
ガーディアンロボットプロジェクト
川西 康友
1. はじめに
理化学研究所ガーディアンロボットプロジェクト(以下理研GRP)では,高齢者の生活を見守るロボットを応用として,人に寄り添い,一緒に暮らす人がロボットにこころを感じられるようなロボットの実現を目指した研究をしている[1, 2].
現在,人の生活に入り込んでいるロボットのうち最も代表的なものは,掃除ロボットである.掃除ロボットは自律的に部屋の中を移動し,掃除をする.我々は,このような道具としてのロボットではなく,家族の一員のように一緒に暮らせるロボットの実現を狙っている.そのためには,自律的な移動機能,対話機能に加え,人がロボットに対してこころを感じられることが望ましい.そこで,我々はこころのメカニズムの解明及びロボット実装を通じて,こころを感じられるロボットの実現に向けて研究をしている.
我々は,ロボット実装としてこれまでにいくつかのロボットを実装してきているが,本稿ではその中の一つで,自律的に室内を移動し,人とコミュニケーションを取れる自律移動型対話ロボットIndy[3]について紹介する.我々は,こころを感じられる要素の一つとして,ロボットが自身の意図や記憶を持って主体的に行動していることが重要だと考えている.Indyでは,主体的な行動の実現を目指したシステムを実装している.
2. ロボットのハードウェア構成

Indyを図 1に示す.このロボットは,Keigan社製のKeigan Aliをベースに,子ども程度の背の高さ110cm程度のヒューマノイドの胴体を持つ.首,胴体,各腕がそれぞれ2,1,4自由度で可動し,様々なジェスチャや動作を表出する機能をもっている.また,両目にはディスプレイが埋め込まれており,表示を切り替えることにより,表情を変えることができる.センサとして,Keigan Aliがもつセンサに加え,ロボット本体には頭部にRGB-Dセンサ(Intel Realsense D455),両肩に1ラインのLiDAR(YDLIDAR T-mini Pro)を1基ずつ,胸部に16 chのマイクロホンアレイ(System in Frontier RASP-ZX)を搭載している.RGB-Dセンサは周囲の様々な物体や状況の認識に利用され,LiDARとマイクロホンアレイは周囲の話者を認識して音源分離・音声認識に利用される.
3. 主体的な行動決定のためのシステム構成
3.1 基本的な処理の流れ
我々はIndyにおいて,ロボット自身の意図に基づいて記憶を参照しながら一貫した行動決定ができる仕組みの実現を目指している.そこで,図 2に示すような階層的なモデルを実装した.このシステムでは,センサを用いて外界の情報を入力し,自己位置推定モジュールや周囲環境認識モジュールによって,外界の情報を収集する.そして,それらを内部表現として記述,保存する.次に,意図モジュールが,内部表現と,自身の記憶(データベース)に基づいて,意図を決定し,発話内容生成モジュールや行動計画モジュールによって,どこへ行くべきか,何をどう話すべきかを生成して内部表現の形で記述する.最後に,移動制御モジュールや発話制御モジュールが,内部表現で記述された情報を受取り,ロボットに合った方法で移動や発話を実際に生成してロボットを動かす.一方で,障害物回避などの動作は,意図や記憶を参照したりする必要がないため,周囲環境認識モジュールが出力する情報を直接利用してロボットが移動する.
外界との相互作用(認識・行動)はセンサやロボットの身体性によって異なるが,このような内部表現を介した2層構造にすることにより,行動決定をするモジュールは,ロボットの身体性に依存せずに処理することができ,様々なロボットに共通で利用できるようになっている.

3.2 状況に応じた行動決定
Indyは,普段は見回り(巡回監視)を基本動作として実行するが,その時その状況で必要な動作を決定して行動することが求められる.我々は,家庭内の見回りをメインシナリオ,各状況での特別な動作をサブシナリオと捉え,図 3に示すような,必要に応じてシナリオを切り替える状態遷移モデルを設計した.
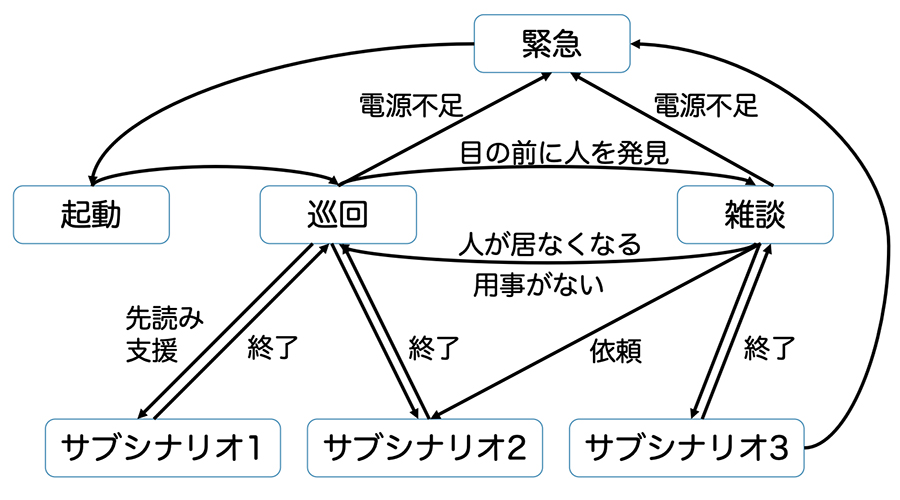
メインシナリオとして基本的にロボットは部屋を見回りしているが,ロボットと人が接近した場合は,雑談モードに入る.そこで何かしらの依頼を受けると,サブシナリオに切り替えて動作する.一方,周囲の状況に応じて適宜先読み支援を行い,人が必要としそうな支援(サブシナリオ)を頼まれることなく先回りして実行できるようになっている.また,常時電源状態をチェックしており,電源不足になるとシナリオを中断してステーションへ戻るような設計になっている.
各サブシナリオを自由に設計し,追加・削除に柔軟に対応するため,割り込みによる受動的な状態遷移と,現在状態の処理に基づく能動的な状態遷移の機構を備えている.能動的な状態遷移は,現在のシナリオ終了後に指定した任意のシナリオへと遷移できるよう,また割り込みによる受動的な状態遷移については,指定した任意のシナリオから割り込みができるようになっているのが望ましい.そのため,状態遷移先をコード中にあらかじめ記述せず,各状態に対し,どのシナリオから割り込みを許容するか,終了後にどのシナリオに遷移するかを別途設定ファイルに列挙するよう実装した.Indyは起動時にこの設定ファイルを読み込み,動的に状態遷移図を生成して動作する.
各状態では,1) 割り込み確認,2) 現在状態での処理,3) 能動的な状態遷移の3ステップで動作する.まず,割り込み確認では,現在の状態に対して割り込みを許可されている各状態が割り込むかどうか判断し,割り込めるシナリオが現在のシナリオよりも優先度が高い場合,最も優先度の高いシナリオへと遷移する.その後,現在のシナリオでの処理を1ステップ進めたあと,終了するかを判断し,終了する場合は遷移先シナリオへと状態遷移する.以上の処理により,設定ファイルを用いて柔軟に動作する仕組みを実現している.
次回に続く-
参考文献
- 湯口 彰重, 河野 誠也, 石井 カルロス寿憲, 吉野 幸一郎, 川西 康友, 中村 泰, 港 隆史, 斉藤 康己, 美濃 導彦
ぶつくさ君:自身の外界認識と内部状態を言語化するロボット
日本ロボット学会誌,40巻10号pp.932-935, 2022年 - Wataru Sato, Shushi Namba, Dongsheng Yang, Shin’ya Nishida, Carlos T. Ishi, and Takashi Minato, An android for emotional interaction: Spatiotemporal validation of its facial expressions, Frontiers in Psychology, Vol.12, 2022.
- Huthaifa Ahmad, Angel GarciaContreras, 河野 誠也, Chaoran Liu, 湯口 彰重, 薗頭 元春, 川西 康友, 石井 カルロス寿憲, 港 隆史, 中村 泰, 吉野 幸一郎, Heikki Ruuska, 斉藤 康己, 美濃 導彦
“生活空間を周回し自発的にユーザ補助を行う自律型対話ロボット”
第41回日本ロボット学会学術講演会予稿集, 2023年
【著者紹介】
川西 康友(かわにし やすとも)
国立研究開発法人理化学研究所
情報統合本部 ガーディアンロボットプロジェクト
感覚データ認識研究チーム チームリーダー
■著者略歴
- 2006年京都大学工学部情報学科 卒業
- 2008年京都大学大学院情報学研究科 修士課程修了
- 2012年京都大学大学院情報学研究科 博士課程修了(京都大学博士(情報学))
- 2012年京都大学学術情報メディアセンター 特定研究員
- 2014年名古屋大学未来社会創造機構特任 助教
- 2015年名古屋大学大学院情報科学研究科 助教
- 2017年名古屋大学大学院情報学研究科 助教
- 2020年名古屋大学大学院情報学研究科 講師
- 2021年国立研究開発法人理化学研究所 チームリーダー
- 2021年名古屋大学 客員准教授
- 2022年奈良先端科学技術大学院大学 客員教授
現在に至る.
