神奈川工科大学
4.DIVPシミュレータの自動運転車安全性評価への応用例
4.1. 自己位置推定アルゴリズムのロバスト性評価への応用
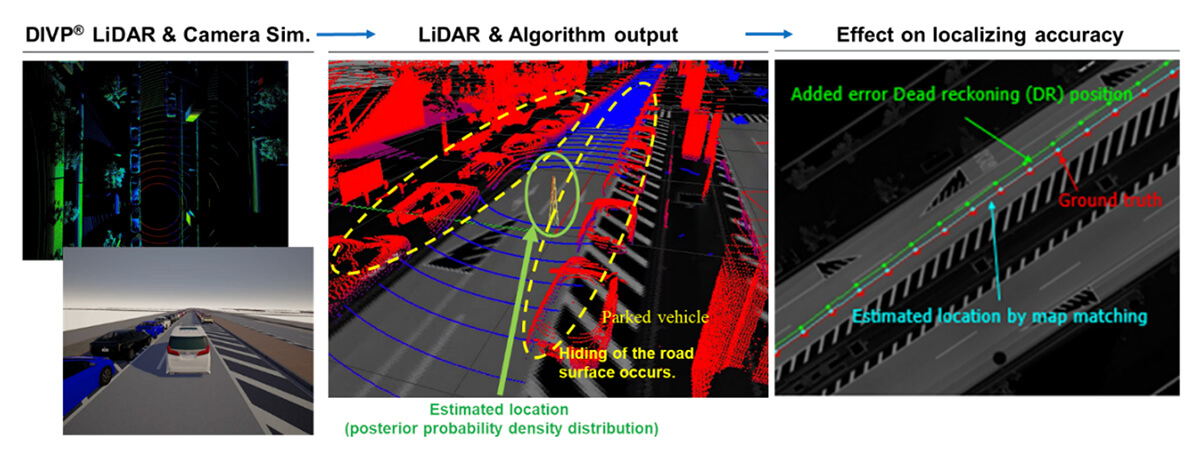
AD-URBANシステム4) では、LiDARを利用したマップマッチングによる自己位置推定アルゴリズムを構成している。このロバスト性評価のために、DIVPシミュレータで走行路面を隠すように駐車車両が多数並んだ厳しい条件をLiDAR出力の仮想空間モデルとして生成した。その評価の結果、AD-URBANの自己位置推定アルゴリズムは常に正解値と一致し高いロバスト性を有することが検証できた(図9)。この様に、DIVPは,現実空間では設定が難しい条件の設定が可能でシステム評価に貢献できる。
図9 自己位置推定アルゴリズムのロバスト性評価
4.2. 横断歩道認識限界評価への応用(路面濡れ条件の抽出)
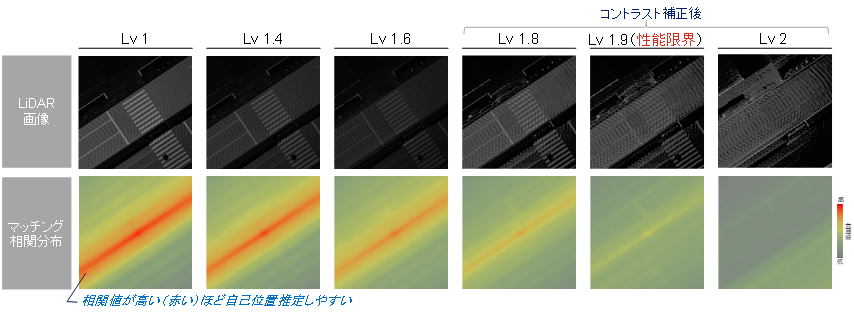
前節同様にAD-URBANシステムの路面濡れ条件でLiDARでの路面横断歩道などのオルソ地図との位置マッチングアルゴリズムの認識性能限界をDIVPシミュレータにより使い評価した。DIVPで生成したLiDAR出力から濡れ路面を再現し、コントラストレベルをパラメータとして水準を設定することで認識限界(図10、Lv.1.9)を導き出すことができた。
図10 路面濡れレベルでのLiDAR認識限界の検証
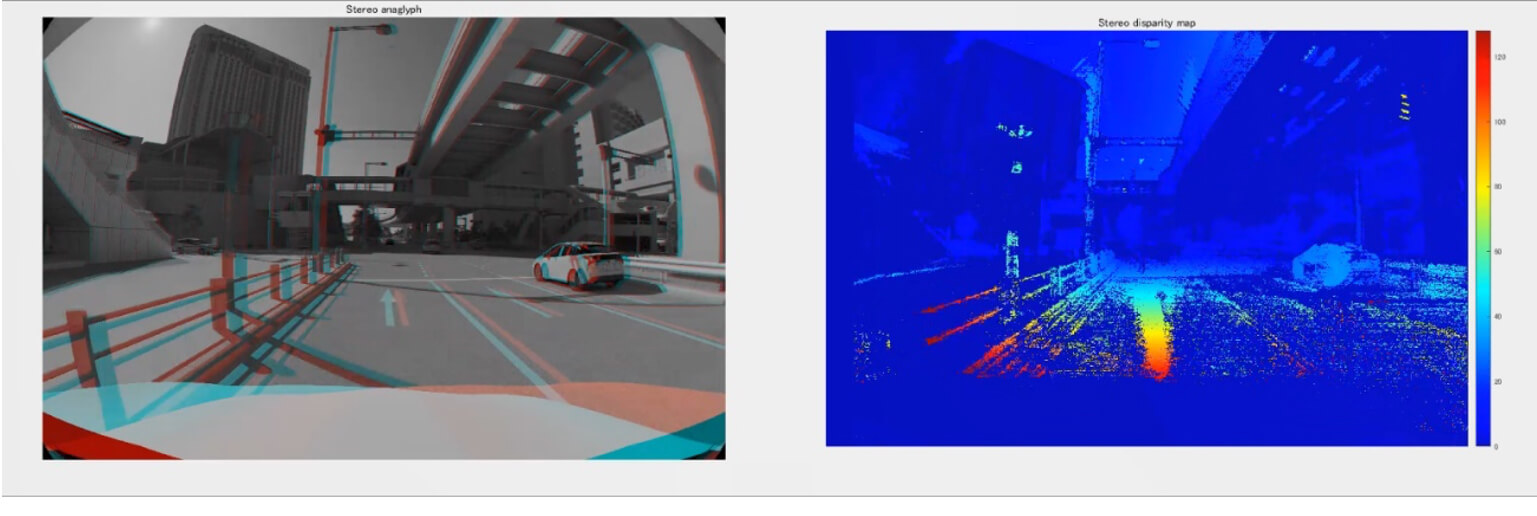
4.3. ステレオカメラの測距性能アルゴリズム評価への応用
車載センサ界では、センサフュージョンがその代表例として、複数種類のセンサを束ねて複合化し、それらを高度な統合信号処理する潮流が続いている。この分野の技術者は、高度な複合センサシステムの全てを一貫してシミュレートできるような研究プラットフォームを切実に欲している。この点でDIVPシミュレータ(Simulink版)は、ブロック図を描く感覚で複数センサを並べて複雑なシステムを設計でき、更にMATLABのToolbox群を活用した高度信号処理が可能であり、時代の流れと非常にマッチしている。一例として図11は、2台のカメラを並列化し、ステレオカメラを実現した例である。MATLABの「Computer Vision Toolbox」5) を活用し、視差は30cmとした。
