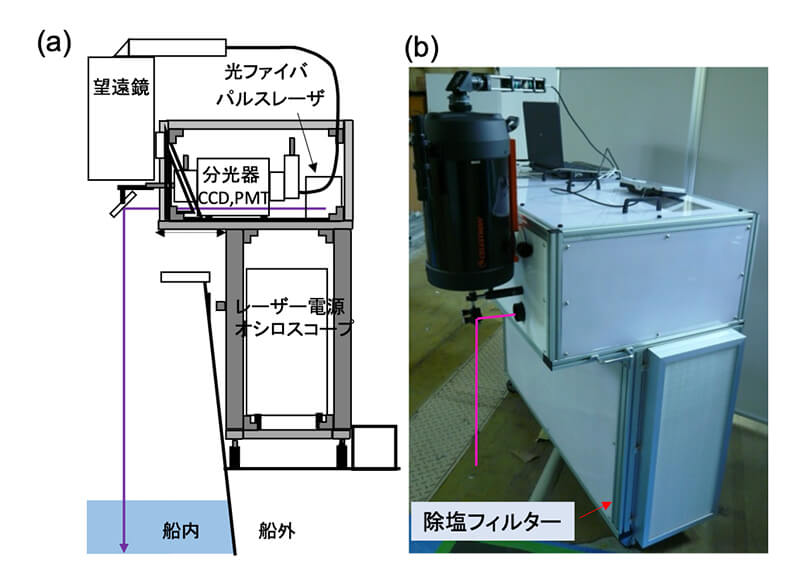
図4 海上ラマンライダーシステム
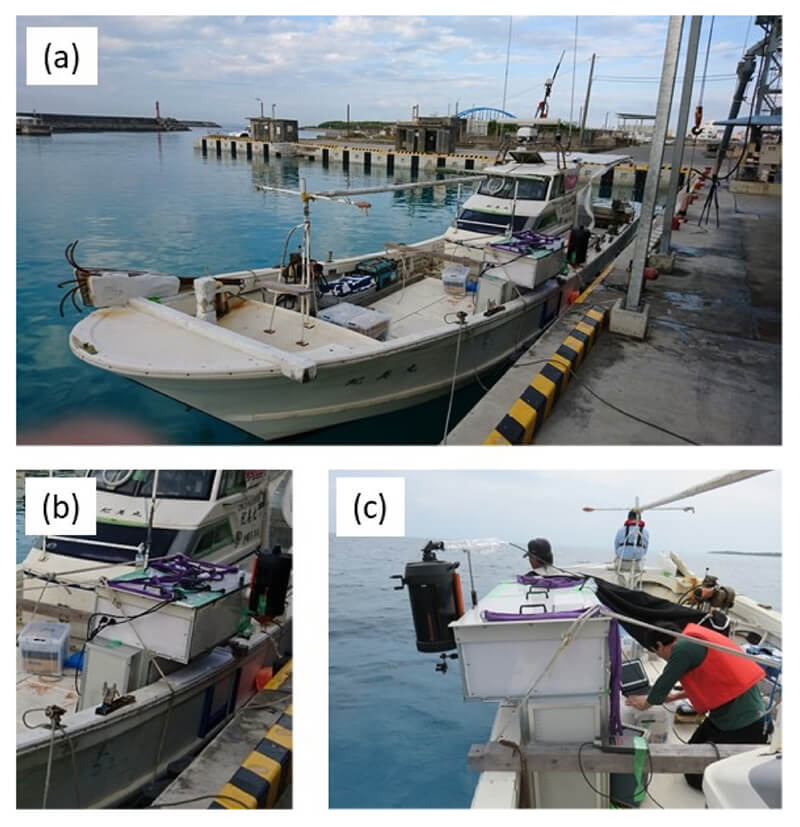
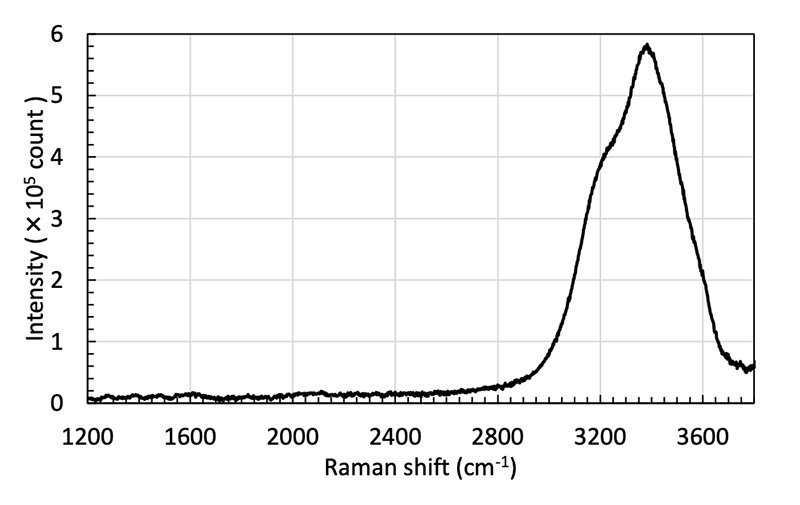
図5に漁船に搭載した海上ラマンライダーの写真(a)、(b)と竹富島海底温泉での観測の様子(c)を示す。海上ラマンライダーシステムは大阪から石垣島までコンテナ輸送したが、トラックや船での輸送による光軸ずれなどの影響はほとんど見られず、本ライダーシステムは特別な調整の必要なく、動作が可能であった。図6に竹富島海底温泉の真上にて実施した観測結果例として水のラマンスペクトルを示す。不安定な海上においても、これまでの室内実験と同様のラマン信号の観測が可能であり、本水中ラマンライダー技術は海中モニタリングに適用可能である。
図5 海上ラマンライダーによる海上観測
図6.海上ラマンライダーによる水のラマンスペクトル
4.長水槽による水中ライダー実証試験
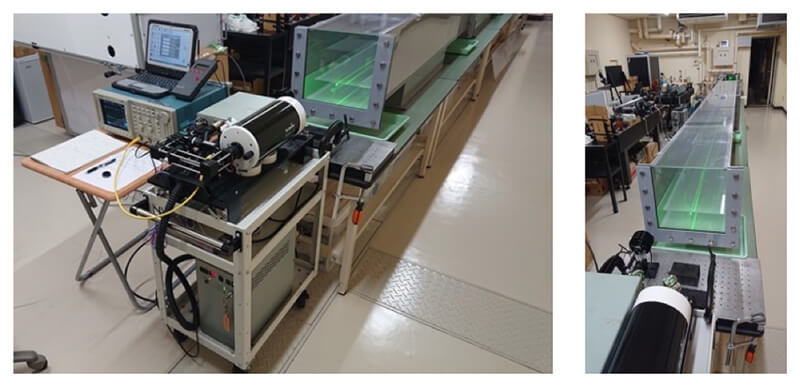
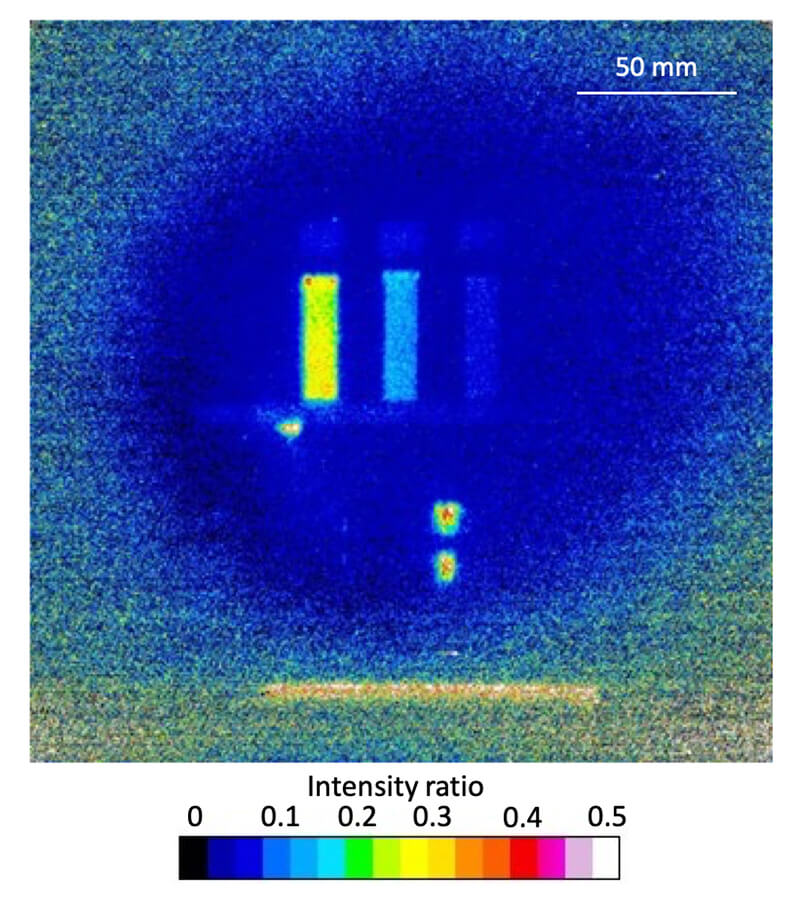
図7に示すような長さ6 mの長水槽を実験室に保有しており、水中ライダーの原理実証実験を実施している。水槽実験では、海底パイプラインからの原油の流出を模擬して、蛍光セルに入れたキャノーラ油を測定対象としている。