ロボットによる周囲環境認識及び,人物追跡・属性認識・行動認識などの人物画像処理に関する研究に従事.特に,認識器の学習データに含まれていない,認識器にとっての未知物体の認識に関する研究に注力している.
次世代ロボットの高度化と革新サービスを提供する「ロボットフォトニクス」(1)

関西センター産学官連携推進室
連携主査
村井 健介
1.はじめに
近年、我が国をはじめ世界中でロボットに対するニーズが高まっている。製造現場における産業ロボットから、生活現場で活躍する次世代ロボットへと応用範囲が拡がっている。物流現場では省人化に向けた「搬送ロボット」が導入され、搬送現場では空中輸送に長けた「ドローン」が普及し、製造現場でも作業者と並んで作業する「協働ロボット」の導入が進んでいる。また、自動運転技術でもロボット技術が利用されて安全性や利便性の向上に貢献している。
経済産業省のロボット政策研究会1)では、ロボットを「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」として広く定義している。性能向上が著しいコンピュータ技術によって知能・制御系が進化し、ロボットは劇的に高機能化・高性能化している。2015(平成27)年に策定された「ロボット新戦略」2)でも、ものづくり・サービス、介護・医療、農業、インフラ・災害対応・建設といった分野に積極的に取組み、規制改革や基盤整備にも力を入れるとしている。2021(令和3)年に閣議決定された第6期科学技術・イノベーション基本計画3)では、我が国が目指すべき未来社会像を「Society 5.0」4)として「持続可能性と強靭性を備え、国民の安全と安心を確保するとともに、一人ひとりが多様な幸せ(well-being)を実現できる社会」と表現している。これらに関連して、ロボットのロードマップや実装モデルが多数報告され5-8)、「戦略的イノベーション創造プログラム(SIP)」9)および「ムーンショット型研究開発事業」10)などでもロボット技術に関する研究開発プロジェクトが実施されている。
社会課題解決のためのツールとしてのロボット技術への期待も高まっている。人間の代替(労働力不足)としてだけでなく、特に人間の苦手な作業(超人的、単純)な作業(サービス)を担う存在として、ロボットが期待されている。高所作業や潜水作業など危険作業からの解放もニーズとして重要である。ドローンによる空中配送や長時間の潜水作業は人には代え難く、飛躍的なサービス向上につながる革新的な方法を可能にする。生活空間の清掃作業や物流拠点の仕分け作業などは、ロボット導入によるスピードアップとコスト低減が進めば、働き方改革にも合致する。ロボットが人間の仕事を奪うのではなく、単純作業の繰り返しや空を飛ぶ・水に潜るなどの人間が苦手な作業をロボットが担うことで、イノベーションを起こす可能性が高い。
2.ロボットフォトニクスについて
ロボット技術が活用される自動運転技術において環境認識のためのLiDARやカメラ映像の画像処理がリモートセンシングに役立っている。光波やミリ波など電磁波を使ったリモートセンシングは、ロボット技術に不可欠となっている。また、可視光波長域だけでなく、紫外線や赤外線など人間には見えない光を映像化したり、ハイパースペクトルカメラと呼ばれる三原色(RGB)より細かく色分けした映像に分割できるイメージングデバイスも開発され、すでにロボットに搭載されている。つまり、現代のロボット技術は、光技術(フォトニクス)なしに成り立たない。
平成29(2017)年度地域中核企業創出・支援事業(経済産業省)がきっかけとなり始まったロボットフォトニクス産業への取組みは、ロボット技術(ロボティクス)と光技術(フォトニクス)の融合による新しい技術分野の開拓を目指しており、現在は一般社団法人レーザー学会の技術専門委員会(以後、ロボットフォトニクス専門委員会)に引き継がれている。11)
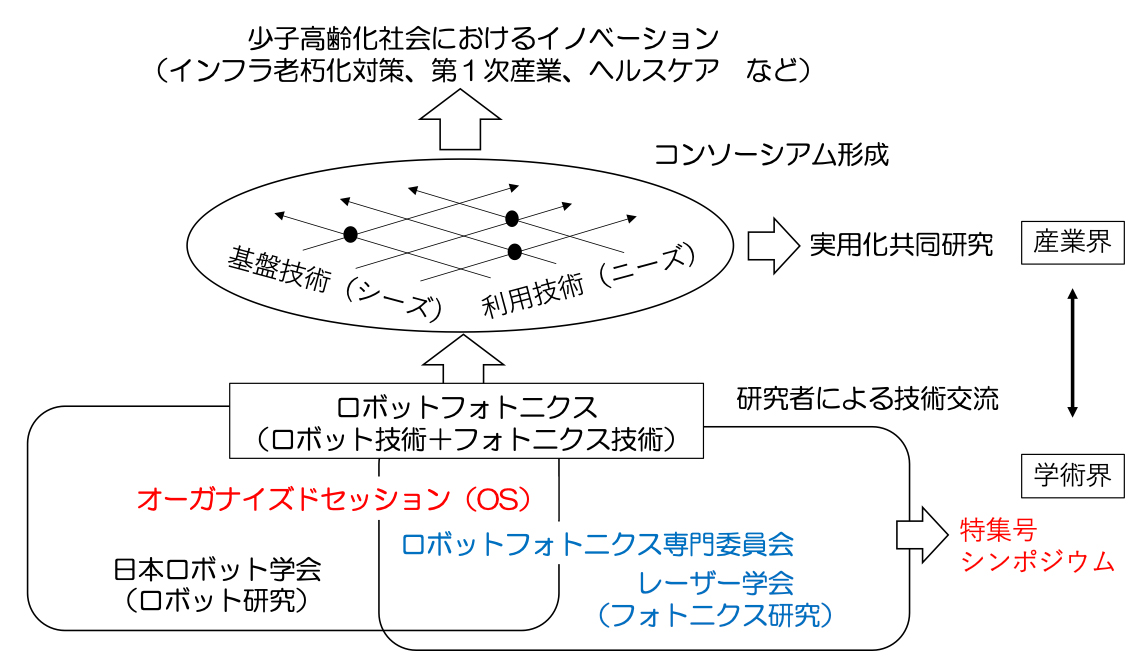
ロボットフォトニクス専門委員会は、ロボット技術と光技術の融合を通じて、学術界における研究交流にとどまらず、産業界におけるコンソーシアム形成を通じた共同研究開発を通じた社会実装を志向している(図1参照)。主な対象分野として、インフラの老朽化対策、第1次産業、ヘルスケアを想定してスタートしている。これらの分野に限らず、少子高齢化や過疎地において進んでいく労働力不足や、あるいは災害時において活躍できるロボット技術の向上が期待される。LiDARによるセンシングやカメラ画像のAI処理によって自動運転が実現していくことや、レーザー加工などによって困難な加工を実現することが、ロボットフォトニクスというアプローチであり、フォトニクスによってロボットを高度化したり、革新的なロボットサービスを開拓するだけでなく、社会課題解決を志向するロボットフォトニクスに向けた人材育成も重要である。
2.1 フォトニクスによる革新的なロボットサービスについて
持続可能な社会に向けてSDGs(Sustainable Development Goals)が提唱されているが、地球温暖化など環境問題、食糧問題、紛争など、多くの解決すべき社会課題がある。世界の人口は増え続けているが、世界では多くの子どもたちが、「極度に貧しい」暮らしをしているとされている。また、自然災害や紛争など不確定な状況下における食糧の確保は不安定さを増している。地球上には食糧が偏在し、その量も十分ではない。食糧問題は、非常に重要な社会課題である。(SDGs2:飢餓をゼロに)
日本は食糧の大部分を輸入に頼ってきたために、食糧自給率が低くなっている。しかし、海に囲まれた島国のために国土面積の10倍以上もある世界第6位の排他的経済水域(EEZ: Exclusive Economic Zone)を有している。海洋開発としては、洋上風力発電などエネルギー開発が進められているものの、少子高齢化によって減少する漁業従事者や潜水士に代わる水中作業を担うロボットの開発は遅れている。水中ロボットがあれば労働力が補強され、漁業が盛んになり食料自給率の向上にもつながるのではないだろうか。しかし、水中では電波による無線技術は役に立たないし、水深と共に増大する水圧にも耐える必要があることから、水中ロボットの研究開発が急がれる。
