広島国際大学 健康科学部 心理学科
5 結果
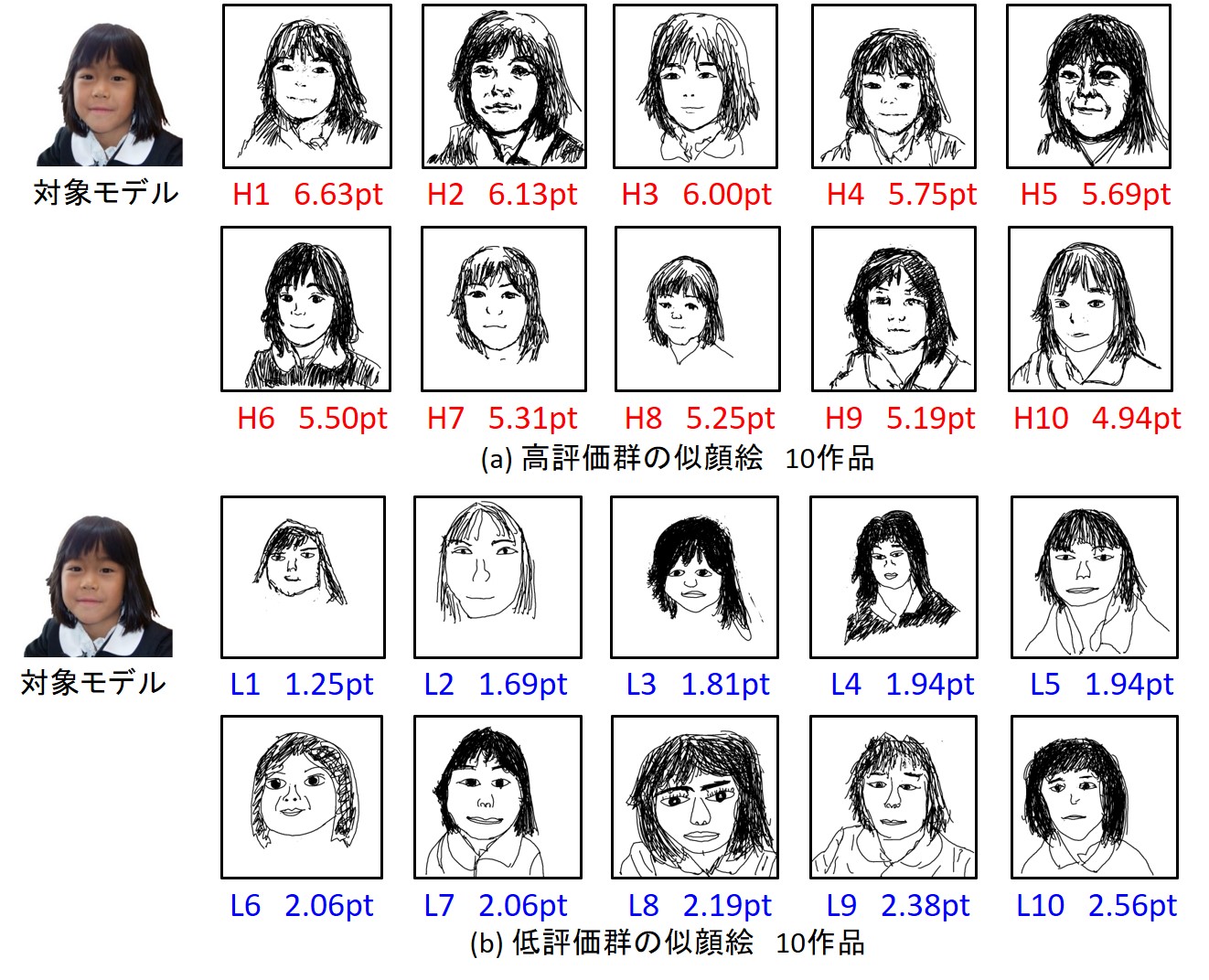
図2に、アンケートによって順位付けした高評価群(1~10位の10作品)と、低評価群(31~40位の10作品)を示す。図2(a) は高評価群、図2(b) は低評価群の各10作品である。図2(a)の H1, H2・・・, H10は、最も評価の高いものから1位、2位・・・10位、図2(b)のL1, L2・・・, L10は、最も評価の低いものから1位、2位・・・10位と順位を付けている。ただし、図2(b)のL4とL5、L6とL7は同点であるが便宜上順位を付いている。また図内の評価得点は、上手で似ているものは7点、下手で似ていないものは1点となるように、8名のアンケートの評価結果を平均した。図2より、高評価群は4.9点以上の評価得点であるのに対して、低評価群は2.6点以下になっており、上手な絵と下手な絵が分類できているといえる。
図2 専門家のアンケートによって選出した高評価群と低評価群の似顔絵
図2より、高評価群の10名はすべて左髪のハネなどの特徴を捕えている。さらに、描画対象モデルを忠実に模写するために、全体のバランスおよび、顔のパーツやそれらの相対的な位置関係が、対象モデルと同様になるように描いていることがわかる。
一方、低評価群の似顔絵は、対象モデルと比べ極端に大きいものや小さいものが見られる。また、左髪のハネなどの特徴を捕えているものが少なく、描画対象モデルの観察が不十分であることが伺える。
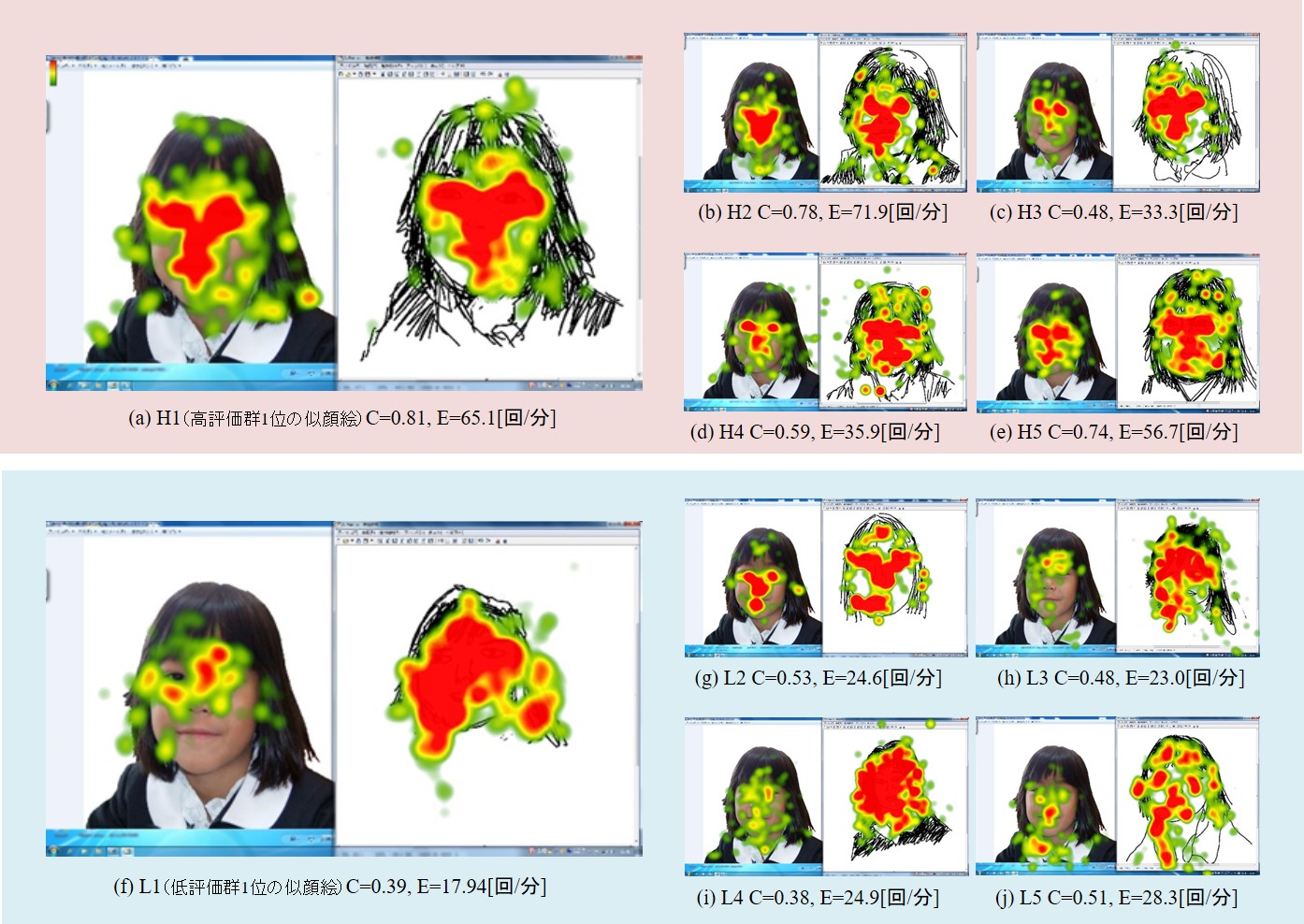
図3 高評価群(上位5作品)、低評価群(下位5作品)の似顔絵描画時の注視時間(Heat map)
