両製品は、機械学習コアが内蔵のステート・マシン(FSM:Finite State Machine)と共に動作することで、歩数や衝突回数、回転数の計測といった単純な反復アルゴリズムをマイコンよりも低い消費電力で実行できます。FSMは、あらかじめ設定されたイベントの検出回数に達するか、設定された時間が経過すると、メイン・コントローラに信号を送る。
2.6. HOT化
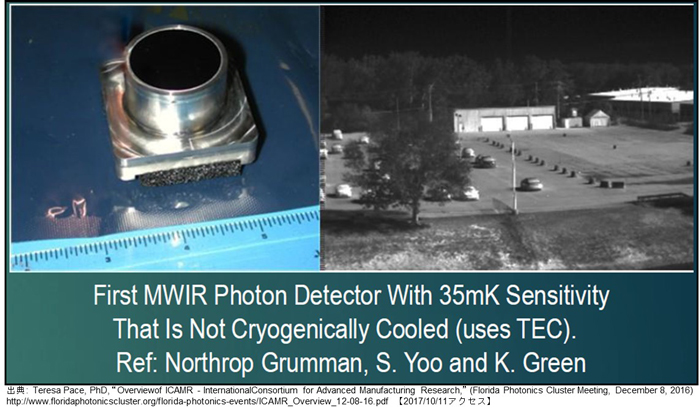
量子型の一般への普及を妨げる要因の一つとして極低温への冷却の必要性がある。クーラ分のSWaP(Size, Weight and Power、サイズ・重量・電力)の増大と、クーラMTTFに起因する保守とそれに伴うLCC(Life-Cycle Cost、ライフサイクル・コスト)の増大がネックとなる。
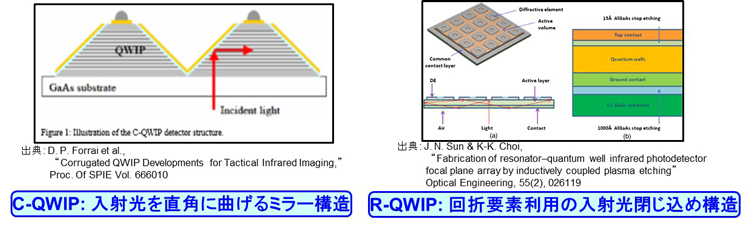
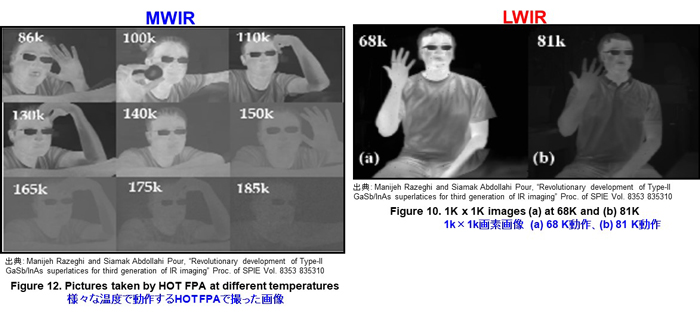
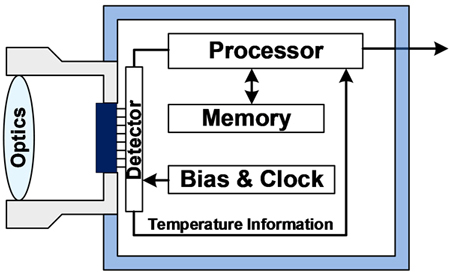
これを緩和する手段の一つとしてHOT(High Operating Temperature、高動作温度)化がある。検知素子温度を下げなければならない理由は検知素子自体の温度に応じて生ずる熱電子を抑圧する必要があるからであるが、それを検知素子構造で抑圧することが取り組まれている。熱電子が流れることを阻止する障壁層を組込む取組みである(図26)21)。
液体窒素温度に冷却するもののMTTF(Mean Time To Failure、平均故障時間)が数千時間だったのが、クーラ自体の長寿命化と相俟って数万時間が比較的広く見られ、現在、25万時間を目指すプロジェクトが進められている。
PbSやPbSeは赤外線センサ黎明期に肩撃ち式ミサイルのシーカに使われていた検知素子材料である。当時は単素子センサに光学的な目標方向検出手段を組合せて使っていたが、高性能の凝視型センサとして復活させようというものである。PbSやPbSeは極低温冷却が不要という大きな利点を持っており、DARPA(Defense Advanced Research Projects Agency、国防高等研究計画局)のWIREDプログラムの下で開発が進められている(図28)23)。
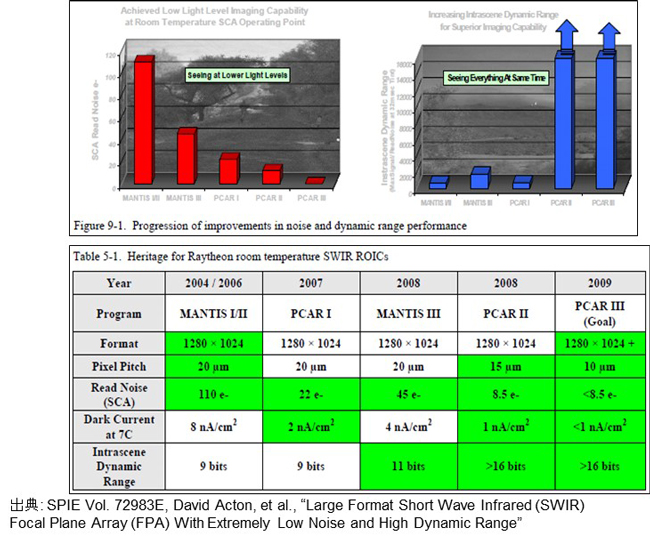
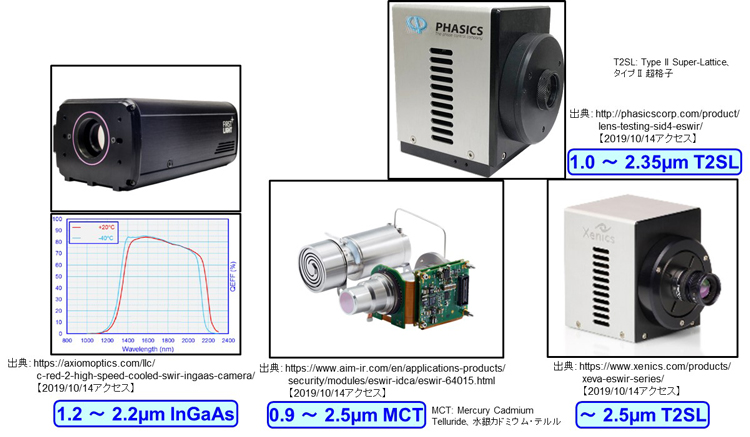
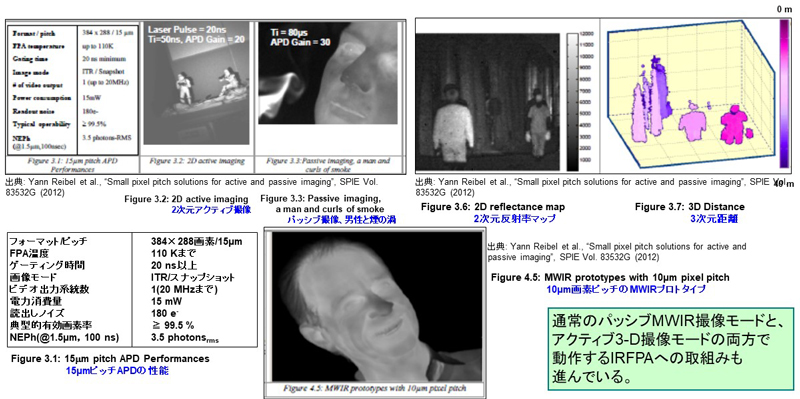
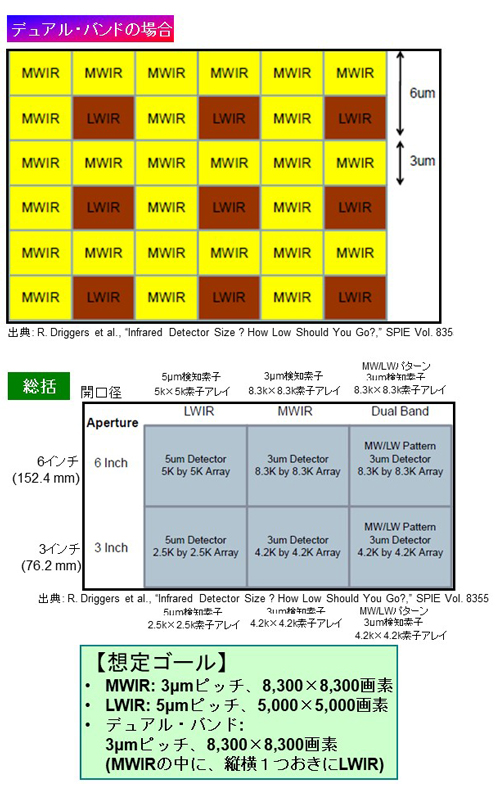
参考文献 5) D. Acton et al., “Large Format Short Wave Infrared (SWIR) Focal Plane Array (FPA) With Extremely Low Noise and High Dynamic Range,” Proc. of SPIE Vol. 72983E (2009) 11)https://axiomoptics.com/llc/c-red-2-high-speed-cooled-swir-ingaas-camera/ 12)https://www.aim-ir.com/en/applications-products/security/modules/eswir-idca/eswir-64015.html 13)http://phasicscorp.com/product/lens-testing-sid4-eswir/ 14)https://www.xenics.com/products/xeva-eswir-series/ 15) Y. Reibel et al., “Small pixel pitch solutions for active and passive imaging,” Proc. of SPIE Vol. 83532G (2012) 16) R. Driggers et al., “Infrared Detector Size – How Low Should You Go?” Proc. of SPIE Vol. 83550O (2012) 