一方、地球温暖化対策のソリューションとしての「ブルーカーボン(blue carbon)」12)が、2009年に公表された国連環境計画(UNEP)の報告書において定義され、吸収源対策の新しい選択肢として世界的に注目が集まるようになっている。ブルーカーボンとは、沿岸・海洋生態系に取り込まれ、そのバイオマスやその下の土壌に蓄積される炭素のことである。ブルーカーボンの主要な吸収源である「ブルーカーボン生態系」としては、藻場(海草・海藻)や干潟等の塩性湿地、マングローブ林があげられている。日本でも、環境省がブルーカーボンに関する取組みを発信している。
ところで、太陽光は海面付近で吸収されて、数10mの海底までは届かない。そのため、海底では光合成が行われず、植物プランクトンや海藻の成長が進まない。植物プランクトンや海藻がなければ、貝類などが成長するための栄養源がないので、その貝類を食べる蛸や魚類も育たない。すでに、陸上では、LEDを使った植物工場は実用化されて空きスペースへの導入が進んでいる。海底には水と二酸化炭素が存在するので、洋上で発電した再生可能エネルギーを海底に送電し、海底付近で光合成用LEDを点灯させることで、太陽光の届かない海底でも海藻などを育成することができるのではないか。言わば、「海底植物工場」によって貝類や魚類が育ち豊かな漁場が育まれてSDGsにも貢献できる期待がある。(SDGs14:海の豊かさを守ろう)
なお、貝殻の主成分は炭酸カルシウム(CaCO3)なので、貝類の育成は二酸化炭素(CO2)の固定に貢献するので、海底植物工場で育てた貝類も「ブルーカーボン生態系」に相当する。(SDGs13:気候変動に具体的な対策を)海の豊かさとブルーカーボンを両立させるためには、貝類の貝殻と身を分離して貝殻を海底に残すことが重要であり、水中ロボットにレーザー加工装置を搭載するなどロボットフォトニクスのアプローチが必要になるだろう。
次回に続く-
参考文献
- 「ロボット政策研究会報告書 〜RT革命が日本を飛躍させる」, (2006年5月, ロボット制作研究会)
https://www.jara.jp/various/report/img/robot-houkokusho-set.pdf - 「ロボット新戦略(Japan’s Robot Strategy) ―ビジョン・戦略・アクションプラン―」,(2015年2月, 日本経済再生本部)
https://www.kantei.go.jp/jp/singi/keizaisaisei/pdf/robot_honbun_150210.pdf - 「第6期科学技術・イノベーション基本計画」(2021年3月, 内閣府) https://www8.cao.go.jp/cstp/kihonkeikaku/index6.html
- 「Society5.0」, (2021年, 内閣府) https://www8.cao.go.jp/cstp/society5_0/
- 「AI・ロボット・人の共進化による産業力向上の実現」(2016年3月, 産業競争力懇談会(COCN))
http://www.cocn.jp/report/thema86-L.pdf - 「ロボット実装モデル構築推進タスクフォース活動成果報告書」, (2020年3月, 経済産業省(METI), 国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO))
https://www.meti.go.jp/meti_lib/report/2019FY/000348.pdf - 2022年度版実装技術ロードマップ ~Society 5.0「国民の安全と安心」「Well-being」実現に向けた実装技術の将来動向~, (2022年7月, 一般社団法人電子情報技術産業協会(JEITA))
https://www.jeita.or.jp/japanese/pickup/category/2022/vol42-03.html - 「ロボット産業ビジョン2050 −人・社会・環境と共存するロボット−」, (2023年5月, 一般社団法人日本ロボット工業会(JRA))
https://www.jara.jp/publications/img/vision/visionver0_booklet.pdf - 戦略的イノベーション創造プログラム(SIP)「人協調型ロボティクスの拡大に向けた 基盤技術・ルールの整備 社会実装に向けた戦略及び研究開発計画」(2023年6月, 内閣府 科学技術・イノベーション推進事務局(CSTI))
https://www8.cao.go.jp/cstp/gaiyo/sip/sip_3/keikaku/11_robotics_1.pdf - ムーンショット目標3「2050年までに, AIとロボットの共進化により, 自ら学習・行動し人と共生するロボットを実現(PD:福田敏男)」, (2020年度〜, 科学技術振興機構(JST))
https://www.jst.go.jp/moonshot/program/goal3/index.html - 一般社団法人レーザー学会ロボットフォトニクス専門委員会, 「光が結ぶロボットと人間の協働社会」, OPTRONICS(オプトロニクス社、2019年7月号), pp.141-144.
https://ndlsearch.ndl.go.jp/books/R000000004-I029874453 - “Blue carbon : the role of healthy oceans in binding carbon”, (2009, Environmental Programme, United Nations)
https://wedocs.unep.org/handle/20.500.11822/7772;jsessionid=AEDAA40CB8360D1FB14085945E54C9A8
【著者紹介】
村井 健介(むらい けんすけ)
国立研究開発法人産業技術総合研究所 関西センター産学官連携推進室 連携主査
一般社団法人レーザー学会「ロボットフォトニクス」技術専門委員会 主査
■略歴