図4(a)~(e)に高評価群、図4(f)~(j)に低評価群の各5作品における似顔絵描画時の停留点とその軌跡(Gaze plot)を示す。図内のC, Eは図3と同様である。図4(a)~(e)と図4(f)~(j)を比較すると、高評価群の平行に移動する停留点の軌跡の本数は、低評価群のそれらよりも多いことがわかる。さらに、代表例として図4(a)と(f)を見比べると、高評価群は描画対象モデルとそれに対応する似顔絵上のみに停留点があるのに対して、低評価群では、似顔絵描画に関係ない位置に停留点があることが確認できる。このことから似顔絵が下手な人は、描画中に注意力が散漫になり、集中力が欠損したと考えらえる。
図4 高評価群および低評価群(各5作品)の似顔絵描画時の停留点とその軌跡(Gaze plot)
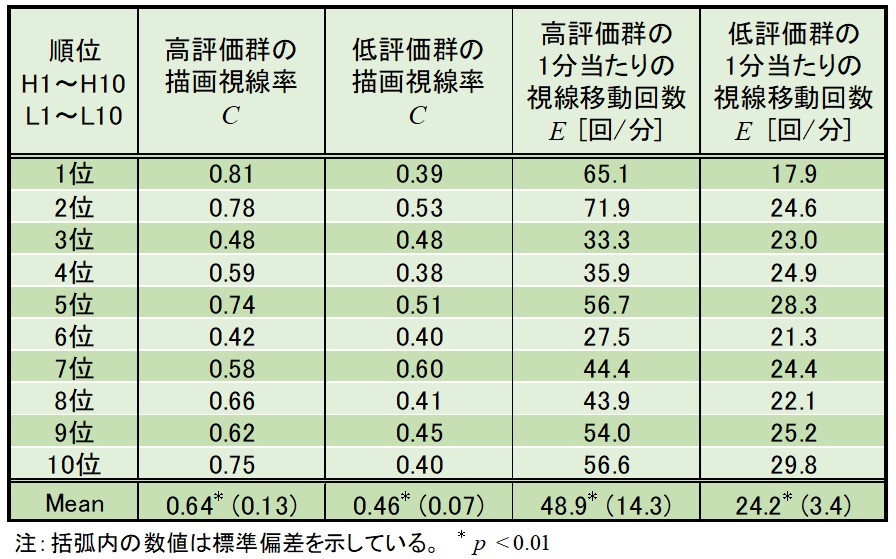
これらの結果を定量評価するため、描画視線率Cおよび、似顔絵描画時の対象モデルと描画キャンバス上の似顔絵間の1分あたりの平行な視線移動回数Eを用いて分析する。表1に、高評価群と低評価群の各1~10位の似顔絵における、描画視線率Cおよび1分あたりの視線移動回数Eを示す。t =3.99, df =14, p <0.01)よって、似顔絵の上手な人は下手な人と比べて、無駄な視線の動きが少ないことを数値として示している。
表1 高評価群および低評価群の描画視線率Cと1分当たりの視線移動回数E
さらに、高評価群10作品の似顔絵における1分あたりの視線移動回数Eの平均値は48.9 [回/分](SD 14.3)であり、こちらも低評価群10作品の平均値24.2 [回/分](SD 3.4)より2倍以上大きくなっていることがわかる。またこの両者の間にも、統計的に有意な差を確認した。