日本での自動運転の国家プロジェクトは、SIP第1期『自動走行システム』、第2期『自動運転(システムとサービスの拡張)』と9年間(2014年度~2022年度)に渡り”競争と協調”の考え方のもと、産学官連携、省庁横断、業界連携・学学連携・国際連携など幅広い領域が一体となった研究開発活動や東京臨海部実証実験等を推進し大きな成果をあげてきた。また,レベル4の推進については、経済産業省と国土交通省が主導する「自動運転レベル4等先進モビリティサービスの研究開発・社会実装プロジェクト(RoAD to the L41))」として2021年度~2025年度のプロジェクトとして事業が進められている。
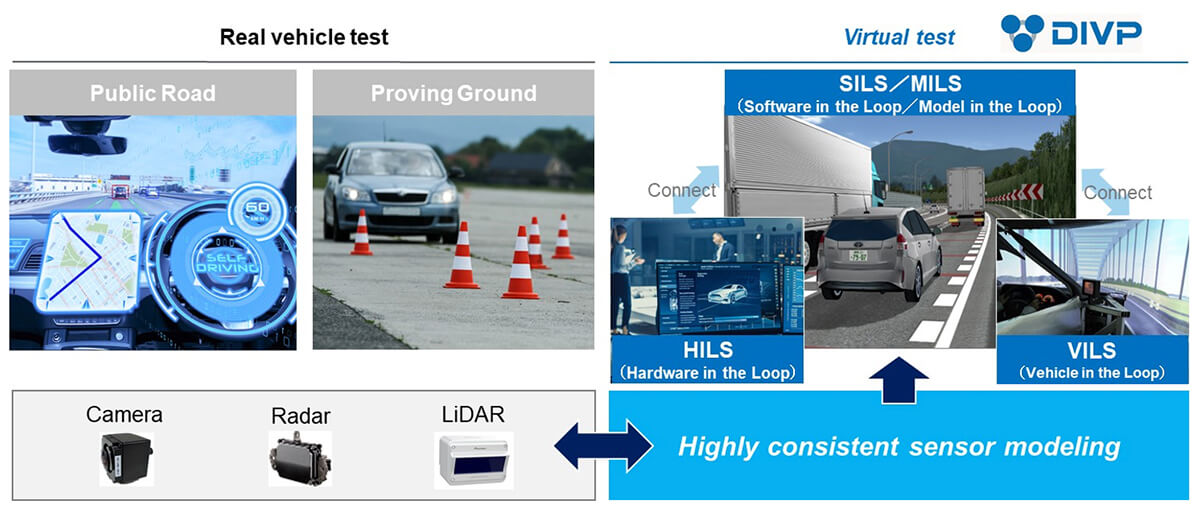
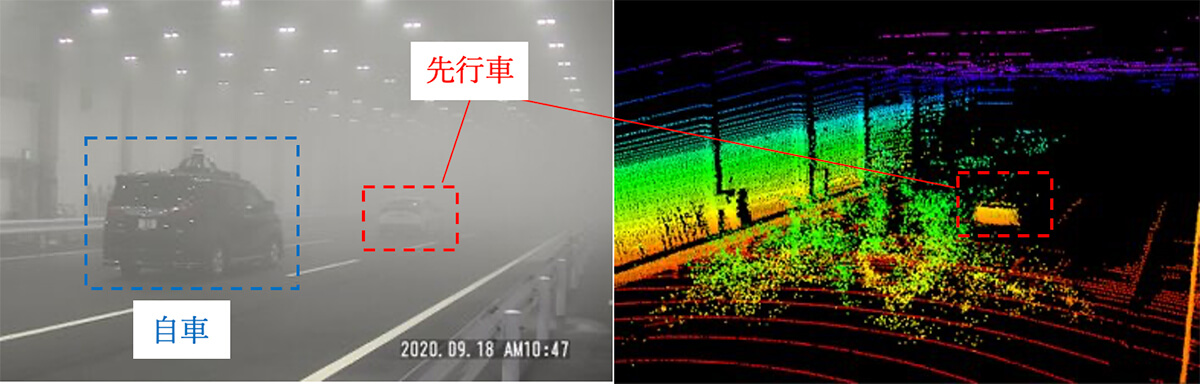
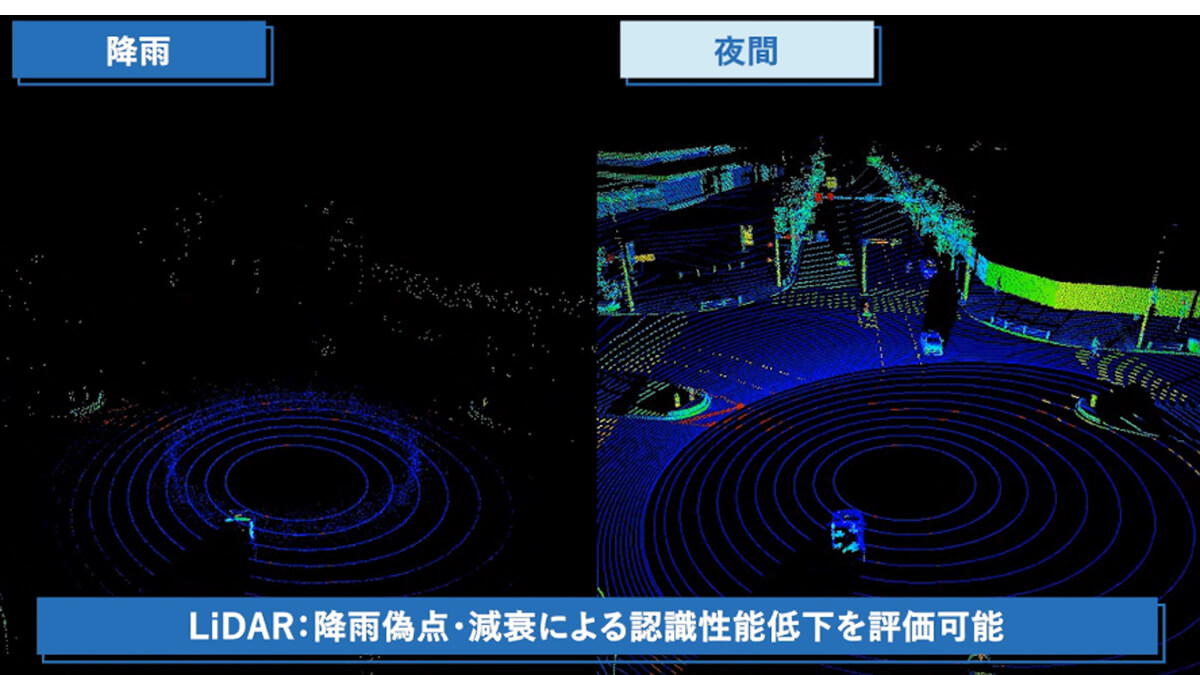
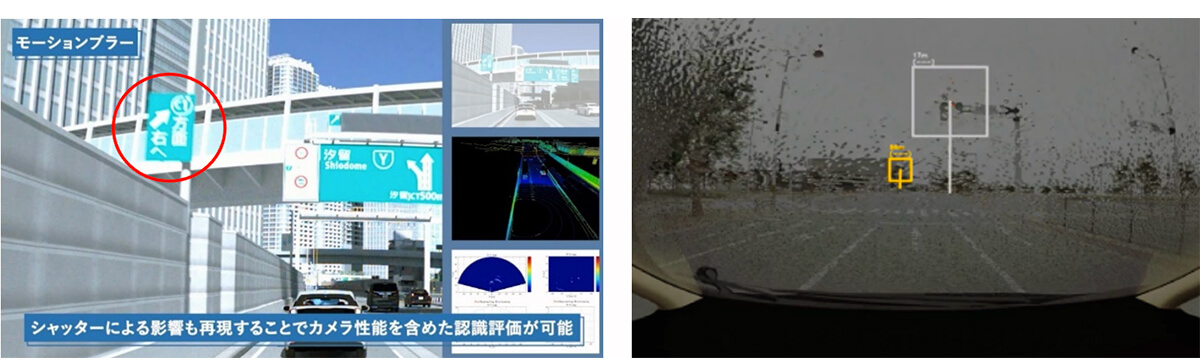
自動運転の最大の課題は安全性の確保である。また、システムが運転を行う自動運転に対する不安や恐れを軽減し、事故が起きた場合の責任の所在を明確にしていくためには、安全性の論証が必要である。SIP自動運転では,公道での実証実験を安全性の検証の重要な手段と位置づけ、東京臨海部実証実験を推進してきた。一方で、安全性の検証には事故を模擬した危険な条件での評価も必要であり、公道での実証実験だけで全てをカバーすることはできない。