(11),(12) 。(13) 。レーザーは凹レンズで拡散照射し、ナノ秒の時間ゲート測定が可能なICCDカメラで記録した。干渉フィルターを利用して、油(628 nm)、水(649 nm)の2波長の画像を取得し、それらの比を取った画像である。濃度(光路長)が異なる油をフラッシュラマンライダーによって可視化できていることがわかる。フラッシュ方式は、レーザーの走査が不要であることから、撮像画面内の時刻ずれのないイメージが得られるため、水中ガス・物質の漏洩モニタリングなどには有効な手法になると考えられる。
図7.6 mの長水槽を利用した水中ライダー実証試験の様子
図8.フラッシュラマンライダーにおる5 m先に設置した油の可視化画像
5.おわりに
海中インフラの維持管理や、海底開発が海中の環境に及ぼす影響を効率よく評価することを目的として、海水中に含まれるガスや油をラマン散乱で測定するラマンライダーによる海中モニタリング手法の開発を行っている。水の透過が比較的高い波長532, 355 nmのパルスレーザーを利用して水中ガスのラマン分光測定が可能であることを示した後、船舶搭載型のラマンライダーシステムを開発し、海上観測に成功した。また、実験室にある長水槽を利用して、水中の油のTOF方式、フラッシュ方式による検出試験を実施している。
参考文献
T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Opt. Commun. 480, 126508 (2021).