(t =5.32, df =10, p <0.01)この1分あたりの視線移動回数Eは、描画対象モデルと似顔絵を交互に見比べる回数であることから、似顔絵の上手な人は似顔絵の下手な人に比べて、描画対象モデルを繰り返し十分に観察し、輪郭およびパーツの特徴や相対的位置関係を獲得し、少しずつ確認・修正しながら描いている。さらに、似顔絵の下手な人は、頭の中にあるパーツのイメージや固定観念によって描くため、1分あたりの視線移動回数Eの値が小さくなることが示された。
6 おわりに
この研究事例では、以下の4つの知見を獲得した。
(1) 似顔絵の上手な人は似顔絵の下手な人に比べて、描画対象モデルを全体的に捉え、集中して繰り返し十分に観察しながら描く。
(2) 似顔絵の上手な人は、輪郭およびパーツの特徴やそれらの相対的位置関係を獲得し、模写の要領で少しずつ確認・修正を繰り返しながら描く。
(3) 似顔絵が下手な人は、約7分の描画時間において注意力が散漫になり、集中力が欠損する傾向がある。
(4) 似顔絵が下手な人は、輪郭や左髪のハネなど、見落としている特徴が多い。(よく観察し特徴を捉えることが上手になるための第一歩である。)2) は、絵を上手に描くポイントとして「とにかくよく見て描く」「モチーフの細部を集中して観察する」ことを述べている。また、B. Edwards3) も、写実的に描く方法として「既成概念を捨てて集中して見たままを描く」ことを述べている。
参考文献
2) 誰でもすぐに絵が上手くなる 魔法の塗り絵 Vol.1,小野日佐子,神宮館, (2014).
3) “Drawing on the Right Side of the Brain: The Definitive, 4th Edition”, Betty Edwards, Penguin Group Inc., (2012).
【著者紹介】 大西 厳 (おおにし げん)
■略歴
■専門分野