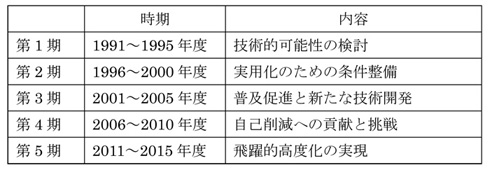
前回までで説明してきたのは主に車両の内部の状態を計測するセンサで、これらに対して車両外部の環境を認識するためのレーザレーダやカメラ(イメージセンサ)などのセンサをここではITS用センサと呼ぶこととする。ITS用センサを用いたシステムとしては走行支援のためのACCやLKAに加えて、最近では安全システムである衝突被害低減システムがあり、さらに将来の自動運転への適用も検討されている。これらのシステムについては国家プロジェクトである国土交通省によるASV(Advanced Safety Vehicle)プロジェクトにおいて自動車メーカ各社がプロトタイプカーを試作し、様々な検討が行われてきた。表3にASVの経緯を示す。現在は第5期までが終了している。これらの詳細については国土交通省のホームページを参照されたい7)。
主要なITS用センサでは外部環境情報を1次元もしくは2次元の検出素子アレイで取り込み、それらのデータを画像処理することで障害物や走路の認識を行っている。画像処理には高速演算が要求され、専用のASIC(Application Specific Integrated Circuit)やGPU(Graphics Processing Unit)が用いられている。またITS用センサは外部環境情報を得るために外界にさらす形で車体の表面に取り付ける必要があり、デザイン上や信頼性上の課題をクリアしていく必要がある。
以下では代表的なITS用センサであるレーザレーダ、ミリ波レーダ、カメラについて説明する。なお、赤外線カメラについては前回のMEMSセンサのところで赤外線イメージセンサという形で取り上げたのでここでは省略する。
表3 ASVプロジェクトの概要
4.1 レーザレーダ
レーザレーダは検出方向に存在する物体までの距離と方位を検出する装置で通常近赤外線の半導体レーザを用い、物体にレーザのパルス光を照射して反射光が戻ってくるまでの時間を計測して距離を求めるToF(Time of Flight)方式が用いられている。検出する物体の方位を求めるためにレーザ光をスキャナでスキャンし、計測を繰り返すことで反射光強度の方位分布を得ることができ、これにより画像処理を用いて検出物体のある程度の形状や大きさを求め、物体の識別を行うことができる。スキャナとしては電磁アクチュエータでミラーを駆動する1次元スキャナの他、ポリゴンミラーをモータで回転させる2次元スキャ二ングも用いられている。
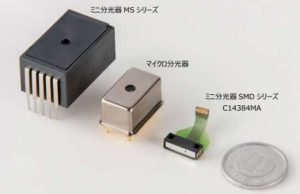 浜松ホトニクス株式会社は、10月23日、近赤外光に高い感度を持つ小型、軽量、低価格な
世界最小サイズ(当社調査)のグレーティング型分光器「ミニ分光器 SMD シリーズ
C14384MA」を新たに開発し、11月1日にサンプル出荷を開始すると発表した。従来のミニ分光器
MS シリーズと比べ、体積が約 40 分の 1、重さが約 30 分の 1、感度が約 50 倍を実現。現場での
リアルタイム測定が求められる食品、農作物の品質検査やドローンからの環境分析などの
用途として活躍が期待されている。
浜松ホトニクス株式会社は、10月23日、近赤外光に高い感度を持つ小型、軽量、低価格な
世界最小サイズ(当社調査)のグレーティング型分光器「ミニ分光器 SMD シリーズ
C14384MA」を新たに開発し、11月1日にサンプル出荷を開始すると発表した。従来のミニ分光器
MS シリーズと比べ、体積が約 40 分の 1、重さが約 30 分の 1、感度が約 50 倍を実現。現場での
リアルタイム測定が求められる食品、農作物の品質検査やドローンからの環境分析などの
用途として活躍が期待されている。  センスウェイ株式会社(本社:東京都中央区、代表取締役社長:神保雄三)と、センサーを置くだけで簡単に導入できるIoTセンサーサービスである「Webiot(ウェビオ)」を提供しているピクスー株式会社(本社:東京都墨田区 CEO:塩澤 元氣)が連携して、初期費用0円のLoRaWAN対応センサーサービスの提供を10月22日より開始することが
センスウェイ株式会社(本社:東京都中央区、代表取締役社長:神保雄三)と、センサーを置くだけで簡単に導入できるIoTセンサーサービスである「Webiot(ウェビオ)」を提供しているピクスー株式会社(本社:東京都墨田区 CEO:塩澤 元氣)が連携して、初期費用0円のLoRaWAN対応センサーサービスの提供を10月22日より開始することが スマートフォンの前の時代に、キーボードつきのスマートフォンを多く販売したBlackBerry社は「QNX」というセンサーの情報を統合して扱うソフトウエアを
スマートフォンの前の時代に、キーボードつきのスマートフォンを多く販売したBlackBerry社は「QNX」というセンサーの情報を統合して扱うソフトウエアを