1987年大阪大学工学部精密工学科卒業。大阪大学大学院工学研究科精密工学専攻(前期)、電気工学専攻(後期)。大学ではプラズモンについて、大学院では大阪大学レーザー核融合研究センター(現在の大阪大学レーザー科学研究所)でエキシマレーザーやX線レーザーについて研究。レーザープラズマを利用した軟X線レーザーに関する研究で博士号を取得。
1995年工業技術院大阪工業技術研究所(現在の産業技術総合研究所関西センター)入所。入所後は、プラズモニクスやレーザープラズマなど、光と物質の相互作用の応用研究。内閣府総合科学技術会議や近畿経済産業局への出向時にロボット政策に関与。近年は産学官連携推進活動に従事。
博士(工学)。技術士(応用理学)。日本ロボット学会(RSJ)正会員。レーザー学会(LSJ)正会員、「ロボットフォトニクス」技術専門委員会主査。
サウンドスケープ観測システムの開発 Development of Sound Scape Observation System(1)

笹倉 豊喜
1. はじめに
水中の音風景(サウンドスケープ)、それは音を聞くことによって水中の景色を想像してみる、夢のような話である。人間は水中に入れば無言で潜水を続けるしかないわけであるが、水中の生物たちは結構頻繁に音を発して、互いのコミュニケーションを行なっている。イルカたちはホイッスルというピューピューといった人間にも聞こえる音を発して、互いの存在確認や意思疎通を行なっている。魚たちの中にも音を発するものは意外に数が多く、自分の縄張りへの闖入者への威嚇であったり、時によっては異性への求愛の音を発生したりする。
本論文では、海底に設置したサウンドスケープ録音機で水中の音を聞いてそれが何であるかをAI1)を用いて識別し、その結果を水中通信で海面のブイまで伝送し、さらにLPWAを用いて陸上に通信するシステムについて開発を行ったので述べる。
2. システムの概要と構成
システムの概念図を図1に示す。海中音をリアルタイムで分類し、その結果を水中通信で通信ブイに伝送し、さらに空中通信で陸上局に送信しクラウドサーバーに蓄積する。このシステムは石西礁湖の海域に複数台設置され、多点観測によって音源の分布(サウンドスケープ)を可視化し、海域の利用者(漁業者やレジャー関係者)に配信する。
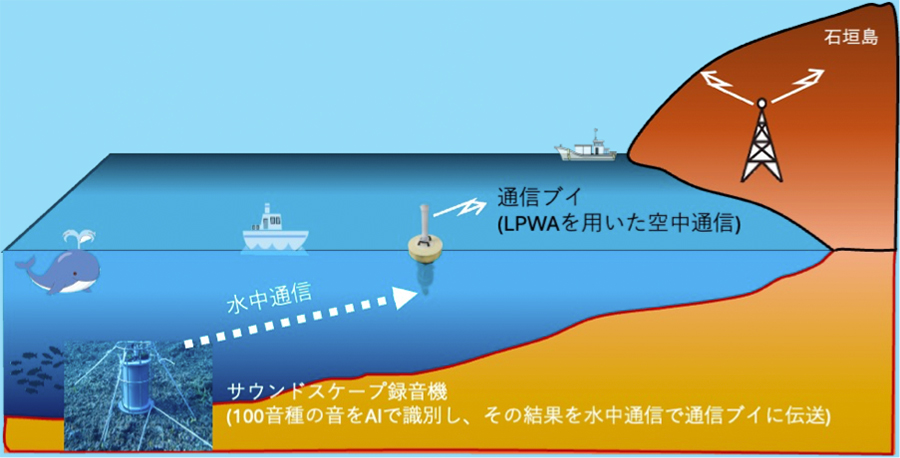
ハードウェアの構成は、海底に設置する2台のサウンドスケープ録音機(以下SS録音機と略す)と海上に係留する1台の通信ブイからなる。
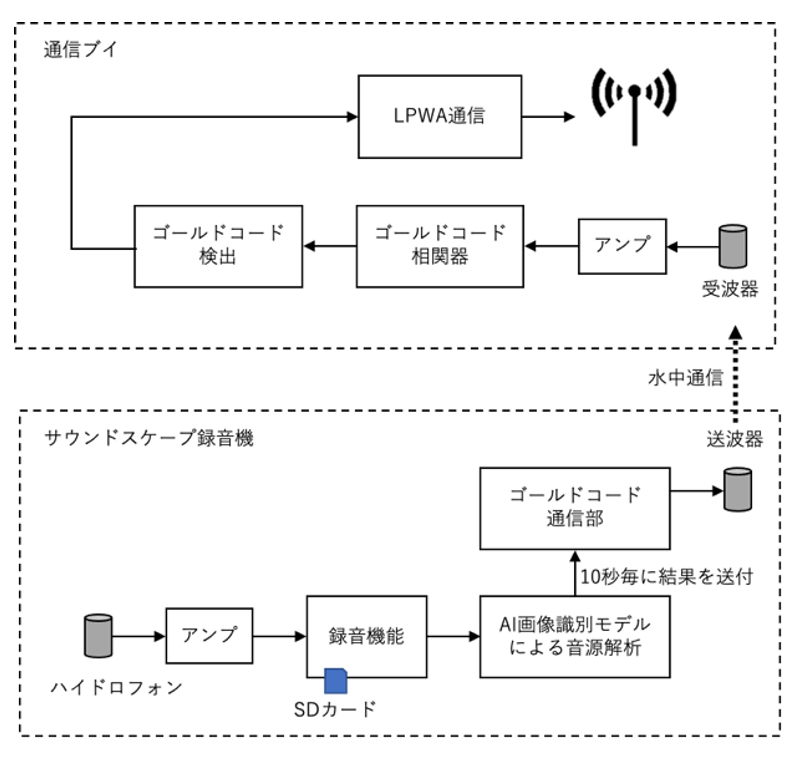
SS録音機では、水中の音をSDカードに記録すると同時に10秒ごとに音源解析を行い、その結果を水中通信で海上の通信ブイに伝送する。水中通信はゴールドコード2)と呼ばれるM系列信号の1種である信号を用いて、雑音に強くまた混信にも強い水中通信を実現している。水中通信の伝達距離は1km以上を実現しており、その伝送成功率は80%以上であることが実海域実験で証明された。水中通信で伝送されたゴールドコードは、海上に係留した通信ブイ内部でゴールドコード相関器により検出され、検出された結果を今度はLPWAという空中通信の電波に乗せてクラウドサーバーまで転送している。図2にSS録音機4台と通信ブイ2台、2式の写真を示す。

図3にシステムの構成を示す。ハイドロフォンで受信した水中音をSDカードに記録し、その音を10秒毎に切り出して音源解析を行う。音源解析は独自に開発した「AI画像識別モデル」というアルゴリズムを用い、10秒毎に音種識別の結果をゴールドコード通信部に送り水中通信で通信ブイに伝送する。通信ブイでは受信した信号をゴールドコード相関器を通して抽出し、その結果をLPWA通信部に送り空中通信でクラウドサーバーに10秒毎にアップロードする。
3. 音源分類アルゴリズム
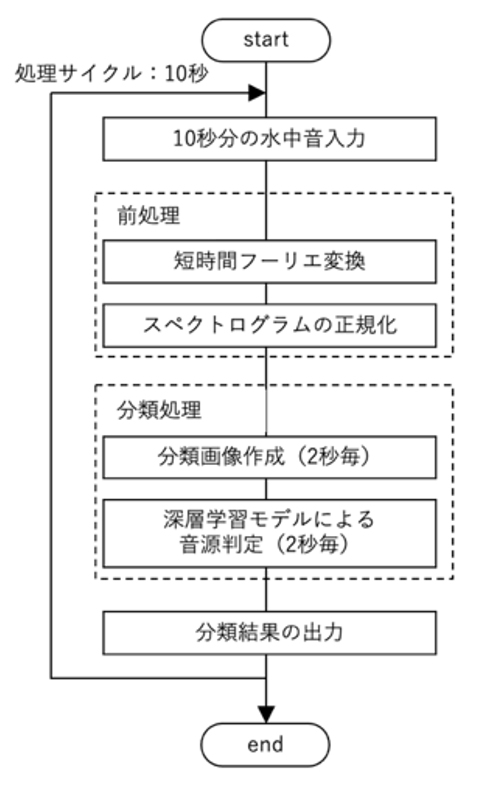
図4は音源分類アルゴリズムのフローチャートである。ハイドロホンで受信した水中音を10秒毎にフーリエ変換し、周波数毎に10秒の中央値を除去したスペクトログラム画像を作成する。その画像をあらかじめ教師データを学習させておいた分類処理ルーティンに入力し深層学習モデル3)により分類結果を得る。この音源識別モデルを「AI画像識別モデル」と名付けた。
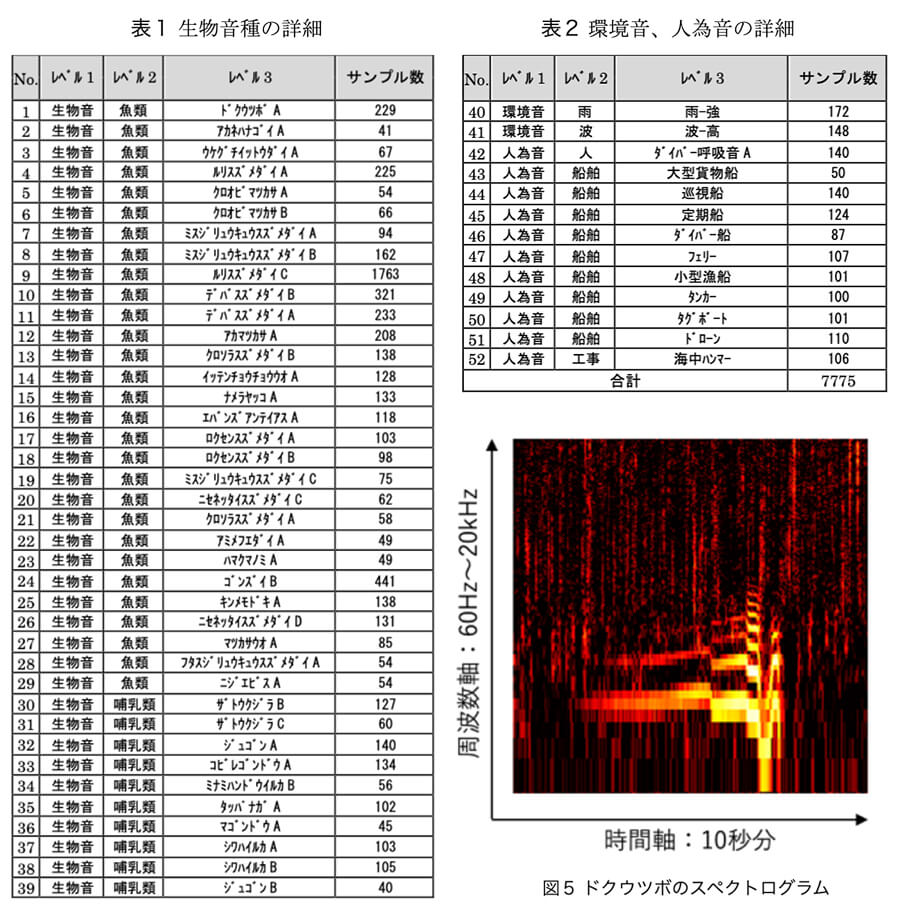
図5はドクウツボのスペクトログラム画像であるが、横軸は2秒分の時間軸、縦軸は60Hz〜20kHzの周波数軸である。このような画像を、最低40サンプル以上収集された音種から、52音種、計7775サンプル準備し、それを教師データとしている。52音種の内訳は表1及び表2に示すように生物音39音種、環境音2音種、人為音11音種である。
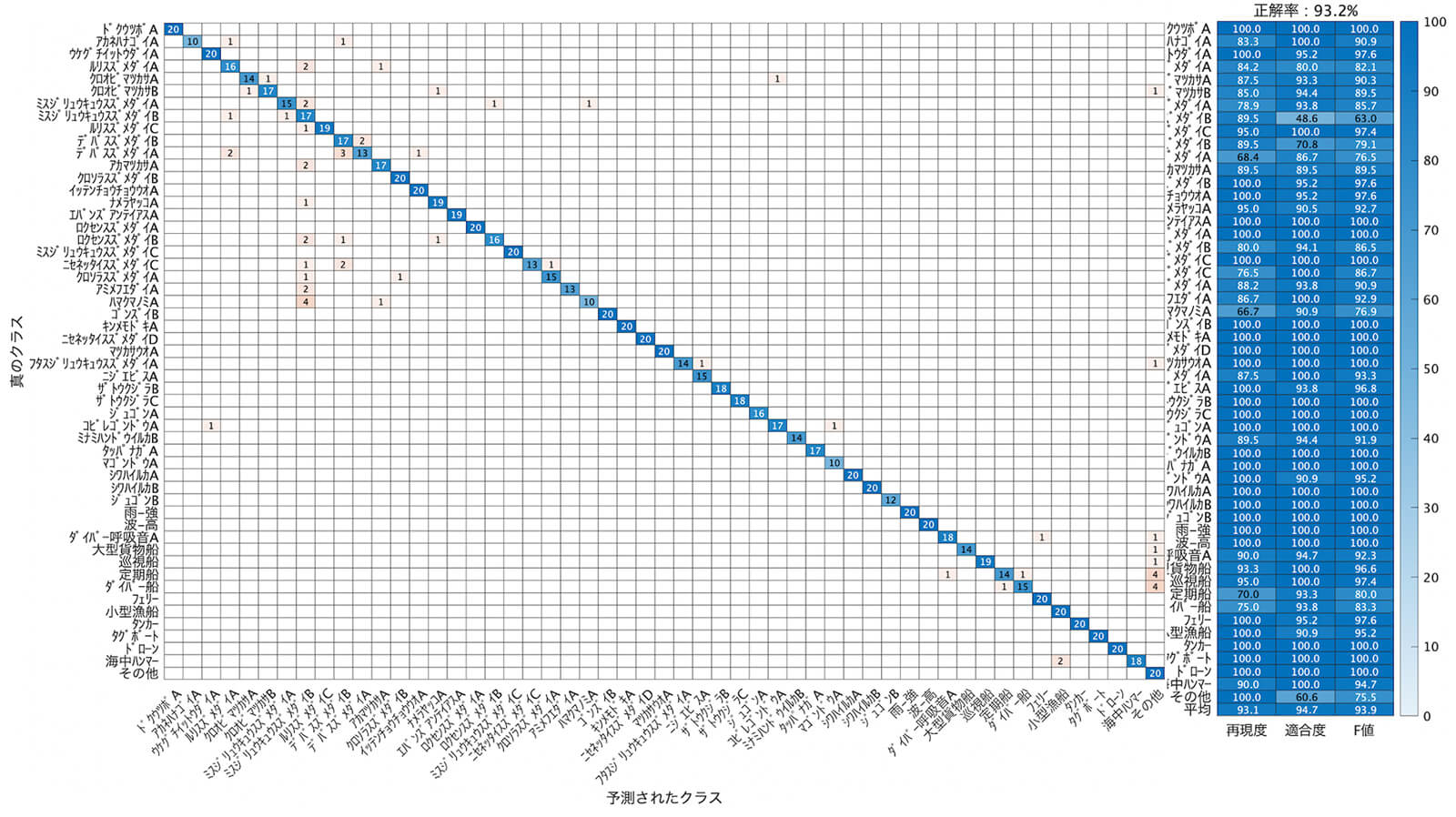
PC上での52音種を用いた場合のアルゴリズムの検証の結果を図6に示した。52音種の音源分類の正解率は、93.2%(再現度: 93.1%, 適合度: 94.7%, F値: 93.9%)となった。図6に示した混合行列において、各行が真のクラスを、各列が予測されたクラスを、各要素中に記載されている数字がそのクラスに分類された音種の数を表している。図中右は音源分類の正解率・再現度・適合度・F値について、それぞれのクラスごとに示している。最下段は各値の平均値を示す。
次回に続く-
参考文献
- B.Benson,etal:Design of a low-cost, underwater acoustic modem for short-range sensor networks, OCEANS’10 IEEE SYDNEY.
- Robert Gold, Optimal binary sequences for spread spectrum multiplexing, IEEE Transaction on Information Theory, October 1967, pp.619-621.
- Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., Erhan, D., Vanhoucke, V. & Rabinovich, A. (2015), Going deeper with convolutions. In Proceedings of the IEEE conference on computer vision and pattern recognition,1-9.
