((一社)次世代センサ協議会 理事 IoTセンサ技術研究会)
3.IoT時代のセンサ信号
センサは「センサ(千差)万別」と言われるように種類が多く、動作原理や応用分野も異なるのでここでは個々のセンサについては議論せず、使用する立場から図3の従来型センサシステムと図5のIoTセンサシステムついて考える。
一般にセンサの出力信号は微小であるため信頼のおけるセンサ情報を取り出すためには、センサ自身のノイズとともに外部からのノイズにも注意を払う必要がある。例えば、信号回路ではセンサのmV程度の出力信号を3.3~5Vの電源をもつディジタル回路であるマイコンに入力するためには、100~1000倍に電圧を増幅する必要がある。その時、何もしなければ外部から入るノイズも同時に増幅されるが、シールド(電磁遮蔽)、フィルタ、熱変換(フェライトなどを使用)、差動伝送技術などにより外部ノイズを防ぐことができる。
また、逆にディジタル回路からの影響も考慮する必要がある。センサとマイコンを同一基板に製作する場合、マイコンの動作時に電源(グランド)の電位が変化し、それがノイズとなりセンサ信号に影響を与えることがある。一般には、プリント基板上のグランド面積を大きくしたり、アナログ回路のグランドとディジタル回路のグランドを一点だけで接続することにより防ぐことができるが、ノイズの小さいマイコンを選択したりキャパシタ(コンデンサ)を使用することも重要である。
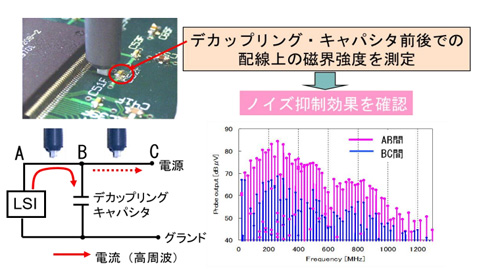
図8は、マイコン近傍におかれたキャパシタ(ノイズを伝わらなくするという意味で、デカップリングキャパシタと呼ばれる、電源供給という立場から見るとバイパスコンデンサと呼ばれる)の効果を高周波電流測定用の磁界プローブにより測定した結果である。キャパシタのためにLSIから外に出てゆく電源ノイズが減少していることが分かる。
また、外部からの妨害電波に対する電磁ノイズ耐性は自動車などの使用環境が厳しい状況で重要で、高周波電界を印加するテストが行われている。ほかの機器、システムからの電磁妨害を受けても自身も満足に動作する耐性は(EMS: Electro Magnetic Susceptibility、電磁耐性)と呼ばれている。
これらの電気的特性は、SI(Signal Integrity:信号品質)、PI(Power Integrity:電源品質)、EMC (Electro Magnetic Compatibility:電磁両立性)と呼ばれ電子機器を設計する上で考慮される。最後のEMCは、EMSとともに電子機器が発する電磁妨害波(EMI: Electro Magnetic Interference、電磁妨害)がほかのどのような機器、システムに対しても影響を与えないことも含んだものである。
IoT時代を象徴するものにスマートフォンがあり多数のセンサが使われているが、狭い機器の中に信号の大きさの異なる部品(電波の送信回路、受信回路、アンテナ、各種センサ、LSI)が搭載されているため、それぞれの回路がすべて正常に働くためには、上記のSI、PI、EMC設計が重要である。
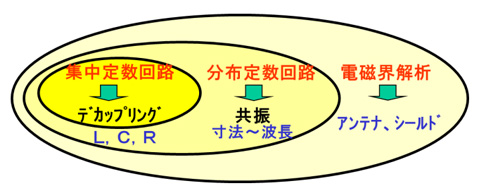
図9はスマートフォンのハードウェア設計に使用される技術を表している最初に図1でCPUのクロック周波数の年代変化を示したが、現在スマートフォンで使用されているクロック周波数は2GHz前後で、スマートフォンの無線通信のキャリア周波数を上回っている。そのため、センサやLSIなどの小型電子部品は集中回路で扱われるが、それらが搭載されたプリント基板は分布定数回路で扱われ、電波に関するアンテナと装置内の電磁干渉(EMC)は電磁界解析技術が使われる。