17) D.P. Forrai et al., “Corrugated QWIP Developments for Tactical Infrared Imaging,” Proc. of SPIE Vol. 666010 (2007) 18) J.N. Sun & K-K. Choi, “Fabrication of resonator-quantum well infrared photodetector focal plane array by inductively coupled plasma etching,” Opt. Eng. 55 (2), 026119 (2017) 19) N.K. Dhar & R. Dat, “Advanced Imaging Research and Development at DARPA,” Proc of SPIE Vol. 835302 (2012) 20) M. Balckwell et al., “Digital ROIC developments,” Proc. of SPIE Vol. 10170Z (2017) 21) M. Razeghi & S.A. Pour, “Revolutionary development of Type-II GaSb/InAs superlattices for third generation of IR imaging,” Proc. of SPIE Vol. 835310 (2012) 22) A.J. Ciani et al., “Colloidal quantum dots for low-cost MWIR imaging,” Proc. of SPIE Vol. 981919 (2016) 23) T. Pace, “Overview of ICAMR – International Consortium for Advanced Manufacturing Research,” Florida Photonics Cluster Meeting, Dec. 8, 2016
参考文献 6) Y. Kosasayama, T. Sugino, Y. Nakaki, M. Ueno, and K. Kama : The Japan Society of Infrared Science and Technology, The 49th meeting, Feb., 2008. 7) T. Ohnakado, M. Ueno, Y. Ohta, Y. Kosasayama, H. Hata, T. Sugino, T. Ohno, K. Kama, M. Tsugai, and H. Fukumoto : Proc. SPIE Vol. 7298, 72980V, 2009. 11) D. Fujisawa, Y. Kosasayama, T. Takikawa, H. Hata, T. Takenaga, T. Satake, K. Yamashita and D. Suzuki : Proc. SPIE, Vol. 10624, 1062421, 2018.
2013年にオバマ政権が立ち上げたBrain Initiativeという大型研究プロジェクトの後押しを受け,2010年代からfNIRS研究は全世界規模で加速している。2010年にはfNIRS関連の論文発表は週1報ペースであったが,2020年は日に1報のペースとなっている。”Society for fNIRS(SfNIRS)”という国際学会も定着し,その公式ジャーナルであるNeurophotonicsのインパクトファクターは4を超えている。SfNIRSはソーシャルメディアの活用が進んだ比較的オープンな学会である。なお,2020年度の大会は10月にボストンで開催される。筆者は共同大会長としてプログラムの選定にあたっているが,すべての講演を1会場で聞け,見逃したポスターも電子閲覧できるという工夫を凝らしている。fNIRSの今を知るための最も効率のよい手段として,活用してみてはいかがであろうか。