【著者紹介】
笹倉 豊喜(ささくら とよき)
Toyoki Sasakura, Ph.D.
株式会社アクアサウンド 名誉会長
■略歴
- 1973年古野電気株式会社入社
同社在任中、主にソナー・魚探など超音波機器の開発に従事 - 1984年戦艦大和探索に参加、東シナ海で発見
舶用機器事業部開発部長を歴任 - 1990年東京水産大学(現東京海洋大学)より水産学博士号授与
- 1997年古野電気退社
- 2010年東京海洋大学 客員研究員
- 2012年株式会社アクアサウンド設立 代表取締役会長に就任(現在は非役員)
- 2017年株式会社AquaFusion設立 代表取締役
現在に至る.
古野電気入社以来、一貫して魚群探知機、ソナーなどの水中超音波機器の研究開発に従事。2010年には東京海洋大学と共同開発で日本発小型ピンガー(超音波発信機で魚の体内に埋め込んで魚の行動を研究するデバイス)の開発に成功、現在多くの研究者が使用している。
水中・水上ドローンの普及促進を目的としたデモイベントの開催(1)

事業推進部
橋本 健
1.はじめに
新たな機器・技術を導入するにあたっては、実際に自分の目で見て、手で触れて、説明を聞き、多くの候補から比較した上で検討することが望ましい。当社はそのような機会を展示会や見本市、セミナーなどのリアルなイベントで提供し、産業振興を支援している。2024年4月に開催した「Sea Japan」はわが国唯一の国際海事展として1994年から隔年で主催しており、今年30周年を迎えた。今回は海洋・港湾業界も対象とした「Offshore & Port Tech」も初開催し、海事・海洋・港湾の技術交流を推進した1)。
この度「Offshore & Port Tech」の初開催を記念したプレイベントとして、水中・水上ドローンのデモンストレーションイベントを昨年11月に実施したが、予想以上に大きな反響をいただいたのでここでご紹介したい。
2.背景
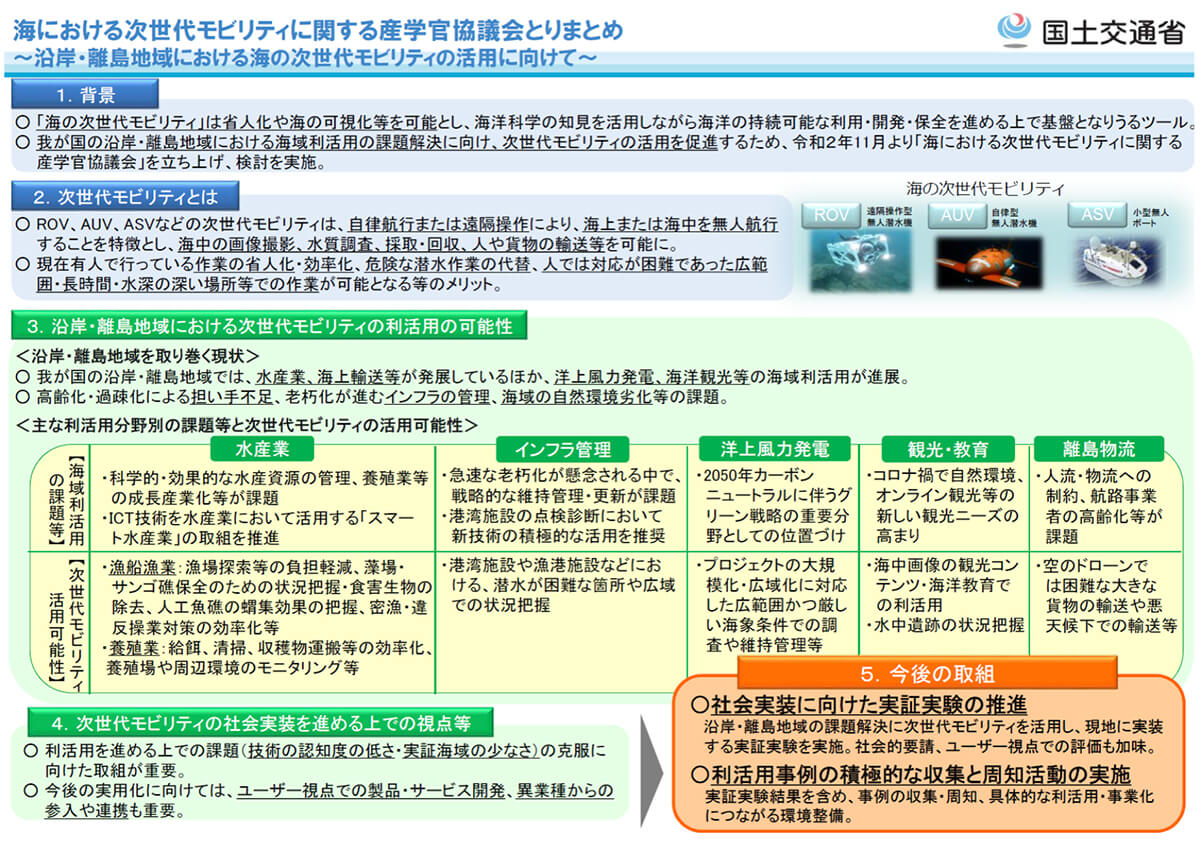
近年、水中ドローンや水上ドローンをはじめとする「海の次世代モビリティ」への注目が高まっている。国土交通省は沿岸・離島地域における海域利活用の課題解決から海洋産業の活性化にもつなげることを目指し、2020年11月から「海における次世代モビリティに関する産学官協議会」(図-1)を開催するなど、取り組みを加速させている。
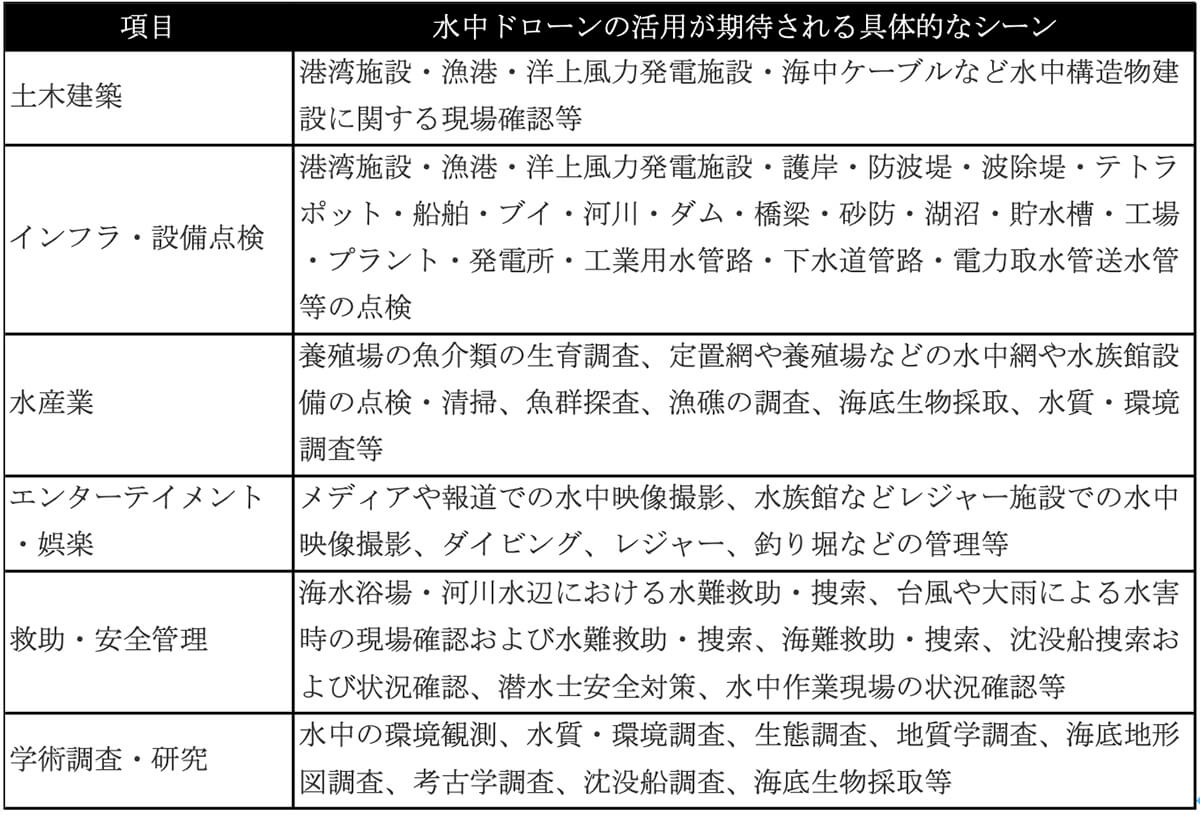
また、一般社団法人水中ドローン協会が2019年4月に、日本水上ドローン協会が2023年9月に設立されるなど国内の普及促進に向けた動きも活発化しており、様々な分野での利用拡大が期待されている(図-2)。海事業界においても検査や点検、調査などへの活用を始めるところや、検討している企業が増加していることから、2022年に開催した「Sea Japan 2022」においても関連の展示ブースは非常に賑わっていた。
一方で新たに活用を検討するユーザーからは、「何ができるかを知るには現場に近い環境での動作を見る必要があるが、そのような機会が少ないため、導入に踏み切れない、または検討に時間がかかる」という声があがっていた。国内で行われている様々な業界別の産業展示会においても水中ドローンなどの出展は増えており、水槽やシミュレーターを使ったデモも行われていたが、現場に近いリアルな環境で、多くの機体を一堂に見て、触れることができる機会はまれだった。そのため、展示会に加えて、新たなデモンストレーションイベントを企画することが、普及促進のスピードアップに貢献するのではないかと考えた。
3.イベント企画
「[検査・点検・調査]Ocean Demonstration」というタイトルで当該の企画を立ち上げ、2023年11月に実施することとした。会場は東京都港湾局とも相談し、東京夢の島マリーナを使用させていただいた。企画は一般社団法人日本水中ドローン協会にもご協力いただき、2023年3月に和歌山県で開催された「第2回わかやまスマート養殖フェア」での水中ドローン実演・体験企画を参考にした2)。イベントの構成としては、最初に会議室で各社がプレゼンテーションを行って各機器の詳細を説明。その後、参加者全員がビジターバースへ移動し、実際にデモンストレーションで機器を動かしながら質問や商談をするという内容とした(図-3)。
![図-3「[検査・点検・調査]Ocean Demonstration」開催概要・プログラム](https://sensait.jp/wp-content/uploads/2024/05/hashimoto_03.jpg)
次回に続く-
参考文献
- 「Sea Japan 2024」プレスリリース,2024.2.27(https://www.seajapan.ne.jp/6681/)
- 「一般社団法人日本水中ドローン協会」イベントレポート,2023.3.9(https://japan-underwaterdrone.com/works/wakayamasmart_report/)
【著者紹介】
橋本 健(はしもと けん)
インフォーマ マーケッツ ジャパン株式会社 事業推進部
■略歴
産業展示会の主催をはじめ、BtoBイベントの企画関連業務に従事しており、現在は「Sea Japan / Offshore & Port Tech」(https://www.seajapan.ne.jp/)と「バリシップ」(https://www.bariship.com/)を担当
千葉県出身。早稲田大学卒。2000年より新聞社に勤務し、センサや計測、測定、検査の専門展をはじめ、ものづくりを支える業界を対象に数多くの産業展示会の主催者業務に従事。その後、企業や団体の販促・PR支援業務、ITソフトウェア企業での企画業務を経て、2022年より現職。2015年に中小企業診断士登録。
モニタリングシステム測定器「ルミテスター Smart」特許庁長官賞/発明実施功績賞を受賞

オプテックス(株)とキッコーマンバイオケミファ(株)が共同開発した衛生状態モニタリングシステムの測定器「ルミテスター Smart」の意匠が、公益社団法人発明協会が主催する令和6年度全国発明表彰において、「特許庁長官賞」及び実施者を表彰する「発明実施功績賞」を受賞した。