図11 ステレオカメラの計算例 (左:左右のカメラ画像、右:計算された距離画像)
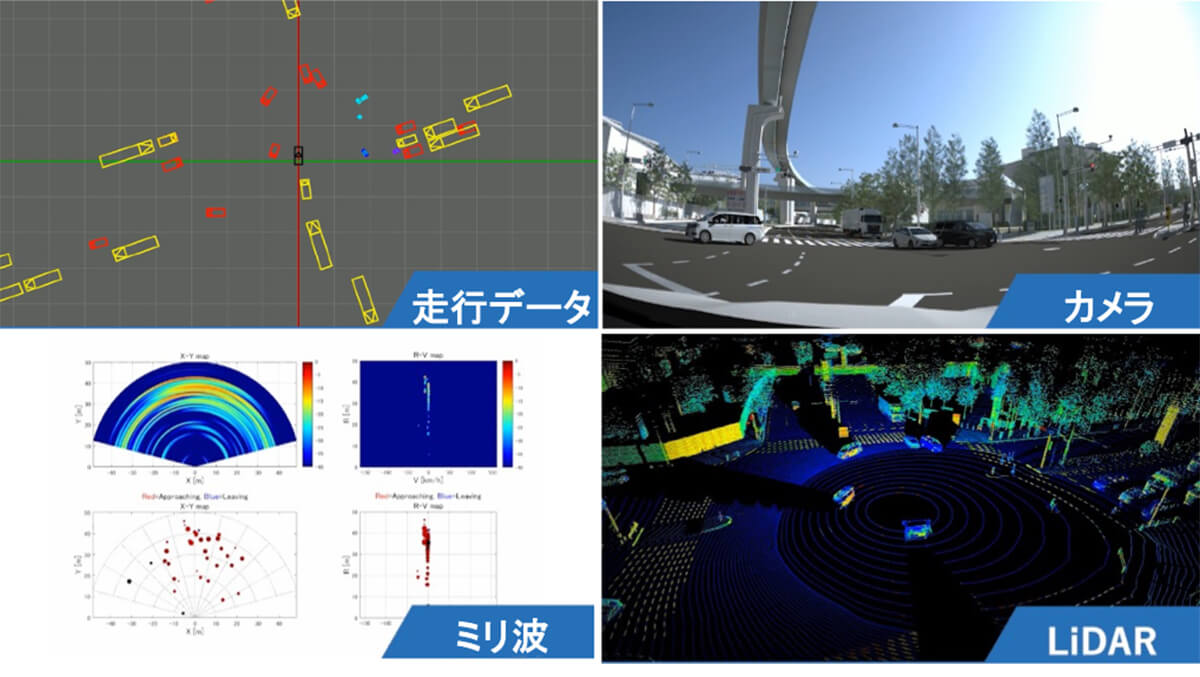
4.4. 自動運転車の交差点右折時の安全性評価への応用
実際の交差点右折時のデータから、DIVPシミュレーションで交通状況と、カメラ、ミリ波レーダ、LiDARから観た知覚・認識状況を再現し、対向車などの認識性能と安全余裕等の評価指標の導出にも取り組んでいる。時刻同期されたシミュレーションプラットフォームであるため、様々な交通環境の交差点での認識能力と安全余裕の両面の安全性評価に対応できる可能性がある(図12)。今後、交差点評価シナリオの構築や自動運転車のアルゴリズムの評価指標として開発していく。
図12 交差点右折時のDIVPシミュレーションでの安全性評価
この他にも、AI強化学習用のイメージデータ生成への応用、4Dイメージングミリ波レーダでのフリースペース生成アルゴリズム開発への適用、ミリ波レーダやカメラなどHILS(Hardware in the Loop simulation)への応用など、応用例は多岐にわたる。
5.国際連携・標準化
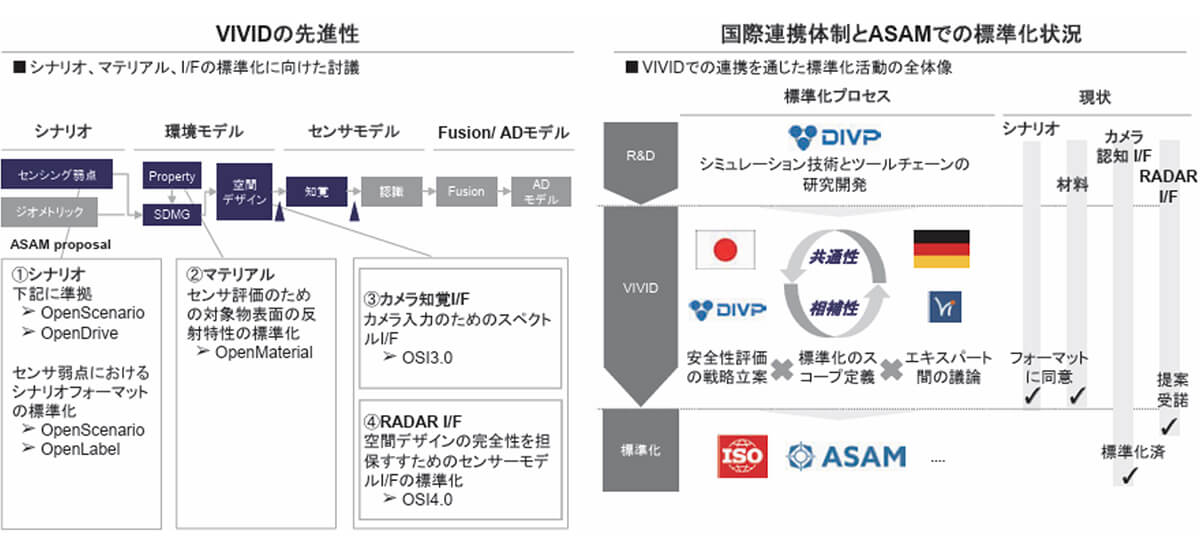
安全性評価に関し、世界各国では様々なアプローチが試行されている。従来の独BMWiの予算で実施され、2019年に完了したPEGASUSプロジェクト6) やその後継となるSET Levelプロジェクト7) は、シナリオをベースとしてアプローチとして有名である。8) に対しては、DIVPからOpenDRIVE/OpenSCENARIO,OSI(Open Simulation Interface)等の主要WGに参加し、DIVPの特徴となるセンサ弱点シナリオ記述、各環境モデル対象への反射特性、センサ等各モデル間のI/Fの標準化などの提案を進めている。カメラ入力に関するI/FについてはOSI3.0の標準仕様の実績を達成し、最近では、各センサ対象の反射物性データを定義するOpenMATERIALのWG活動でDIVPが主導的立場になっている。(図13)
