(株)CambrianRoboticsは、クラウド上でプログラミングできるUSBタイプのIoTゲートウェイ「obniz BLE Stick」の販売を開始した。
■ obniz BLE Stickについて
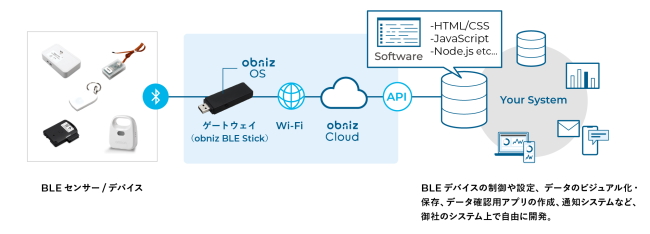
「obniz BLE Stick」は、Bluetooth Low Energy(以下、BLE)を採用したセンサ製品と接続し、さまざまなデータを「obniz Cloud(オブナイズクラウド)」で管理できるIoTゲートウェイ。
obniz BLE Stickには、同社開発のobnizOSが搭載されている。BLEの連携に必要なファームウェアやプログラムは全てobniz Cloudに集約。クラウド上にJavaScriptでプログラムを行うことで、BLEデバイス・対応センサ製品の制御ができる。BLEアドバタイズのスキャンはもちろん、複数機器との同時接続や接続とスキャンの両立など、あらゆることをクラウドでプログラム可能。
ゲートウェイ自体をプログラムする必要がないため、デバイスの追加や変更、サービスやキャラクタリスティクスの操作など、個々のゲートウェイのファームウェアを書き換える必要は無い。初期開発はもちろん、運用開始後の仕様変更も容易で、クラウド側で変更・修正を行えば、すぐに全機器に反映することができるという。
注1:RaaS
先端システム技術研究組合の英語名のResearch Association for Advanced Systemsの頭文字を繋げて作った略語。 半導体を部品(製品)としてではなく、 システムの中核知識(サービス)として提供することを標榜し、 サービスとしての研究(Research as a Service)のようにラースと読む。
8) S. Izumi, T. Okano, D. Matsunaga, H. Kawaguchi, and M. Yoshimoto, “Non-contact Instantaneous Heart Rate Extraction System Using 24-GHz Microwave Doppler Sensor,” IEICE Transactions on Communications, vol. E102-B, no. 6, pp. 1088-1096, June 2019.
9) K. J. Lee, C. Park, and B. Lee, “Tracking driver’s heart rate by continuous-wave Doppler radar,” Proc. of IEEE EMBC 2016, pp. 5417-5420, Aug. 2016.
10) S. Yoshida, S. Izumi, K. Kajihara, Y. Yano, H. Kawaguchi and M. Yoshimoto, “Energy-Efficient Spectral Analysis Method Using Autoregressive Model-Based Approach for Internet of Things,” IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 66, no. 10, pp. 3896-3905, Oct. 2019.
11) K. Watanabe, S. Izumi, Y. Yano, H. Kawaguchi, M. Yoshimoto, “Heartbeat Interval Error Compensation Method for Low Sampling Rates Photoplethysmography Sensors,” IEICE Transactions on Communications, vol. E103-B, no.6, pp.645-652, June 2020.
12) V. L. Petrović, M. M. Janković, A. V. Lupšić, V. R. Mihajlović and J. S. Popović-Božović, “High-Accuracy Real-Time Monitoring of Heart Rate Variability Using 24 GHz Continuous-Wave Doppler Radar, ” IEEE Access, vol. 7, pp. 74721-74733, 2019.
13) J. S. Arteaga-Falconi, H. Al Osman and A. El Saddik, “ECG Authentication for Mobile Devices,” IEEE Trans. Instrumentation and Measurement, vol. 65, pp. 591–600, Mar. 2016.
14) T. Okano, S. Izumi, H. Kawaguchi,and M. Yoshimoto, “Non-Contact Biometric Identification and Authentication Using Microwave Doppler Sensor,” Proc. of IEEE BioCAS, pp. 392–395, Oct. 2017.
4 Person-Specific Heart Rate Estimation With Ultra-Wideband Radar Using Convolutional Neural Networks, Shuqiong Wu et. Al., IEEE Access, November 2019
5 Is 50 Hz high enough ECG sampling frequency for accurate HRV analysis?, Shadi Mahdiani, 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), August 2015
機械学習の高い専門性を持つSTの認定パートナー企業であるCartesiam社と共同開発したFP-AI-NANOEDG1ソフトウェア・パッケージには、センサ・データの収集や統合、およびCartesiam社の機械学習ライブラリ生成ツールであるNanoEdgeライブラリを実行するドライバ、ミドルウェア、ドキュメント、サンプル・コードがすべて含まれる。
機械学習に関する専門的なスキルを持たないユーザでも、Windows® 10またはUbuntu PCで動作するCartesiam社のAI開発環境「NanoEdge™ AI Studio」を使用することで、アプリケーションに応じた機械学習ライブラリを短期間で作成し、エクスポートできる。また、FP-AI-NANOEDG1は無償で利用することができ、STM32マイコン開発ボード上で包括的な試作開発と検証を簡単に行うことができる。ユーザのハードウェアへの実装には、Cartesiam社の標準的な料金が適用されるとのこと。
Cartesiam社と協力して確立したシンプルな手法により、STM32L562E-DKなどのSTM32マイコン開発ボードに搭載された産業グレードのセンサを使用して、監視対象の機器から通常動作と異常状態双方の振動データを取り込むことが可能。FP-AI-NANOEDG1には、センサ・データを設定して取り込むためのソフトウェアが含まれている。NanoEdge AI Studioはベンチマーク・データを分析し、5億通り以上の組み合わせから事前コンパイル済みアルゴリズムを選択して、学習と推論用に最適化されたライブラリを作成する。
FP-AI-NANOEDG1ではライブラリ用のスタブが提供され、アプリケーションに組み込む際に簡単に置き換えられる。また、学習モードと監視モードの切り替えができるため、導入後に動作モードの通常パターンを初期インストール段階と機器の耐用期間においてローカルで学習することも可能という。
NECは(株)FiNC Technologies(以下、FiNC)と共同開発を行った歩行センシングインソール「A-RROWG」プロジェクトにおいて、「Makuake Of The Year 2020」を受賞した。
「A-RROWG」はNECが初めて挑戦したMakuakeプロジェクトであり、初めての「Makuake Award」受賞となる。