◇受賞発明
特許庁長官賞/発明実施功績賞(※1)
迅速簡易に衛生検査できるルミノメーター
意匠登録第1628256 号
・「ルミテスター Smart」は、飲食店の厨房や食品工場、医療現場などにおいて人の目では確認できない汚れを測定し数値化する「ATP検査」(※2)による衛生状態モニタリングシステムの測定器(画像:使用イメージ)。
・本製品の意匠では、滑らかで凹凸の無いシンプルなデザインに、静電容量式タッチスイッチを採用。使用者が清潔に保ちやすく、直観的な操作で測定できる。また持ち手で蓋の開閉や背面スタンドの押し出しを行えるよう設計している。
・測定結果はクラウドと連携し、離れた場所からでも確認可能。特別に訓練を受けた専門家だけでなく、誰もが簡便に衛生管理できるデザイン(※3)を追求した。
※1.受賞対象の発明等を実施した功績に対し、権利を保有する企業や団体の代表者に贈られる賞で、本件においてはオプテックス(株)およびキッコーマン(株)が受賞している。
※2.「ATP検査」とは、生き物を含む多くの有機物に含まれるATP(アデノシン三リン酸)を汚れの指標とした検査方法である。
※3.本意匠は、hyphenate(株)との共同デザイン
プレスリリースサイト(optex):https://www.optex.co.jp/news/2024/0604.html
空間伝送型ワイヤレス給電ソリューション「AirPlug™」GROWTH文京飯田橋に導入決定
米・スタンフォード大学発のスタートアップ企業、エイターリンク(株)は、空間伝送型ワイヤレス給電ソリューション「AirPlug™*」を住友不動産(株)のスタートアップ支援の一環として、スタートアップも入居しやすいよう敷金を抑え、家具やネット環境を予め完備したインキュベーションオフィスGROWTH文京飯田橋に導入する。
* AirPlug™は、エイターリンク(株)の登録商標。
◇空間伝送型ワイヤレス給電導入が解決するビル課題とは
ビル不動産業界では、発達目覚ましいIoT機器などのICT技術をビル竣工後の運用中に中途導入することは、設備のレノベーション機会でない限り、配線の敷設や既存設備の設定変更に関連した莫大なコストが発生する為、簡単には導入できないといった、ビルオーナーにとって頭の痛い課題があった。
エイターリンクの空間伝送型ワイヤレス給電AirPlug™は、センサ等のIoT機器によるセンシングの完全なワイヤレス化を実現する。これにより、配線不要でセンサ・IoT機器類の敷設・交換がソフトウェア上の登録のみで簡単に完了する為、ビルの持続的なICTインフラ環境のアップデートを可能にする。AirPlug™の空調の最適化ソリューションにより、ビル居住空間内の最適化を実現し、利用者様の利便性・快適性のさらなる向上を目指すとともに、空調運転のランニングコストを低減、排出されるCO2削減を推進していくとのこと。
◇空間伝送型ワイヤレス給電ソリューション「AirPlug™」概要
AirPlug™は「電波を用いて人の居住環境にワイヤレス給電空間を創る」空間伝送型ワイヤレス給電ソリューション。最大17m以上の給電距離に加え、移動体に対しても給電可能な低い角度依存性を持つ独自の送受電技術を備えており、空間内にデジタルツイン環境を構築することが可能となる。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000036.000071264.html
ugoと日立グループ、自律走行する業務DXロボットを使った工場点検の自動化サービス

ugo(株)、(株)日立プラントサービス、(株)日立システムズは施設運用全体の適正化への貢献を目的に3社で協創し、業務DXロボットを使った工場点検作業の自動化サービスの開発をスタートした。
本サービスは、業務DXロボットが工場内を巡回して設備を点検するとともに、点検で収集したデータの分析を通して設備運用の効率化を目的とするもの。具体的には、ugoの自律走行と遠隔操作のハイブリッド型業務DXロボット「ugo*1(ユーゴー)」が工場内を巡回し、「ugo」に搭載された各種センサと日立システムズのCYDEEN*2メーター自動読み取りサービスにより、工場内の温度・湿度などの環境データや計器メーターの値を自動で取得する。取得したデータに日立プラントサービスが60年にわたって現場で培った大規模工場の保守ノウハウを融合させる。これにより、熟練技術者の技術の継承、エネルギー効率の改善や故障の予兆検知などの設備運用の効率化に貢献する。2024年秋より、半導体工場にて実運用を開始し、2024年度中のサービスリリースを予定している。
将来的に、収集したデータで熟練保守員の持つノウハウをAIで再現し、保守計画の立案をはじめとする設備運用のさらなる効率化へ向けサービスを拡充する。現場の情報を可視化し、カーボンニュートラルを含む経営の改善提案で、施設運用全体の適正化へ貢献するトータルシームレスソリューション*3を提供する。
*1 「ugo」の名称、ロゴはugo(株)の登録商標。詳しくは、こちら(https://ugo.plus/products/)。
*2 「CYDEEN」は(株)日立システムズの登録商標。詳しくは、こちら (https://www.hitachi-systems.com/ind/cydeen/)。
*3 「トータルシームレスソリューション」は、(株)日立製作所の日本における登録商標。
プロダクト、OT、ITとデジタル技術を活用し、現場と経営、サプライチェーン、異業種の間で発生する「際(きわ)」の課題を解決するソリューション。
「際(きわ)」は日立製作所の日本における登録商標。
■本サービス開発の背景
大規模な製造工場では、若年入職者の減少による技能労働者の高齢化や団塊世代の熟練技術者が引退過程を迎えることによる技能の維持・継承の問題が顕在化している。また、人口減少に伴う人員不足や物価上昇を背景とした予算などのリソースの制約が強まる中、生産停止リスクの低減や、緊急時の保守対応、エネルギー使用の最適化など、より高度な施設運用が求められている。