図13 DIVPの優位性とVIVIDを通じたASAM標準への貢献
6.まとめ
世界の自動運転開発は既に社会実装の段階へ入っており、ここ数年の米中日の目まぐるしい動きになっている。日本では国家プロジェクトの役割が大きく、その中で「DIVP」は安全性評価のための「仮想空間シミュレータ」の開発を行っている。
【著者紹介】 井上 秀雄(いのうえ ひでお)
■略歴
1978.3 早稲田大学理工学部機械工学科卒業 1978.4~2016.3 トヨタ自動車(株) 2013.4~現在 東京農工大学 大学院工学府 機械システム工学専攻 客員教授 2016.4~現在 神奈川工科大学 創造工学部 自動車システム開発工学科 教授 2017.4~(兼務) 工学教育研究機構 先進自動車研究所 所長・教授
■受賞
1992 24th FISITA Paper Award, Development of Vehicle Integrated Control System 1998 28回市村産業賞 貢献賞, 「VSC(Vehicle Stability System)の開発」 1998 31回機械振興協会 通産産業大臣賞, 「横滑り防止 車両安定性制御システムの開発」 2009 The US Government Award for Special Appreciation for contributions to the development and popularization, award by the National Highway Traffic Safety Administration(NHTSA) at the 21th ESV Congress 2016日本機械学会 交通・物流部門 業績賞
合同会社オフショアテクノロジーズ
4. 観測の自動化
JAMSTECでは、海洋観測の省力化を図るために、観測の自動化を進める技術開発を行っている。前述のCTDセンサは環境の変化をデータに置き換えることは出来るが、観測自体は、乗船している人間がウィンチやロープを利用して観測を行う。その点においてはセンサだけでは観測が自動化出来ているとは言い難い。そのため、開発したCTDセンサを搭載した小型の自動昇降フロートの開発を2014年から進めていた。