T. Somekawa, J. Izawa, M. Fujita, J. Kawanaka, and H. Kuze, Appl. Opt., 60, 7772, 2021.
T. Somekawa, S. Kurahashi, S. Matsuda, A. Yogo, and H. Kuze, Opt. Lett., 48, 5340 (2023).
【著者紹介】 染川 智弘(そめかわ としひろ)
■略歴
2008年3月 大阪大学大学院理学研究科宇宙地球科学専攻 博士(理学) 2008年4月~ 公益財団法人レーザー技術総合研究所 入所 研究員、副主任研究員、上席研究員を経て現在、主任研究員 2023年4月~ 大阪大学レーザー科学研究所 招へい教授
東京海洋大学
4. 海洋観測プラットフォームへの搭載
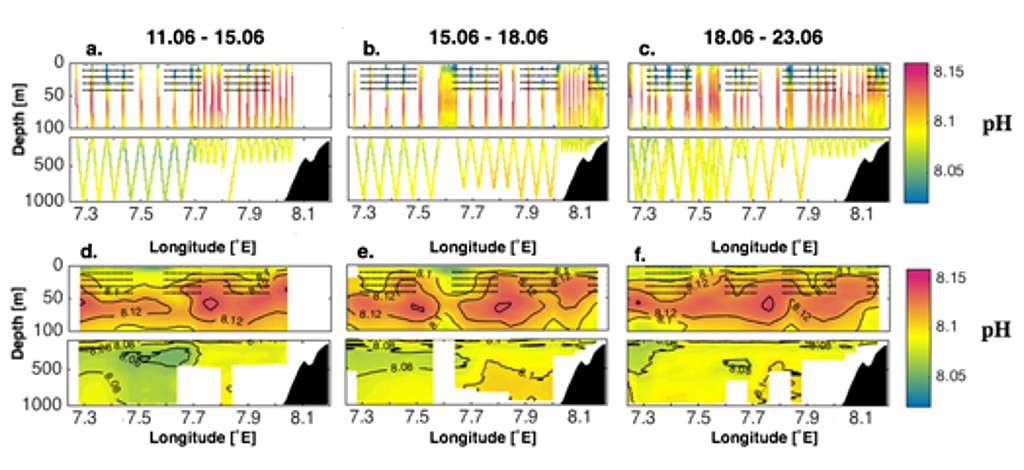
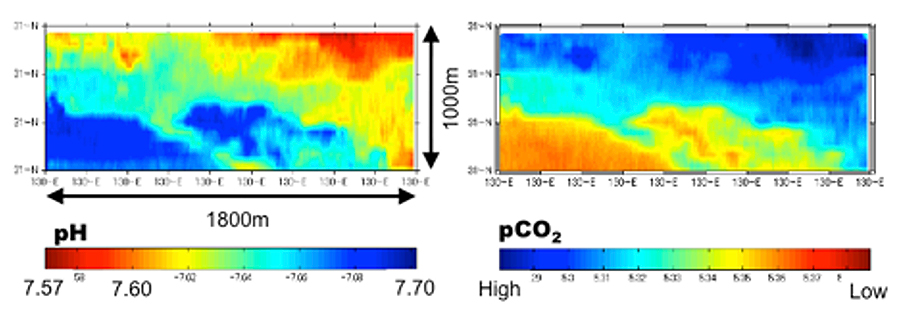
開発された小型電子回路基板では、シリアル接続(RS232C、RS485、RS422)とアナログ接続(1-5V)を、接続する海洋観測プラットフォームによって使い分けている。RS232C接続ポートは元々メイン基板に組み込まれており、それ以外の接続は同サイズの専用接続サブ基板を用いる。RS232C接続は大型有索無人海中ロボット(ROV;ハイパードルフィン)・大型AUV(AUTOSUB6000)・海洋グライダー(Seaglider)3) 、RS485接続は小型ROV(VideoRay)、RS422接続は長距離RS422ケーブル4) 、アナログ接続はCTD多筒採水器システム(CTD-RMS)でそれぞれ使用し、小型AUV(REMUS100)5),6) や他のROV5),7) にはスタンドアローンで搭載している(図3)。また、海洋観測プラットフォームがケーブルで接続されているROV、CTD-RMS、RS422では、船上(あるいは陸上)においてリアルタイムのモニタリングが可能である4) 。2 センサを搭載し、地中海において表面から水深1000mまでの範囲で15日間の広範囲連続計測を行ったものである。また、図5は、pH/pCO2 センサを搭載したREMUS100による鹿児島湾の熱水噴出地帯の水深100m層でのpHとpCO2 の広範囲マッピング計測結果である。水深200mの海底に存在する熱水由来の低pH・高CO2 水塊の拡散状況を捉えている。
図3 現場型pH/pCO2 /ORPセンサを搭載した種々の海洋観測プラットフォーム
図4 Seagliderによる地中海での広域連続計測結果
