(公財)野口研究所 学術顧問
§3 ハイブリッドホールIC
高感度磁気センサは薄膜ホール素子だけでは終わらなかった。更に、応用を拡げる事も、拡げやすくすることも必要であり、回路技術との組み合わせ、即ち、集積回路と磁気センサのハイブリッド集積による新規磁気センサ機能の実現も求められた。
3.1 デジタル出力のハイブリッドホールIC
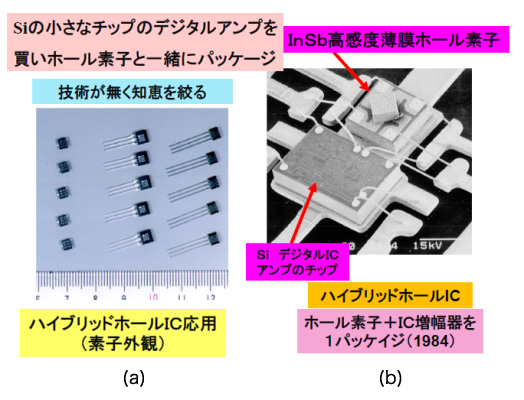
Fig.6 ハイブリッドホールIC、(a)樹脂パケージ製品、
このハイブリッドホールICは、磁気センサとして、非接触スイッチ、非接触センサとしてホール素子応用を大きく拡げた。更に、センサと集積回路のハイブリッド集積の有効性を示した例でもあった。
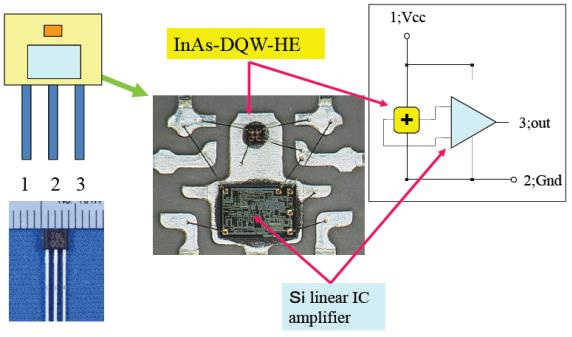
3.2 リニア―出力のハイブリッドホールIC
Fig.6 リニアハイブリッドホールIC、パッケージされたホール素子とSiのリニアアンプのイメージ(左上)、製品(左下写真)、InAsDQWホール素子のチップとSiの集積回路チップ(リニア増幅器)がワイヤー接続された写真(中央)、回路図のイメージ(右上の図)
§4 高感度薄膜ホール素子の応用と未来
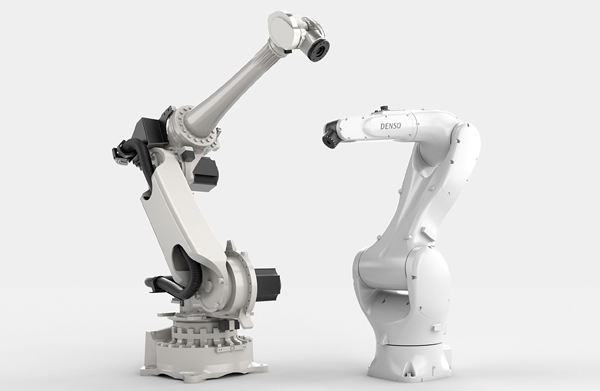
高感度薄膜ホール素子は、モータ応用と共に、非接触センサ、非接触スイッチとして、また、非接触の電流センサ等に広く使われており、快適な社会生活と地球環境を守る省電力化等にいまや大きく貢献している。以下、応用を紹介する。
Fig.8 身の回りで使われる高感度薄膜ホール素子の応用例
ところで、ホールモータは、回転子の電力消費や角速度制御によりブレーキロスの無い、本質的な省エネルギーモータである。国内の総発電量の50%以上は、動力モータが消費している。モータの省電力による発電所のCO2 排出や放射性廃棄物の削減は、環境負荷低減上極めて重要である。この為、家電製品やエアコン等の駆動モータのホールモータ化やインバータ駆動による省電力化が急速に進んでいる。特に、動力モータの省電力駆動に広く使われるインバータには、ホール素子を使う非接触電流センサが必須である。
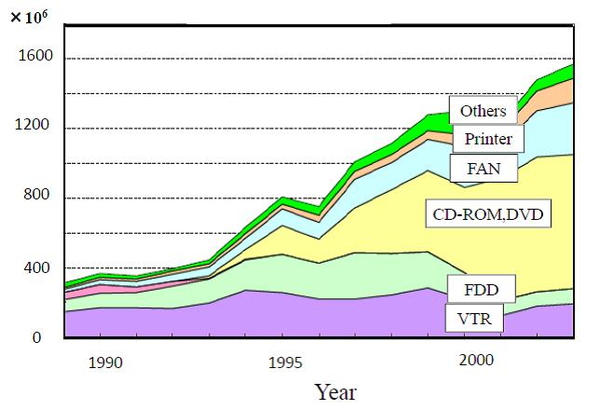
高感度薄膜ホール素子は、最大のモータ応用の他、電力分野の計測でも必須の非接触電流センサ、更に、非接触スイッチ、非接触センサ、普通車は勿論、HV、EV等の車載センサ等にも多数使われる。Fig.9には、高感度薄膜ホール素子の応用の年次推移の一部を示した。1997年以来、30年以上にわたり、毎年10億個を超えて使われてきた。2017年には史上最高の16億個、開発以来の累積では350億個を超えて使われ、応用は今も拡がる。
Fig.9 高感度薄膜ホール素子の応用の分野別年次推移
こうした事から、2014年、社会貢献の大きい電気技術を顕彰する、電気学会第7回「でんきの礎」顕彰では「電子制御モータを生んだ高感度InSb薄膜ホール素子」として顕彰された。
§5 まとめと未来への期待
21世紀は、世に言うAI、IoT時代である。高感度InSb薄膜ホール素子は、未来に向けて、磁気を利用した超小型の非接触センサを自由に使える時代を招来した。開発以来、VTRやPC等、時代を象徴する映像、電子情報産業の発展と普及、インターネットに象徴される豊かな情報化社会の実現を支援し、今も続く。
以上述べたような高感度薄膜ホール素子の研究開発は、強力な志と粘りで、多くの曲折と困難を乗り越え実用化する迄頑張ることが必要であった。キーワードは、
工学研究は、実用化し、社会で役立てることが目標である。研究開発では、若い人の出番がある。成功も失敗も挫折もある。困難は知恵を絞り乗り越えればよい。科学や技術は常に味方である。科学が足りなければ自ら創る。夢を決して忘れない事である。科学を創り、科学を応用(創理応用)が大切である。科学を大切にした研究が成功に道を拓く。失敗に学び、科学を見つけることが成功の基になる。若いセンサ研究者、技術者の皆さんに、【未来に向かって何を変えるか?】への挑戦を期待したい。
謝辞
【著者略歴】 柴﨑 一郎(しばさき いちろう)
■略歴
専門分野:化合物半導体薄膜技術と薄膜磁気センサ応用