Fig. 7 小型観測フロート「MOF」
JAMSTECの研究船を利用して様々な環境でテスト観測が行われたのち、これに関しても合同会社オフショアテクノロジーズにて知財の使用許諾を取得して、製品化を実施している。
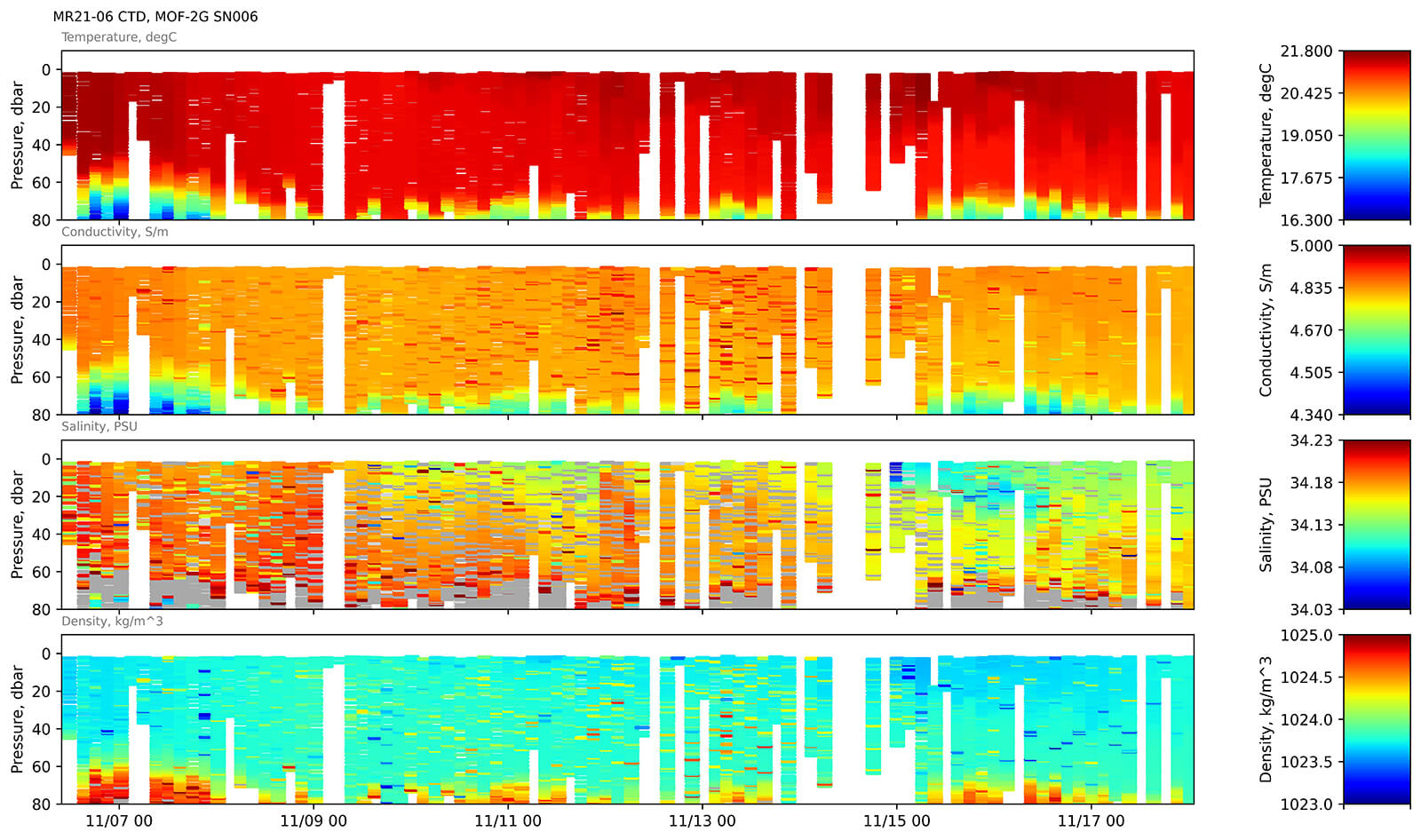
Fig. 8 MOFで取得したデータの例
現在は主に、船舶から投入して、様々な環境での学術目的の観測や、技術試験などに利用されているが、将来的には、例えば無人航行船(ASV)や、さらには航空機からの自動投入も視野に入れ、開発を進めている。
5. 観測の自動化、省力化に向けて
海洋観測センサの普及は品質の安定化や量産によるコストダウン、ユーザーニーズに合わせた設計の最適化など、研究機関での実施は難しく、メーカーでしか成しえない工程によって実現される。これらは、地道な評価の積み重ねによって到達する目標であるが、より良い製品を生み出すためには避けて通れない道である。長期的な視点で見た時、研究開発の成果を社会に実装し、地球温暖化という共通の課題解決に貢献していくために、しっかりとした研究開発を進めていきたい。また、これらの観測機器の充実によって、漁業や工業など、様々な分野との関わりを深め、多くの産業分野が海洋に関わりやすくすること、そして人々がどこにいても、海の中の環境を精緻に正しく理解していける社会の一端を担っていけることを目指している。
Fig. 9 オフショアテクノロジーズの将来イメージ
出典,参考文献
高精度CTDセンサーの開発
Argo 計画:気候監視のために 全球海洋の変動をリアルタイムで捉える観測システム 細田 滋毅,須賀 利雄(Bull. Soc. Sea Water Sci., Jpn., 65, 29 - 34(2011))
【著者紹介】 渡 健介(わたり けんすけ)
■略歴
2005年 東京都立科学技術大学 工学部 航空宇宙工学科 卒業 2007年 首都大学東京大学院 工学研究科 航空宇宙システムデザイン専攻 修了 2007年 ソニー株式会社 デジタルイメージング事業本部 PV機構設計部 2013年 国立研究開発法人海洋研究開発機構 技術開発部 海洋観測技術グループ 2018年 合同会社オフショアテクノロジーズ 起業 代表社員