図5 AUVによる鹿児島湾の熱水噴出地帯の水深100m層でのpHとpCO2 の広範囲マッピング計測結果
5. その他の現場型化学センサ
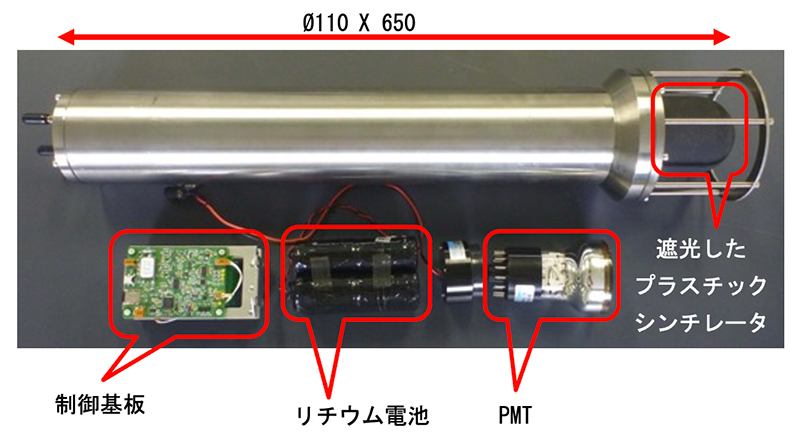
放射性元素は生物起源沈降粒子や陸起源粒子などの懸濁粒子に吸着し、懸濁粒子の沈降に伴って深層へ輸送される。これまでの沈降粒子中の放射性核種の計測は、大容量採水器や現場ろ過装置で試料採取して陸上実験室で計測を行ってきた。海洋中の放射線を現場計測できるセンサで鉛直連続計測を行うことができれば、データ取得にかかる労力の大幅な減少や、計測データ数の飛躍的な増加が期待できる。筆者は、放射線の一つであるガンマ線を現場計測するガンマ線センサを開発した8) 。
図6 現場型ガンマ線センサ
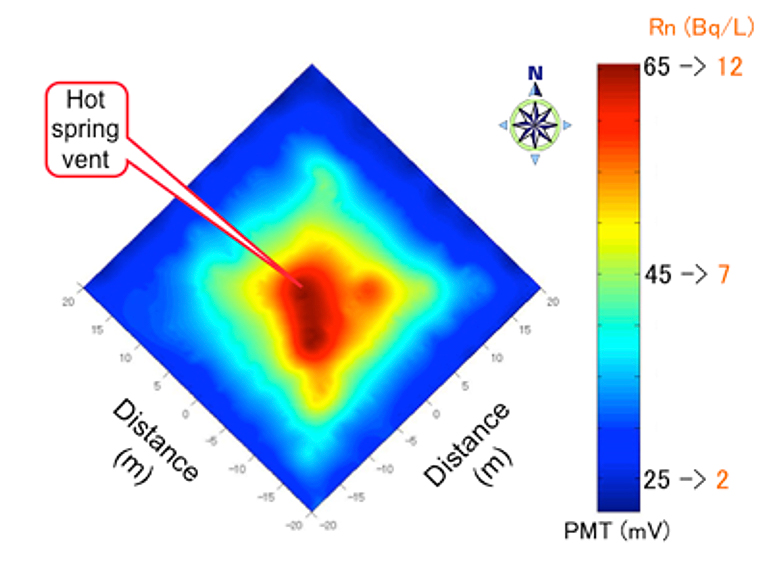
図7 竹富島海底温泉地帯におけるガンマ線のマッピング計測結果
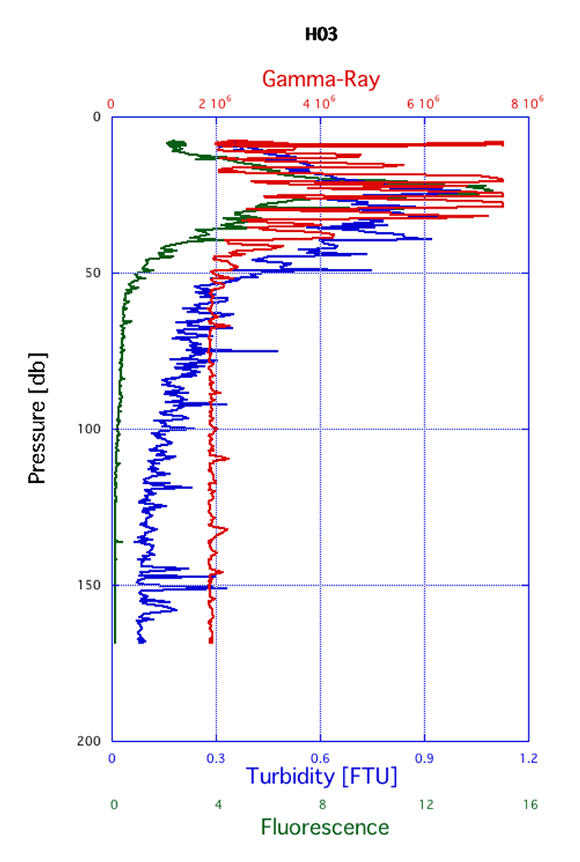
図8 北西太平洋におけるガンマ線(赤)、濁度(青)、蛍光強度(緑)の鉛直連続計測結果
6. マルチセンサ統合型制御システム
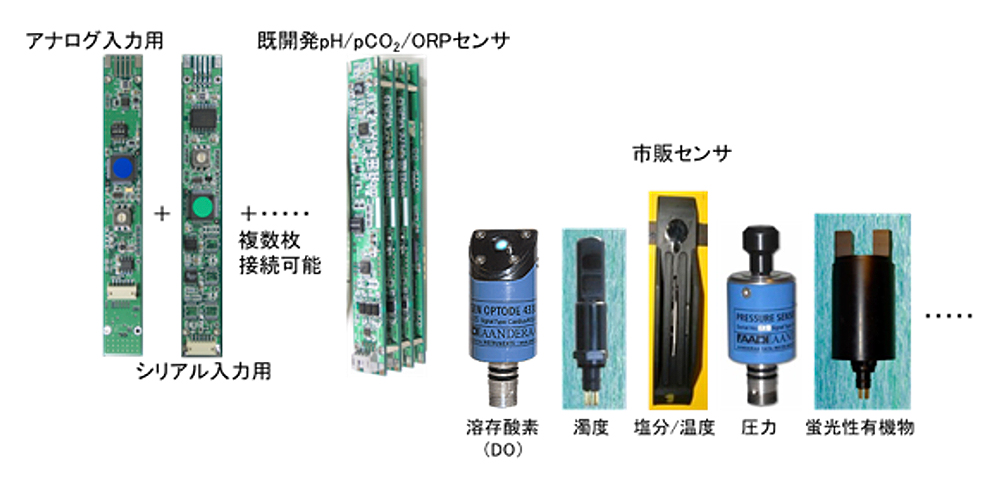
これまでの化学センサを使った観測や探査では、種々のセンサを別々に運用していたため、センサの設定やデータ管理が繁雑であった。このため、筆者が開発したセンサや市販センサなどの種々のセンサを接続して一括制御でき、多成分同時計測が可能な小型のマルチセンサ統合型制御システムを開発をした。このシステムでは、先に開発したpH/pCO2 /ORPセンサの電子回路基板(図2)に接続できる、シリアル入力用とアナログ入力用の2種類の同形状・同接続方式のサブ基板を新たに開発した(図9)。これらのサブ基板は、それぞれの市販センサに適合した電圧供給と計測データ取り込み機能にあわせて設定し、順次メイン基板に接続してメイン基板で全ての接続されたセンサを制御する。なお、市販センサ接続用サブ基板では、センサを作動させるための電源を別途に供給する方式とした。これまでに統合したセンサはpH、pCO2 、ORP、深度、塩分、水温、溶存酸素(DO)(以上はシリアル入力)、濁度、蛍光性有機物(以上はアナログ入力)の9種類である。今後は、より多くのセンサを接続したマルチセンサ統合型制御システムを海洋観測プラットフォームに搭載することを考慮し、大量のデータ通信に対応できるようにイーサネット接続への変更を計画している。将来的には、マルチセンサ統合型制御システムの汎用化を見据えた開発を進めている。