これらのニーズに応えるには、現場の負担を軽減する高性能なプロダクト、豊富なナレッジを基に適切な設備運用を行うOT*4、現場の情報を収集・見える化し、設備運用のさらなる効率化を実現するITが不可欠である。ugo、日立プラントサービスと日立システムズはそれぞれの強みを生かし、本サービスの提供を通して、お客さまの設備運用の効率化へ貢献する。
*4 OT:Operation Technology(制御・運用技術)
■本サービスの特長
1. 手厚い運用サポートつきの業務DXロボットで巡回点検作業を自動化
AIとカメラを搭載した「ugo」は、あらかじめ設定した巡回ルートを自律走行し、工場内の設備を点検する。メーターの数値やランプの点灯などに異常を検知した際は自動で通知し、作業員による巡回点検の作業負担を軽減する。かつ、「ugo」の不具合発生時には、日立システムズが持つ全国約300拠点にいる保守員が迅速にサポートする。
2. デジタル・アナログ問わずメーターの数値を自動で読み取り、データを見える化
「ugo」に搭載されているCYDEENメーター自動読み取りサービスは、デジタル・アナログを問わず、メーター数値を読み取ることができる。また、「ugo」本体の拡張性を生かし環境センサを搭載することで、温度、湿度、気圧といった環境情報を収集することもできる。集積されたデータはグラフ化され、管理者は事務所にいながら工場内の機器の状況を把握することができる。
3. データを活用し、設備の運用・メンテナンスを最適化
収集したデータと日立プラントサービスの長年培った工場設備運用のナレッジを掛け合わせることで、お客さまの施設運用を効率化するソリューションを提供する。熟練技術者が持つ技術の継承支援や設備の故障予兆の検知、エネルギー効率改善の提案を通して、お客さまのさらなる業務品質の向上を実現する。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000129.000042324.html
旭化成エレとSAL、自動車用高電圧アプリにおけるeFuseの技術検証成功
旭化成エレクトロニクス(株)と欧州のエレクトロニクスおよびソフトウェアベースのシステムの研究機関であるSilicon Austria Labs GmbH(以下「SAL」)は、炭化ケイ素(SiC)を用いたパワーデバイスを利用した高電圧アプリケーションにおける電子ヒューズ(eFuse)技術の共同技術検証に成功した。
得られた検証結果より,このeFuse 技術は自動車に搭載される充電器 (On Board Charger:OBC)などのシステムの安全性を大幅に向上させ、部品やメンテナンスのコストを削減できる可能性があることが示された。
◆背景
電気自動車をはじめとした高電圧アプリケーションでは、高効率化を進めるため、これまでのシリコン(Si)材料のものから、SiCや窒化ガリウム(GaN)といった次世代の半導体材料を用いたパワーデバイスへの切り替えが進んでいる。
これらの次世代パワーデバイスを使用するシステムでは、過電流が発生したときにデバイスを保護し、コストのかかるメンテナンスを回避するため、これまでよりも高速にシステムをシャットダウンさせる必要がある。これらの理由から、これまで過電流対策として使用されてきた機械式ヒューズよりも、高速応答性で優位なeFuseが求められている。
◆共同技術検証について
旭化成エレクトロニクスはSALと共同で技術検証を行い、このたび、機械式ヒューズを用いた従来の保護システムの課題を解決するeFuseシステムを開発した。同社が本年2月に発表したコアレス電流センサー「CZ39シリーズ」はその応答時間が100nsと非常に短く、また高精度であることが特長だが、本製品をeFuseに用いることで、過電流を即座に検出しシステムの高速なシャットダウンを実現する。
このeFuseソリューションは、OBCなどSiCやGaNベースのパワーデバイスを搭載した次世代の高電圧EVシステムで求められる過電流および短絡保護機能を提供する。さらに、eFuseを電流センシングにも活用することで、システムに流れる電流も効率的に調整することができるため、システム全体の部品点数を削減することが可能であるという。
同社は、本年6月に開催されるPCIM Europe 2024(開催地 : ドイツ・ニュルンベルク)にて、SALとの共同研究の成果について詳細を発表する予定。
プレスリリースサイト:https://www.asahi-kasei.com/jp/news/2024/el240529.html
視覚障がい者向け自律型誘導ロボット「AIスーツケース」大阪・関西万博での実証実験

アルプスアルパイン(株)、オムロン(株)、清水建設(株)、日本アイ・ビー・エム(株)の4社が正会員として活動する(一社)次世代移動支援技術開発コンソーシアム(以下、コンソーシアム)は、2025年日本国際博覧会(以下、大阪・関西万博)の会場内で、視覚障がい者向けナビゲーションロボット「AIスーツケース」の実証実験に取り組むことを発表した。日本科学未来館が中心となり開発を進める特別モデルのAIスーツケースを、コンソーシアムが長期間、複数台同時に運用する計画であるという。
「AIスーツケース」は、視覚に障がいのある方を目的地まで自動で誘導することを目的に開発されているスーツケース型ロボットである。これまで、コンソーシアムと未来館が相互に技術協力を行うことで、大型ショッピングモールや新千歳空港、未来館などの屋内施設や、未来館から最寄り駅までの屋外空間などで、一般ユーザーによるナビゲーション技術の実証実験を行ってきた。今年4月からは、未来館で毎日定常的に試験運用を行い、より多くの実証データを蓄積することで、人混みでの誘導や障害物の回避などのナビゲーション技術のさらなる向上に取り組んでいる。(画像はイメージ)
大阪・関西万博では、「未来社会ショーケース事業」の「スマートモビリティ万博」領域において、会場内で次世代の様々なロボットを実装・実証する「ロボットエクスぺリエンス」の展開が計画されている。このたびAIスーツケースが参加予定者の一つとして採用された。段差の乗り越え機能を強化した新車輪機構や、低位置の障害物も認識するセンサを新たに追加するなどの改良を重ねた屋内外共通利用型の万博特別モデルを未来館が中心となり開発し、コンソーシアムが実証に用いる計画である。会場内で複数のAIスーツケースを長期間にわたり同時に運用することで、社会実装に向けた運用モデルの技術的な課題を洗い出すなどの検証を行う予定である。具体的な運用期間やエリアなどは、公益社団法人2025年日本国際博覧会協会と調整を進めていくとのこと。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000501.000046783.html