海洋研究開発機構
XPRIZEにおけるトーナメント結果
Wendy Schmidt Ocean Health XPRIZE では、次の課題が設定された。「海洋の酸性化を知る手段は、少数の科学者の研究結果からもたらされている。しかしこの分野での民間の投資はほとんどない。海洋pH計測は海の健康をはかる大事な指標の一つだが、大規模な展開をするには高価すぎる。操作が複雑で、専門家のメンテナンスと再較正が必要。イノベーションの速度が遅いので、年単位の変化に十分なほど対応出来ていないし、長く持続できていない。新世代の改良された経済的なpHセンサの作成を促進させることが必要で、より安価で正確で、すべての海洋深度で操作できるpHセンサの提供が、最終的な目標である。」そこで、Wendy Schmidt Ocean Health XPRIZEには2つの賞が用意された。Affordability Prize (手頃な価格で使いやすく正確なpHセンサの開発)と、Accuracy Prize (最も正確で安定に機能するpHセンサの開発)である。これらを競うため、4つのフェーズをクリアし、勝ち抜き戦を繰り広げた。
図3 ガレージでのpHセンサ組み立ての様子。右端がHpHSチーム。組み立てたpHセンサは、試験水槽に吊るされ、水槽全体のエアバブリングによりpHを変化させたときの追従ができるかを評価した。
フェーズ3においては、ワシントン州のシアトルにあるシアトル水族館において、ピアから海水をくみ上げ、水族館の来訪者に観覧されながら、数か月の長期計測が実施された。フェーズ2~3では、バッテリーの交換などのメンテナンスだけとし、同一の機体を用いた。ファイナルフェーズにおいては、2015年5月にハワイ沖のSatation Alohaの海域において、ハワイ大学の「キロモアナ号」を用いた観測試験を行った(図4)。この決勝戦には5チームが進出し、HpHSチームもファイナリストとして参加した。われわれのほかは、イギリス、アメリカ、ノルウェーのチームであり、海洋観測における世界的なメーカー2社からのチームも含まれていた。海表面から水深3,000mまでの鉛直観察を行い、同時に行った採水器からサンプリングした海水のpHデータと比較して、評価された。