図9 マルチセンサ統合型制御システムと接続した化学センサ
参考文献
Hemming, M. P., Kaiser, J., Heywood, K. J., Bakker, D. C. E., Boutin, J., Shitashima, K., Lee, G., Legge, O., and Onken, R. “Measuring pH variability using an experimental sensor on an underwater glider”, Ocean Science, 13(3), 427-442 (2017).
Shitashima, K., Maeda, Y. and Sakamoto, A. “Detection and monitoring of leaked CO2 through sediment, water column and atmosphere in sub-seabed CCS experiment”, International Journal of Greenhouse Gas Control, 38, 135-142 (2015).
Shitashima, K., Maeda, Y., Ohsumi, T. “Development of detection and monitoring techniques of CO2 leakage from seafloor in sub-seabed CO2 storage”, Applied Geochemistry, 30, 114-124 (2013).
Maeda, Y., Shitashima, K. and Sakamoto, A. “Numerical study of leaked CO2 diffusion in sub-seabed CO2 release experiments”, International Journal of Greenhouse Gas Control, 38, 143-152 (2015).
Shitashima, K., Maeda, Y., Koike Y., Ohsumi, T. “Natural analogue of the rise and dissolution of liquid CO2 in the ocean”, International Journal of Greenhouse Gas Control, 2, 95-104 (2008).
下島公紀: プラスチックシンチレータを用いた現場型ラドンセンサの開発. 電力中央研究所報告, V0854, (2009).
