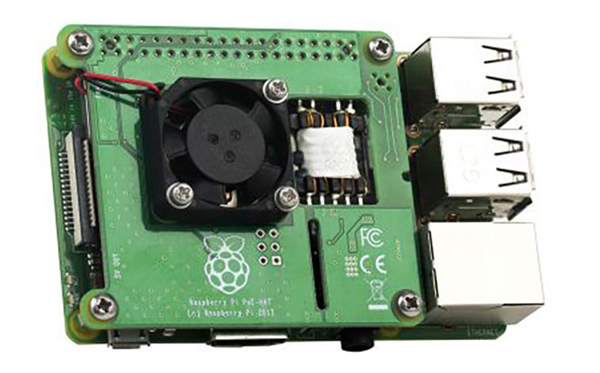
Raspberry Pi (ラズベリーパイ)の国内総代理店である アールエスコンポーネンツ株式会社は、「Raspberry Pi PoE HAT」の国内正式販売を明日(9月4日)より開始する。
「Raspberry Pi PoE HAT」(RS品番:173-5595)は、ラズベリーパイ最新モデルRaspberry Pi 3 Model B+用のPoE用拡張ボード。PoE(Power over Ethernet)とはイーサネットケーブルを通じて電力供給と通信を行う規格のことで、ACアダプタを使うことなくラズベリーパイに充分な電力を供給することが可能である。また、ボード中央にあるファンはラズベリーパイのプロセッサの温度を最適化し、安定動作を実現する。
Raspberry Pi は名刺サイズのシングルボードコンピュータで、子供向けのプログラミング教育から電子機器のプロトタイプや業務用システムのプラットフォームまで世界中の幅広い分野で利用されている。
1) K. Hotate, “Fiber distributed Brillouin sensing with optical correlation domain techniques,” Opt. Fiber Technol. 19, 700 (2013).
2) T. Kurashima, T. Horiguchi, H. Izumita, S. Furukawa, and Y. Koyamada, “Brillouin optical-fiber time domain reflectometry,” IEICE Trans. Commun. E76-B, 382 (1993).
3) Y. Mizuno, W. Zou, Z. He, and K. Hotate, “Proposal of Brillouin optical correlation-domain reflectometry (BOCDR),” Opt. Express 16, 12148 (2008).
4) Y. Mizuno, Z. He, and K. Hotate, “One-end-access high-speed distributed strain measurement with 13-mm spatial resolution based on Brillouin optical correlation-domain reflectometry,” IEEE Photon. Technol. Lett. 21, 474 (2009).
5) Y. Mizuno, N. Hayashi, H. Fukuda, K. Y. Song, and K. Nakamura, “Ultrahigh-speed distributed Brillouin reflectometry,” Light: Sci. Appl. 5, e16184 (2016).
6) H. Lee, N. Hayashi, Y. Mizuno, and K. Nakamura, “Slope-assisted Brillouin optical correlation-domain reflectometry: proof of concept,” IEEE Photon. J. 8, 6802807 (2016).
また、『第3回 再生可能エネルギーに関する日独ワークショップ』が、10月17日(水)-19日(金)に、TEPIAホール(港区北青山)にて開催される。
「PartII-Advanced Energy Technologies」では、環境省による5年間のプロジェクト(蓄熱プラント)に関する議論も行われる。