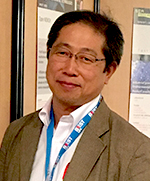
図4 ハワイ港をでる「キロモアナ号」甲板の5チームのpHセンサ。ファイナルフェーズでは同一条件の競争をするため、5チームのセンサがCTD採水器に取りつけられている。HpHSはやや下につきだしているが、赤矢印の先に配置された。CTDセンサはカルーセルの左下に見える。CTDセンサに比べると、pHセンサはいずれも大きい。採水器で採取した海水を精密に測り、各チームのpHセンサのデータと比較した。(写真提供:XPRIZE財団)
XPRIZEでイノベーションは加速したのか
Accuracy(正確性)とAffordability(手ごろ感)の両方で勝者となったのは、モンタナ大学からのベンチャー企業であるSunburst Sensorsチームであった。彼らのpH計測法は比色法であり、海洋pH計測においては、比色法の信頼性が高いことがあらためて示された。2位についたのは、海洋機器の世界的大手メーカーからのDurafetチームであった。ISFET半導体電極法を採用し、丈夫さとともに、実用展開に最も近い海洋pHセンサを自負した。これらの2機体は、XPRIZEが開催される前から米国で著名な装置であり、より改良が進んできている。HpHSはガラス電極法としてはもっとも良い成績を示したが、比色法も採用しているため、データそのものはSunburst Sensorsチームと引けを取らなかった。何が評価を下げたのかをみると、装置全体の大きさや、製造価格などAffordabilityが至らなかったことであった。2つの異なるセンサをハイブリッドさせたため、どうしても装置が長くなり、また全重量が重くなったため外装などを省略していた。Sunburst SensorsチームとXPRIZE後に情報交流を行い、制御基板の整理・流路設計のコンパクト化や、試薬使用量の少量化など、特許部分に触れないところでの課題を抽出した。比色法と他の手法を組み合わせた私たちの海洋pH計測法は、無理なく安定した値が得られる方法として発展改良が可能であり、XPRIZE参加前に比較的軽視していた扱いやすさを大幅に改善した次世代型のHpHSの開発を進めており、将来的にマイクロ流路技術を取り入れていこうとしている。