このためSIP第2期では、自動運転車両にとって重要なセンサ性能評価も可能な実環境と一致性の高いシミュレーション環境の構築にオールジャパン体制で取り組んだのが「DIVP(Driving Intelligence Validation Platform)プロジェクト(仮想空間における自動走行評価環境整備手法の開発)」2) 3) である(図1)。
図1.仮想空間シミュレータDIVPの取組み
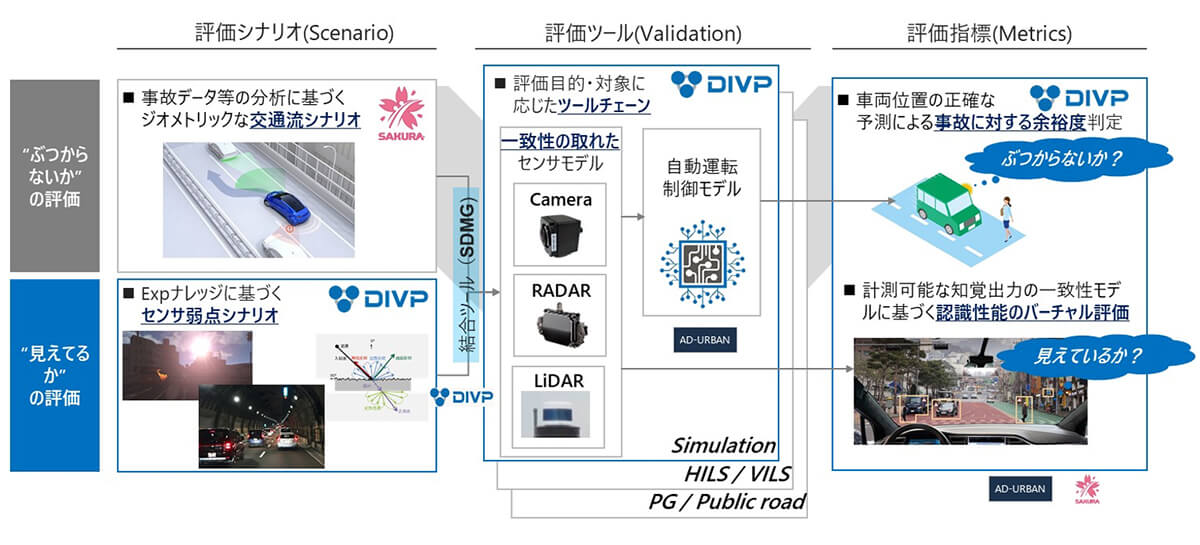
SIP自動運転の2022年度での終了にともない、2023年度からは経産省の「無人自動運転等のCASE対応に向けた実証・支援事業」に組み込まれ、「DIVP」「SAKURA」「AD-URBAN」を束ね、安全性評価基盤検討タスクフォースとして連携を強化し、RoAD to the L4や産業界の研究開発に貢献する自動運転/ADASの安全性評価シミュレーションプラットフォームを構築中である(図2)。
2009 The US Government Award for Special Appreciation for contributions to the development and popularization, award by the National Highway Traffic Safety Administration(NHTSA) at the 21th ESV Congress