【著者紹介】 下島 公紀(したしま きみのり)
■略歴
1989年3月 広島大学大学院生物圏科学研究科博士課程後期修了 学術博士 1989年4月 日本学術振興会特別研究員(東京大学海洋研究所) 1990年8月 (財)電力中央研究所 我孫子研究所 研究員 2006年7月 (財)電力中央研究所 環境科学研究所 上席研究員 2011年6月 九州大学 世界トップレベル研究拠点カーボンニュートラル・エネルギー国際研究所 CO2 貯留研究部門 准教授 2016年4月 東京海洋大学 大学改革準備室 教授 2017年4月 東京海洋大学 海洋資源エネルギー学部門 教授
■受賞歴
東京大学 名誉教授
3.水中コンクリート構造物の劣化診断
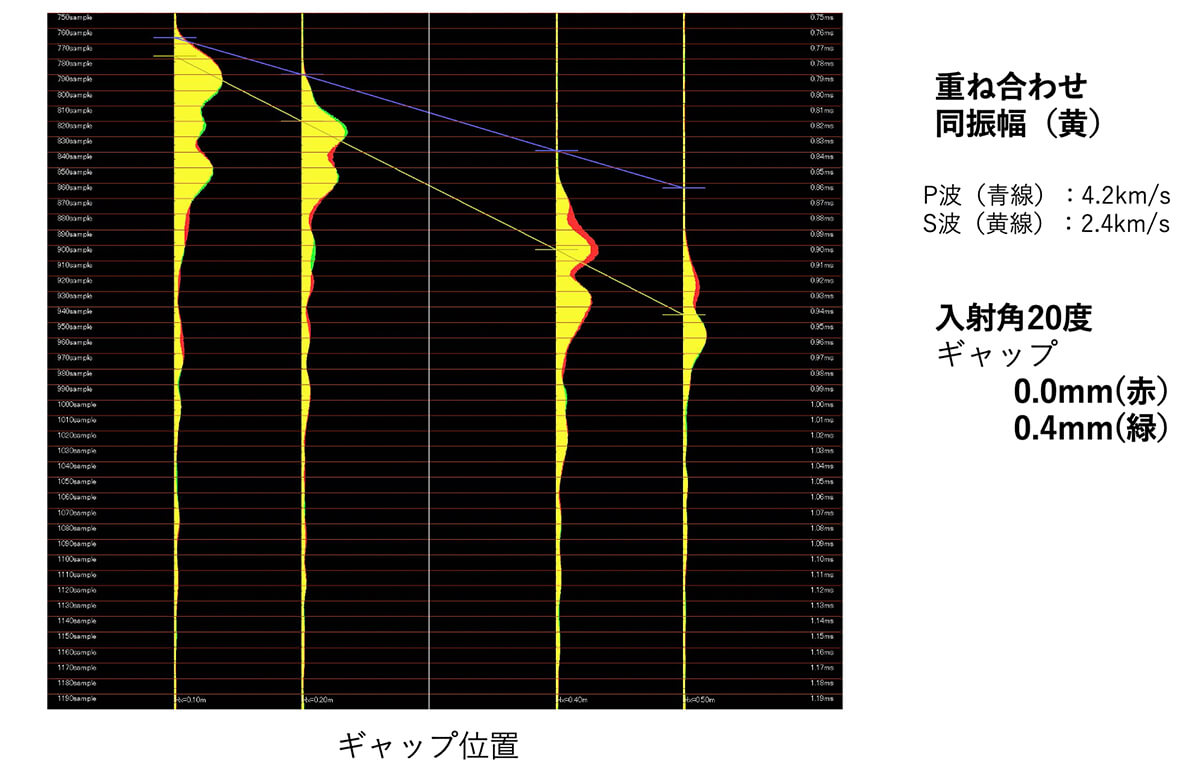
水中コンクリート構造物の劣化をP波とS波で探る
計測試験
解析状況
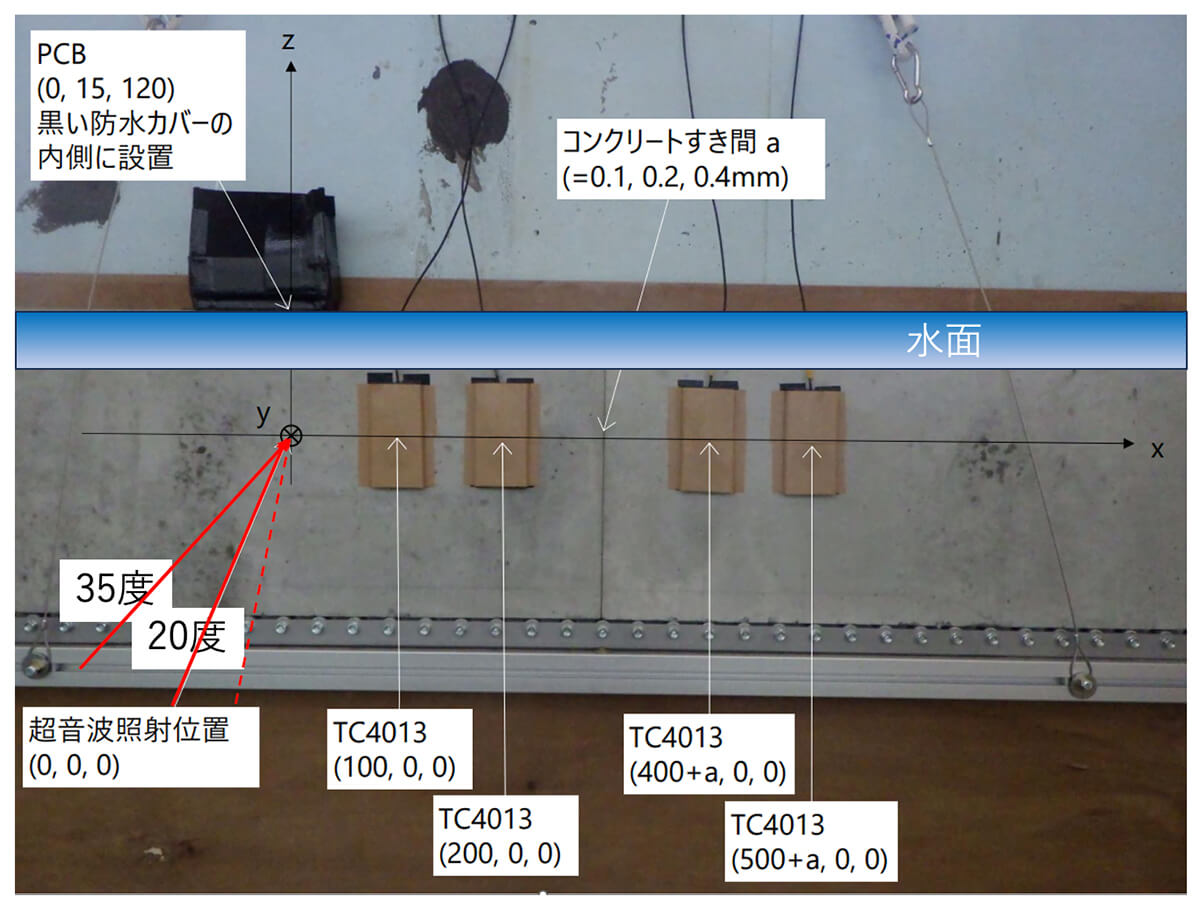
