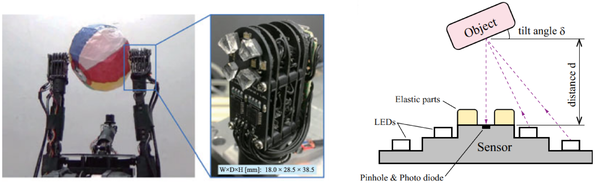
このほか近接距離センサとして、TOF(Time of Flight) 方式がある。その原理は、光の往復時間(Time of Flight)から対象物までの距離を測る方式である。小型軽量で反射率の影響を受けないため使い易い。製品例として17)、測定レンジは0~100mm、応答は15msのものがある。但し、距離誤差が2mm程度あり、近接距離での制御への利用は難しいだろう。このように空間拡張型の触覚センサは、一つの発展の方向性を示すものと考える。
(3)Pressure Profile Systems
電極間ギャップ距離の変化による静電容量変化から圧力を検出する方式である21)。原理は、弾性のある誘電体などを電極で挟み、電極間隔の変位による静電容量変化から圧力を検出する。薄型で構造が簡単、各種電極材料の利用が可能で設計の柔軟性があるなどの特徴がある。
11) R. Li, R. Platt Jr., W. Yuan, A. t. Pas, N. Roscup, M.A. Srinivasan,E. Adelson: Localization and manipulation of small parts using GelSight tactile sensing, IEEE/RSJ Int. Conf, on Intelligent Robots and Systems, pp.3988-3993, 2014. https://www.youtube.com/watch?v=w1EBdbe4Nes
12) A. Yamaguchi and C. G. Atkeson: Combining Finger Vision and Optical Tactile Sensing: Reducing and Handling Errors While Cutting Vegetables, IEEE-RAS Int. Conf. on Humanoid
Robots, pp.1045-1051, 2016.
13) E. Donlon, S. Dong, M. Liu, J. Li, E. Adelson, A. Rodriguez: GelSlim: A High-Resolution, Compact, Robust, and Calibrated Tactile-sensing Finger, arXiv:1803.00628, 2018.
14) 下条誠, 小山佳祐、計測自動制御学会、56(10), pp.758-763, 2017
15) D. Hughes, J. Lammie and N. Correll: A Robotic Skin for Collision Avoidance and Affective Touch Recognition, IEEE Robotics and Automation Letters, 3(3), pp.1386-1393, 2018
16) K. Koyama, M. Shimojo, T. Senoo, M. Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, 3(4), pp.3224-3231, 2018.
https://www.youtube.com/watch?v=UVMg2qdhdYs