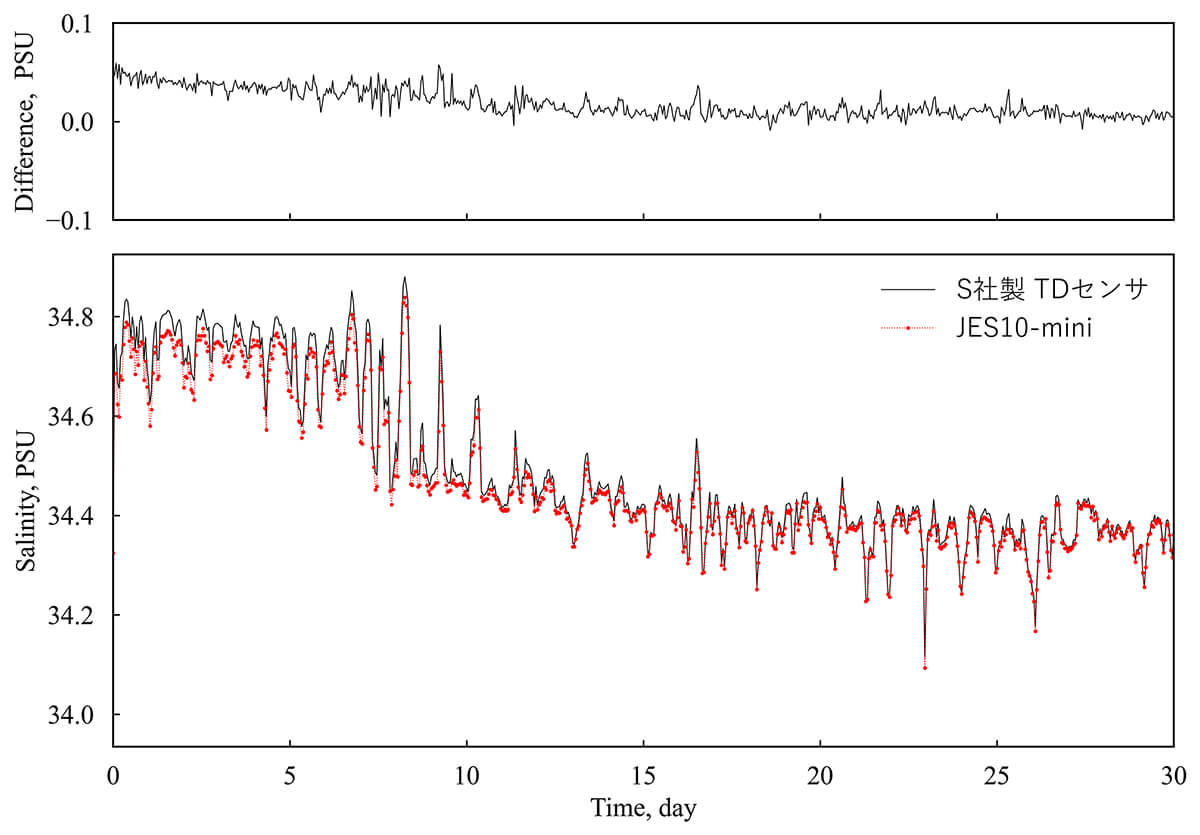
pH測定法には様々な方法があるが、主なものはガラス電極法、pH指示薬を用いた比色法、ISFETなどを用いた半導体電極法がある。これらの中でpH指示薬を用いた比色法は、指示薬を選ぶことにより特定の範囲で高い精度での測定が可能であり、指示薬の劣化を防げれば、長期的に安定している利点がある。しかし指示薬や海水の混合、セルの洗浄などを行うため、分光解析にかかる電力の他、ポンプやバルブを設置し、駆動させるための電力も必要となり、試薬の保管・調整も必要で、取り扱いが煩雑になる。ガラス電極やISFET半導体電極を用いる方法は、計測の応答が早く、手軽に連続測定でき、消費電力が少ないという利点がある。一方、長期の利用では、個々の電極が持つ特性により、測定値が実際の値から離れていく“ドリフト”と呼ばれる現象が大きくなり、正しい計測ができなくなる。少しでも安定した計測ができるように、ガラス電極や半導体電極の工夫がなされてきたが、“ドリフト”は抑えられない。そんな中、Wendy Schmidt Ocean Health XPRIZEの開催が知らされた。
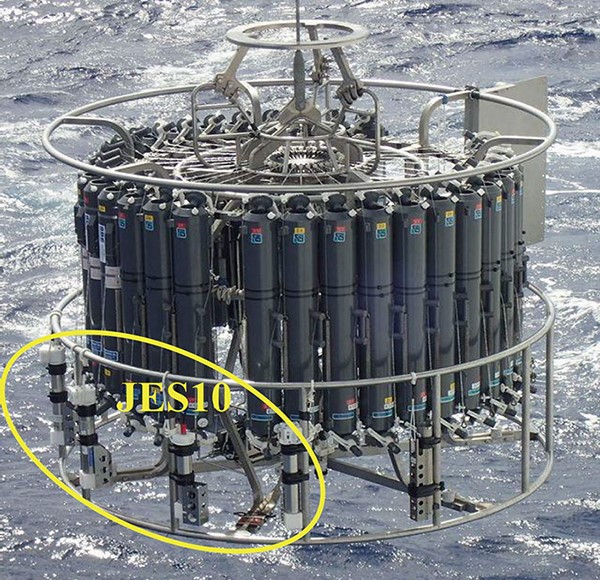
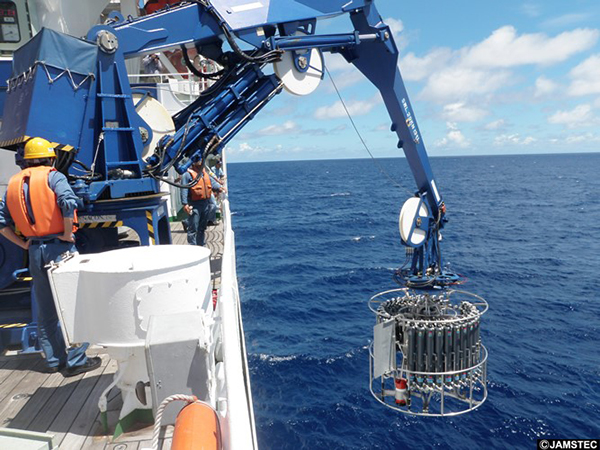