図6 水路に設置した2枚のコンクリート板とPSBP送波器とハイドロフォンの配置
図7 ハイドロフォンで受信した、P波とS波の包絡線解析結果
4.音響ビデオカメラを使用した船体歪と付着生物量の計測システム開発
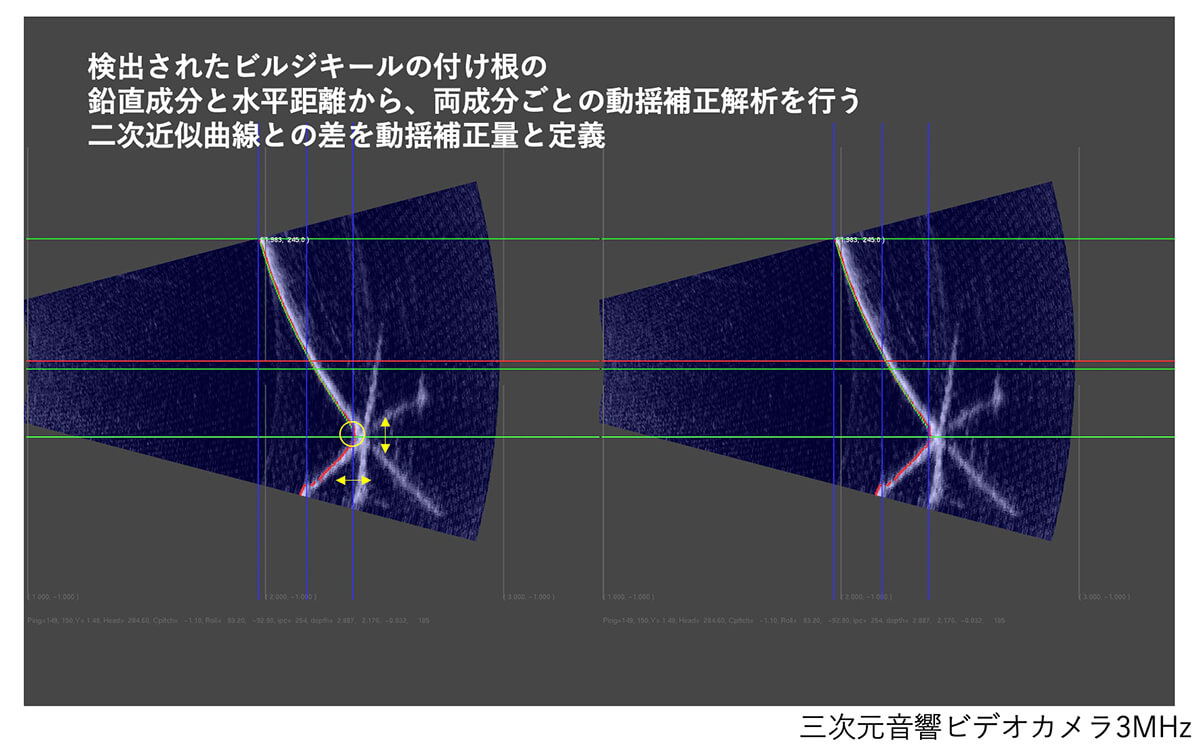
動揺を抑え、等間隔で音響的に撮像するため、8mの連結スキャンレールを独自に設計開発し、音響ビデオカメラで船体を2mから5mの距離で三次元計測を行った。音響ビデオカメラARIS3000の前面に1度のconcentrate lensを装着し、水平移動方向に1度、鉛直方向に0.25度の送受ビームを128本形成した。移動速度はステップモータを使用し0.5m/sとし、10 fames/sで撮像した。船体、ビルジキール、スラスター、シャフト、舵板などを3mmの高精度で計測を行った。
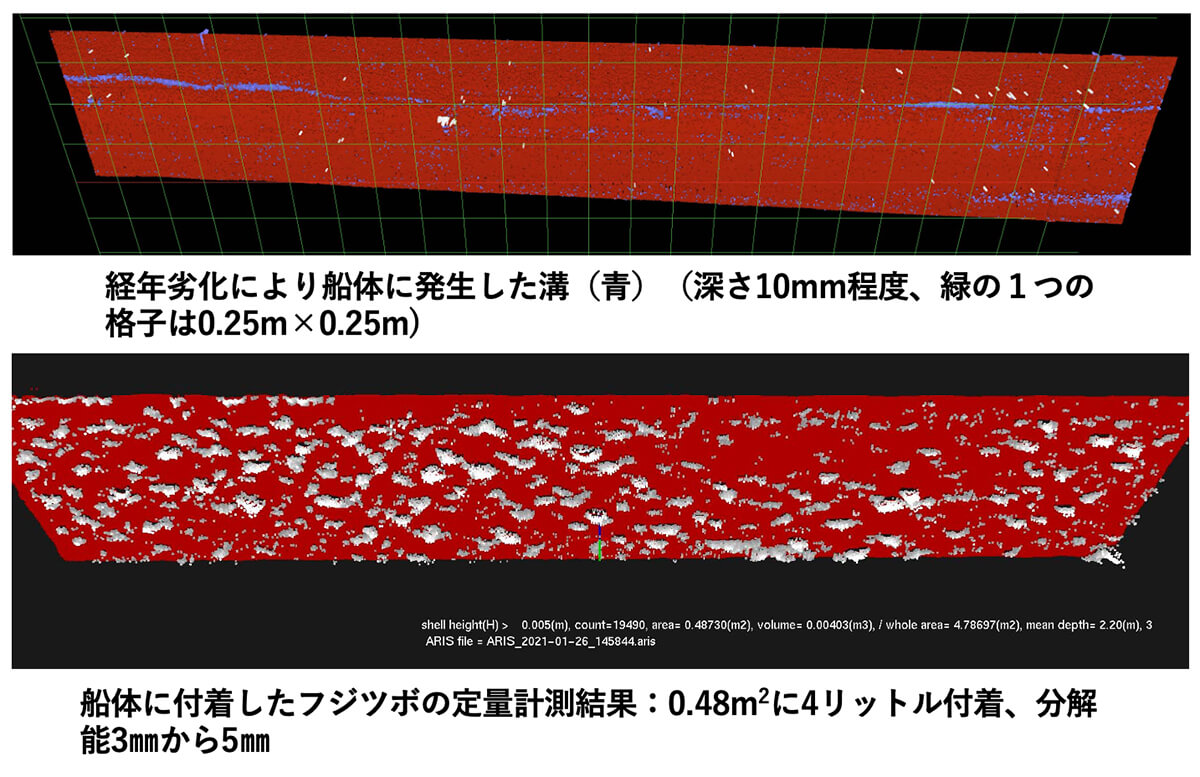
船体映像の動揺補正を行い、3mmの分解能で船体歪と付着生物の量を計測
船体歪と付着生物量の定量計測
図8 ARIS3000で計測した船体舷側鋼板上の溝、付着したフジツボの分布と量
図9カメラ深度3mスキャン音響計測画像、動揺補正解析(三次元画像)
5.おわりに
これから産業技術として期待される水中計測技術は、画像、映像処理に移行しつつあり、視覚的にわかりやすい結果が求められる傾向にある。一方、映像から簡潔に特徴を数値化、定量評価、診断する、マッピング技術も並行して必要である。また、水中探査の音響ビデオ信号や音響信号もwcs水中映像化され、数値、定量化が重要である。
【著者紹介】 浅田 昭(あさだ あきら)
■略歴
昭和52年3月 早稲田大学工学部電気工学卒業 平成7年10月 東京大学理学博士授与 昭和54年4月 海上保安庁海洋情報部入庁 平成12年4月 東京大学生産技術研究所教授 平成25年4月 東京大学生産技術研究所海中工学国際研究センター長 平成31年3月 定年退職 令和元年6月 東京大学名誉教授
学会活動: