この度の新型コロナウイルスの世界的な大流行を受け、同社のシンガポール子会社(Doog International Pte. Ltd)では、シンガポール行政機関から荷物運搬用途での貸出要請を受けており、現在関係機関と調整を行っているとのこと。また、並行して公衆衛生・予防対策のプロジェクトからの要請で消毒薬噴霧散布ロボットを準備した。このロボットは、様々な使い方がかあるが、以前より同社で展開している協働運搬ロボットのサウザーシリーズを噴霧散布用途としてカスタマイズしたもの。
これらの新しいイメージ・センサのサイズは、VD55G0(640 x 600ピクセル)が2.6 x 2.5mm、VD56G3(1124 x 1364ピクセル)が3.6 x 4.3mmで、いずれも同等の解像度を持つ製品としては最小クラス。また、近赤外を含むすべての波長でピクセル間のクロストークが低いため、高コントラストできわめて鮮明な画像を得ることができる。VD56G3はオプティカル・フロー処理機能を搭載しているため、ホスト・コンピュータによる移動ベクトルの計算処理が不要。両製品とも、拡張・仮想現実(AR/VR)、SLAM(Simultaneous Localization and Mapping)、3Dスキャニングなど、幅広いアプリケーションに最適とのこと。
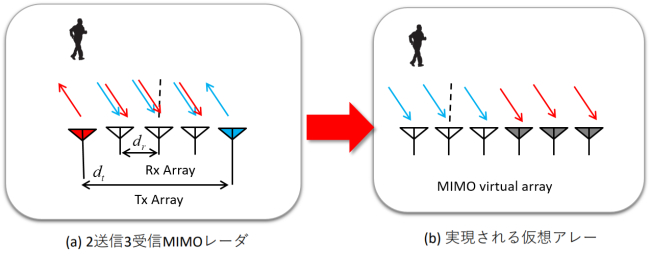
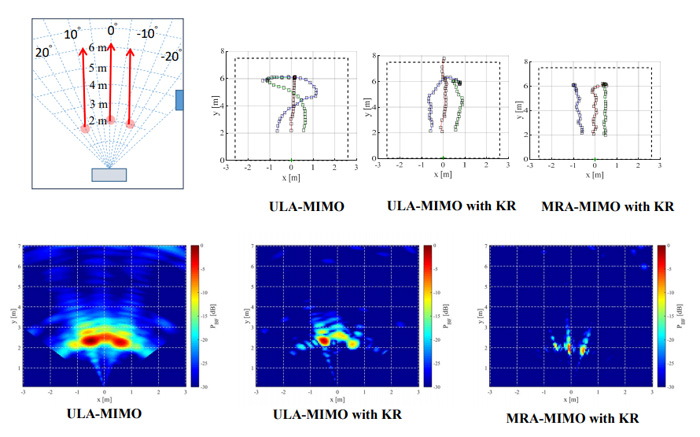
屋内における人物位置推定実験結果を通して、このMIMOレーダの能力を示そう。屋内で3人が並んでレーダ近傍(距離2m)から遠方(6m)程度まで移動した際のレーダイメージング動画とカルマンフィルタによる追尾結果を図2に示した。ここでは中心周波数76.5GHz, 帯域幅500MHzのMIMOレーダを用いており、壁や什器からの不要反射波を抑圧するためMIT (Moving Target Indicator)処理を施している。同図の”ULA-MIMO”が2送信4受信の等間隔配列のMIMOレーダ、”ULA-MIMO with KR”がそのデータに対して上述のKhatri-Rao仮想アレー処理を施したもの、”MRA-MIMO with KR”は受信アレーアンテナを不等間隔とした際の結果である。それぞれ、8素子、15素子、39素子相当のアレーアンテナで角度分離を実現しており、この程度のハードウェア規模でも屋内人物の位置推定、トラッキングは十分実現可能であることがわかる。
参考文献 1) J. Li and P. Stoica, MIMO radar signal processing, Wiley, 2009 2) 例えば、S.Qin, et al, “Generalized Coprime Array Configuration for Direction-of-Arrival Estimation,” IEEE Trans. Signal Process., vol.63, no.6, pp.1377-1390, Mar. 2015. 3) 例えば、W.K.Ma, et al, “DOA Estimation of Quasi-Stationary Signals with Less Sensors than Sources and Unknown Spatial Noise Covariance: A Khatri-Rao Subspace Approach,” IEEE Trans Signal Process., vol.58, no. 4, pp.2168-2180, Apr. 2010. 4) Y. Wakamatsu, H. Yamada, Y. Yamaguchi, “MIMO Doppler Radar Using Khatri-Rao Product Virtual Array for Indoor Human Detection,” IEICE Trans. Communications, Vol.E99-B, No.1, pp.124-133, Jan. 2016. 5) J. Konishi, H. Yamada, Y. Yamaguchi, “Optimum element arrangements in MIMO radar using Khatri-Rao product virtual array processing,” IEICE Communications Express, vol. 7, no.11, p. 407-414, Nov. 2018. 6) 例えば、大内和夫著、リモートセンシングのための合成開口レーダの基礎、東京電機大学出版局、2004年
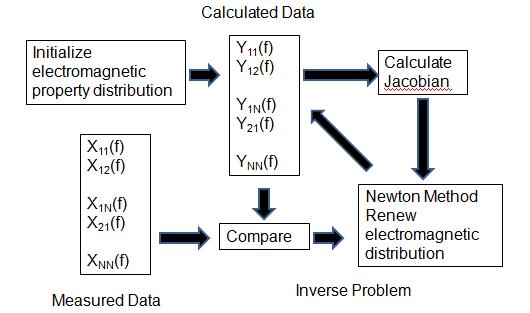
D (∝CN×3M)は、現時点での比誘電率と導電率分布において、あるボクセルの比誘電率や導電率を変化させた時、受信信号に現れる変化を表す感度行列(ヤコビアン)、+は行列やベクトルの共役転置を表す。行列の次元が3Mになっているのは、x、y、zの3方向の電磁界を考えなければならないからである。[ ]の逆行列計算を解くため、次のチーホノフの正則化を適用する。
ここで I (∝C3M×3M) は単位行列、gは正則化係数である。これらの処理を繰り返し実行し、Δτk のノルムがある程度小さくなったとき、処理を打ち切る。このときのτkが再構成画像となる。