1) M. Ferrari, V. Quaresima, A brief review on the history of human functional near-infrared spectroscopy (fNIRS) development and fields of application, Neuroimage 63, 921-35 (2012) 18) D. Tsuzuki, I. Dan, Spatial registration for functional near-infrared spectroscopy: from channel position on the scalp to cortical location in individual and group analyses, Neuroimage, 85, 92-103 (2014) 19) S. Sutoko et al. Tutorial on platform for optical topography analysis tools, Neurophotonics, 3, 010801 (2016) 20) C.M. Aasted et al., Anatomical guidance for functional near-infrared spectroscopy: AtlasViewer tutorial, Neurophotonics, 2, 020801(2015) 21) S. Tak et al., Sensor space group analysis for fNIRS data, J. Neurosci. Methods, 264, 103-112 (2016) 22) J. Hudak et al., Near-infrared spectroscopy-based frontal lobe neurofeedback integrated in virtual reality modulates brain and behavior in highly impulsive adults, Front. Hum. Neurosci., 11, 425 (2017) 23) Network review. L. Heine et al., Resting state networks and consciousness, Front. Psychol., 27, 00295 (2012) 24) F. Homae et al., Development of global cortical networks in early infancy, J. Neurosci., 30, 4877-82 (2010) 25) Y. Minagawa et al., Toward interactive social neuroscience: Neuroimaging real‐world interactions in various populations, Jap. Psychol. Res., 60, 196–224 (2018) 26) T. Koide and S. Shimada, Cheering enhances inter‐brain synchronization between sensorimotor areas of player and observer, Jap. Psychol. Res., 60, 265–275 (2018) 27) P. Pinti et al., A review on the use of wearable functional near‐infrared spectroscopy in naturalistic environments, Jap. Psychol. Res., 60, 347–373 (2018) 28) 国立研究開発法人情報通信研究機構. 米国における脳情報関連技術に関する研究開発動向, https://www.nict.go.jp/global/lde9n2000000bmum-att/a1525652348170.pdf (2020年2月24日閲覧)
Functional neuroimaging using fNIRS: from “spectroscopy” to “imaging”
Ippeita Dan
Professor, Applied Cognitive Neuroscience Laboratory, Faculty of Science and Engineering, Chuo University