JAMSTECは西太平洋亜寒帯域の時系列観測点Station K2の海洋酸性化研究を継続しており、2015年からHpHSを係留設置し、精度の高い高頻度のpHデータの取得を実施している。2016年には北極域で、2019年には南極底層水の生成過程の解明を目指して、南極沿岸に2台を係留し、観測を行っている。XPRIZEが目指していたイノベーションの加速という点では、次世代型のHpHS開発において、海洋酸性化研究の用途だけではなく、二酸化炭素の地層回収・貯留(CCS)における海底での二酸化炭素漏洩モニタリングや、海底熱水鉱床などの開発に伴う環境影響評価への活用も見込んでいる。また、二酸化炭素排出を吸収し、温室効果ガスの増大を止めるカーボン・オフセットを評価する指標とするためにも、人の行けない環境の状態をはかるため、様々な海洋や水中の現場で、高精度高頻度なpHデータを取得し、海洋研究に貢献していく。ゆくゆくは、養殖業や水産業など、科学研究目標以外のユーザーに、海洋pH計測の活用が広がっていくことを期待したい。7) およびPR動画をYouTube公開8) しているので、ご覧いただければ幸いである。
【著者紹介】 三輪 哲也(みわ てつや)
■略歴
研究のポイント
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000062.000113674.html
マーストーケンソリューション(株)〔以下:MTS〕は、160kV出力で分解能1μm以下のナノ-マイクロマルチフォーカスの開放管X線源の開発に成功し、それを搭載したX線傾斜CT「MUX-6410」を販売する。
製品サイト:https://www.mars-tohken.co.jp/xray/products/xray-inspection/mux6410
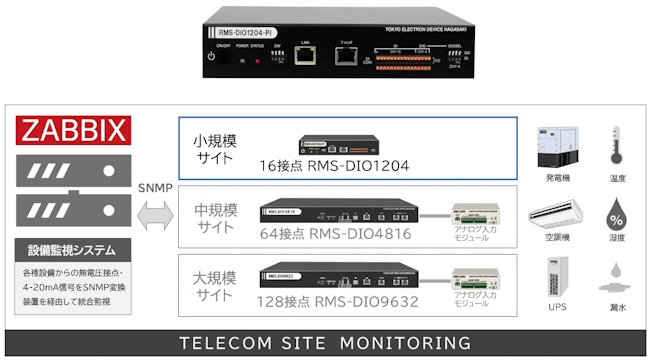
東京エレクトロン デバイス長崎(株)〔以下、TED長崎〕は、テレコムサイト・モニタリング・ソリューションにおける小規模サイト設備監視に最適化した「小型接点監視・制御ユニット/RMS-DIO1204-PI」の販売を2024年1月11日より開始した。
製品サイト:https://www.ngs.teldevice.co.jp/seihin/dio1204/