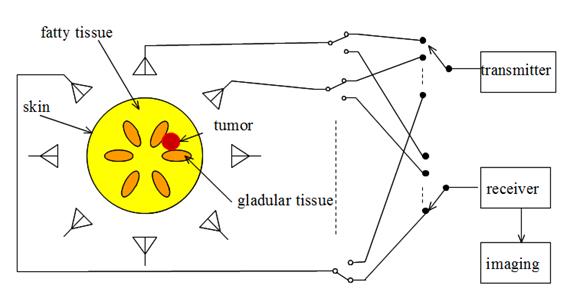
a. シミュレーションモデルで得た受信応答を、実際の撮像装置で得られる受信応答と完全に一致させなければならない。この実現は、マイクロ波帯では極めて困難である。 b. mmオーダーの分解能を得るため、数千から数万のボクセルで乳房をモデル化するので、未知数の数は1つの周波数で数万に達する。一方、実際に得られる測定データの数は、N素子のアンテナではN(N-1)/2である。アンテナの大きさは使用周波数で決定され、SNRの確保を考慮すると使用周波数は低いほうが望ましいが、アンテナが大きくなる。このとき乳房の周りに多くのアンテナを配置することはできない。逆散乱トモグラフィは未知数よりはるかに少ない観測データで未知数を求める不適切問題である。不適切問題を正確に解くことは困難である。 c. 受信アンテナは小さなボクセルの複素誘電率の変化に帰する散乱波の変化を検出できなければならず、高利得が必要である。
これらの課題を解決する方法については後で述べる。
次回に続く-
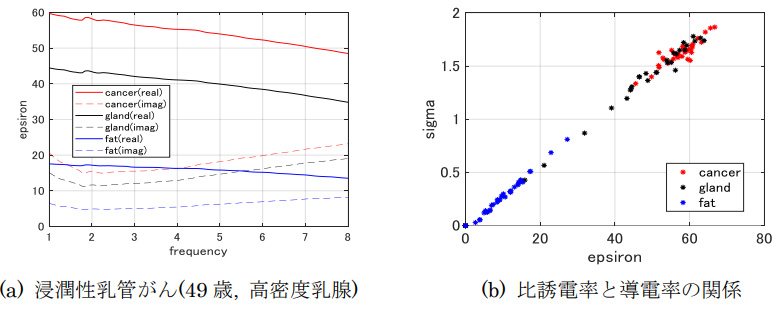
参考文献 1) C. D. Lehman, C. Isaacs, M. D. Schnall, E. D. Pisano, S. M.Accher, P. T. Weatherall, D. A. Bluemke, D. J. Bowen, P. K. Marcom, D. K. Armstrong, S. M. Domchek, G. Tomlinson, S. J. Skates, and C. Gatsonis, “Cancer Yield of Mammography. MR, and US in High Risk Women,” Radiology, Vol.224, no.2, pp.381-388, 2007. 2) Kuwahara,” New Perspectives in Breast Imaging,- Microwave Imaging for early breast cancer detection” ISBN 978-953-51-5553-9, Intech, 2017 3) M. Lazebnik, L. McCartney, D. Popovic, C. B. Watkins, M. J. Lindstorm, J. Harter, S. Sewall, A. Magliocco, J. H. Brooske, M. Okoniewski, and S. C. Hagness, “A large scale study of the ultra wideband microwave dielectric properties of normal, benign, and malignant breast tissues obtained from cancer surgeries,” Phys. Med. Biol., Vol.52, no.20, pp.6093-6115, 2007. 4) D. M. Hagl, D. Popovic, S. C. Hagness, J. H. Booske, M. Okoniewski, “Sensing Volume of Open-Ended Coaxial Probes for Dielectric Characterization of Breast Tissue at Microwave Frequencies,” IEEE Trans. on Microwave Theory and Techniques, vol.51, No.4, pp.1194-1206, 2003. 5) T. M. Grzegorczyk, P. M. Meaney, P. A. Kaufman, R. M.diForio-Alexander, and K. D. Paulsen, Fast 3D Tomographic Imaging for Breast Cancer Detection, IEEE trans on Medical Imaging, Vol.31, No.8, pp.1584-1592, 2012. 6) M. S. Nepote, T. Reiner, and S. Pistrius,”An Air Operated Bistatic System for Breast Microwave Radar Imaging: Pre-Clinical Validation,” Proc. of EMB2019, 2019. 7) A. Fasoula, B. M. Moloney, L. Duchenene, J. D. Gil Cano, B. L. Oliveria, J-G. Bernard, and M.J. Kerin, “Super resolution radar imaging for breast cancer detection with microwaves: the integrated information selection criteria,” Proc. of EMB2019, 2019. 