三菱電機とNTT Com、AIを活用した国産によるIoT・OT向けセキュリティソリューション
三菱電機(株)とNTTコミュニケーションズ(株)〔以下 NTT Com〕は、日本電信電話(株)〔以下 NTT〕と共同開発した製造現場などに使われるIoT・OT(※1)向けネットワーク異常検知システム (以下 本ソリューション) の提供を2024年5月28日に開始する。
本ソリューションの一部は、内閣府の政策のひとつである「戦略的イノベーション創造プログラム(SIP)(※2)」における「IoT社会に対応したサイバー・フィジカル・セキュリティ」(管理法人:NEDO(※3))の成果を活用している。
本ソリューションには、NTTが開発したAI分析エンジン(※4)が搭載されており、AIによる「ふるまい異常検知」(※5)を活用し、重要インフラや製造現場などにおけるIoT・OT領域のセキュリティを強化する。
1. 背景
国内では従前からの社会課題として、労働力不足が深刻化している。労働力不足を補う1つの策として業務のDX が進んでおり、DX関連(重要インフラや製造現場のIoT化など)の設備投資は2020年から2022年で約2倍の伸び(※6)を示しているが、IoT・OT機器の導入が進むに伴い、サイバー攻撃のリスクも高まっている。
サイバー攻撃の手法は日々高度化しており、従来のパターンマッチ型(※7)では検知できない攻撃が増加しているため、AIを活用した「ふるまい異常検知」が必要である。また、経済安全保障の観点で国産技術を用いた対策への期待も高まっている。
2. 本ソリューションの概要
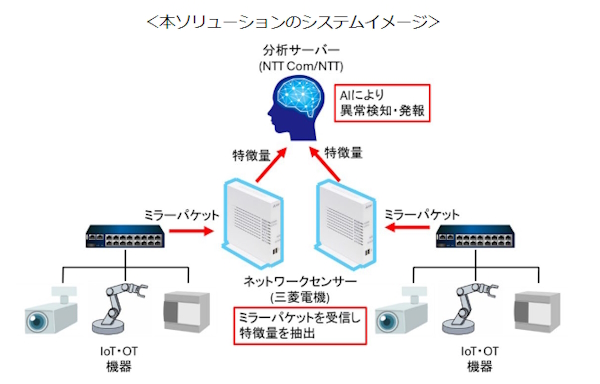
本ソリューションは、IoT・OT機器のネットワークトラフィック(※8)を監視対象とし、深層学習(※9)を活用したAIによる国産の「ふるまい異常検知」ソリューションであり、IoT・OT領域のセキュリティを強化するものである。本ソリューションはネットワークセンサーと分析サーバーから構成されており、ネットワークセンサーは三菱電機が、分析サーバーはNTT ComおよびNTTが開発した。
三菱電機製造現場内で実証を行い、有効性を確認できたことからお客さまへの提供を開始する。
3. 本ソリューションの特長
(1) AIによる「ふるまい異常検知」でネットワークトラフィックを解析し未知の攻撃を検知
本ソリューションは、ネットワークトラフィックの特徴量を、深層学習を活用したAIで分析することで従来のパターンマッチ型では対応が困難だった未知の攻撃にも対応する。
本ソリューションは数十項目のネットワークトラフィック特徴量を評価した学習モデルにより、異常な通信を検知、発報できる。
例として、通常のネットワークトラフィックに対しては次のようなパラメーターの変化を検知しする。
① 機器間の通信量、通信頻度
② 送信元、送信先のIPアドレス、通信ポート、プロトコル
③ 新規通信機器の接続
④ パケットフラッディング(※10)
(2) 多数の標準仕様プロトコルや独自仕様プロトコルに対応
監視対象システムごとに異なるIoT・OT機器の標準仕様のプロトコルや独自仕様のプロトコルに対して、プロトコル仕様によらずに通信の特徴を自動的に学習することで監視対象システムに適応した異常な通信を検知、発報できる。
(3) 既存システムへの接続容易性
お客様が利用している既存システムのネットワーク機器のトラフィック管理専用ポート(ミラーポート)に、本ソリューションのネットワークセンサーを接続するだけで、既存システムの構成を大きく変更せずに容易に導入可能。これにより導入時の業務影響を最小限に抑制する。
4.各社の役割
・三菱電機 : ネットワークセンサーの開発および本ソリューションの販売
・NTT Com : 分析サーバーの開発および本ソリューションの販売
・NTT : 分析サーバーおよびAI分析エンジンの開発
〔注釈〕
※1:OTとは、Operational Technologyの略語です。製造現場やプラント、ビルなどの機器を制御、運用するシステムや技術のこと。
※2:戦略的イノベーション創造プログラム(SIP)とは、内閣府による「科学技術・イノベーション政策」の中の1つ。詳細は右記のURLをご参照。https://www8.cao.go.jp/cstp/gaiyo/sip/
※3:NEDOは、国立研究開発法人 新エネルギー・産業技術総合開発機構の略称。
※4:AI分析エンジンはNTT社会情報研究所およびNTTネットワークイノベーションセンタが研究開発を担当した。
NTT社会情報研究所 https://www.rd.ntt/sil/collaboration/
NTTネットワークイノベーションセンタ https://www.rd.ntt/nic/
※5:ふるまい異常検知とは、事前に正常となるパターンを登録し、パターンから外れた通信を検知する方法。
※6:2023年版ものづくり白書 経済産業省 厚生労働書 文部科学省を参照している。
https://www.meti.go.jp/report/whitepaper/mono/2023/pdf/gaiyo.pdf
※7:パターンマッチ型とは、事前に異常となるパターンを登録し、パターンにマッチした通信を検知する方法。
※8:ネットワークトラフィックとは、ネットワーク上で送受信されるデータの流れのこと。
※9:深層学習とは、機械学習の手法の1つであり、十分なデータ量を学習させることでその特徴を抽出し学習するAI技術。
※10:パケットフラッディングとは、ネットワーク内の機器において許容量を超える大量の通信が発生し、動作に支障をきたすこと。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000129.000120285.html