Wendy Schmidt Ocean Health XPRIZEに参加するにあたり、海洋における既存のpHセンサの欠点を克服する新しいpHセンサを開発することとした。XPRIZEの開始まで4か月程度の余裕があったため、既存の海洋pH計測で良い精度を示していたガラス電極センサと、海水pH計測で高い精度が出る現場型比色pHセンサをハイブリッド化させ、それぞれの欠点を補いながら長所を生かすHybrid pH Sensor System(HpHS)を開発した。(図2)HpHSは省電力なガラス電極法で、高頻度測定を行い、移動速度が速い時にも追従できるようにした。一方、ガラス電極法の数回~数十回の計測に対して、高精度な比色法で連携測定を行い現場補正することにより、長期間で安定したpH測定を可能とした。
4) IPCC(2013),Climate Change 2013:The Physical Science Basis.Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change.Cambridge University Press,Cambridge,United Kingdom and New York,NY,USA,1535 pp.
5) Wakita,M.,S.Watanabe,M.Honda,A.Nagano,K.Kimoto,K.Matsumoto,M.Kitamura,K.Sasaki,H.Kawakami,T.Fujiki,K.Sasaoka,Y.Nakano,and A.Murata(2013),Ocean acidification from 1997 to 2011 in the subarctic western North Pacific Ocean,Biogeosciences,10,7817-7827.
6) Dore,J.E.,R.Lukas,D.W.Sadler,M.J.Church,and D.M.Karl(2009),Physical and biogeochemical modulation of ocean acidification in the central North Pacific,Proc.Natl.Acad.Sci.U.S.A.,106,12,235-12,240.
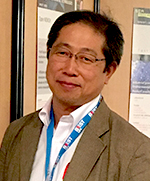
海洋研究開発機構(JAMSTEC)が発行している海と地球の情報誌「 Blue Earth 」の171号(海洋ロボティクス特集号:2023年3月発行)についてご紹介する。
記事は以下の9項目の解説が掲載されており、JAMSTECが開発した、有人潜水調査船、自律型無人探査機(AUV)と有索式の無人探査機(ROV)の紹介に始まり、調査船や探査機に搭載された通信装置、センサ、カメラなどの機器とそれらを用いた制御や解析などの関連技術が解説されている。また、記事の後半には、調査船や探査機を用いた深海資源の調査や海洋ロボティクスで実現する未来像などが図を用いて分かり易く示してある。この分野に興味をお持ちの方には、一読の価値がある。