8) M. Sarafianou, I. J. Craddock, T. Henriksson, M. Klemm, D.R. Gibbins, A.W. Preece, J. A. Leendertz, R. Benjamin, “MUSIC Processing for Permittivity Estimation in a Delay-And-Sum Imaging System,” Proc. of 2013 EUCAP, 2013. 9) Essex J. Bond, Xu Li, Susan C. Hagness, and Barry D. Van Veen, “Microwave Imaging via Space-Time Beamforming for Early Detection of Breast Cancer,” IEEE Trans. on Antennas and Propagation, VOL. 51, NO. 8, pp. 1690-1705, 2003. 10) Y. Xie, B. Gio, L. Xu, J. Li, and P. Stoica, “Multistatic Adaptive Microwave Imaging for Early Breast Cancer Detection,” IEEE Trans. on Biomed. Eng. Vol.53, No.8, pp.1647-1657, 2006. 11) D. Hossain, A. S. Mohan, and M. J.Abedin, “Beamspace Time- Reversal Microwave Imaging for Breast Cancer Detection,” IEEE Antennas and Wireless Propagat. Letters, Vol.12, pp.241-244, 2013. 12) D. Flores-Tapia and D. Rodrigues, “Experimental feasibility of multistatic holography for breast microwave radar image reconstruction,” Med. Phys. 43(8), pp.4674-4686, 2016. 13) J D. Shea, P. Kosmas, V. Veen and S. C. Hagness, “Contrast-enhanced microwave imaging of breast tumors: a computational study using 3D realistic numerical phantoms”, Inverse Problem 26 074009, 2010.
参考文献 1) K. Kawase, Y. Ogawa, Y. Watanabe and H. Inoue, : Optics express, 11(2003), 2549-2554. 2) 深澤 亮一「分析・センシングのためのテラヘルツ波技術」日刊工業新聞社 3) J.L. Hesler et al.: in Proc. 18th Int. Symp. Space Terahertz Techn(Pasadena, 2007) 4) E.R. Brown et al.: in Proc. SPIE, 6212, 621205(2006) 5) Z. Zhang, et al., : IEEE Microw. Wireless Compon. Lett., 21(2011)267-269 6) B, Assim, et al.: “A Low-Noise CMOS THz Imager Based on Source 7) Modulation and an In-Pixel High-Q Passive Switched-Capacitor n-Path Filter”, Sensors, 16, 3, p.325(Mar. 2016) 8) A.H. Richard, et al.: “A 1 k-pixel Video Camera for 0.7-1.1 Terahertz Imaging Applications in 65-nm CMOS”, JSSC, 47, 12, pp.2999-3012(Dec. 2012) 9) K.D. Yeon, et al.: “Design and Demonstration of 820-GHz Array using Diode-Connected NMOS Transistors in 130-nm CMOS for Active Imaging”, IEEE Trans. Terahertz Science and Technology, 6, 2, pp.306-317(Mar. 2016) 10) S. Kiryong, et al.: “A CMOS 300-GHz 7 by 7 detector array for THz imaging”, RFIT, Sep. 2017) 11) H. Kojima, D. Kido, H. Kanaya, H. Ishii, T. Maeda, M. Ogura and T. Asano: “Analysis of square-law detector for high-sensitive detection of terahertz waves”, Journal of Applied Physics, 125, 17, 174506(2019)