
産業技術総合研究所
大崎寿久

情報理工学系研究科
教授 竹内昌治
1.はじめに
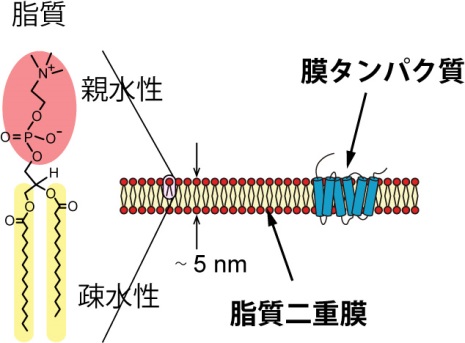
細胞膜は、細胞の内外を隔てるだけでなく、細胞内小器官を形作るなど、細胞の主要な構成要素の一つとなっている。細胞膜は、主に脂質二重膜と膜タンパク質からなる(図1)。脂質二重膜は両親媒性の脂質分子からなり、疎水性の炭化水素鎖を向かい合わせた膜構造をとることで、特にイオンや親水性分子に対する隔壁となっている。一方で、膜タンパク質は脂質二重膜中に存在し、膜を介した情報伝達や物質輸送の役割を担っている。細胞膜を人工的に再構成する試みは、古くは1960年頃から行われてきたが、近年、MEMS技術の利用により簡便に再現良く脂質二重膜を形成できるようになってきた。また、そうしたデバイスは細胞膜機能の解明に使われ、さらに細胞膜機能を活用するセンサの研究へと発展している。本稿では、MEMS技術を利用した人工細胞膜の作製方法と、そのセンサ応用の現状に関して、筆者らの研究を中心に紹介する。
2.MEMS技術を利用した脂質二重膜形成デバイス
脂質分子は親水基と疎水基をもつことから、気液界面や油水界面で脂質単分子膜を自発的に形成する。脂質二重膜は、こうした脂質分子の自己組織化を利用することで作製できる。旧来は、微小孔を設けた疎水性高分子フィルムを水相に設置しておき、微小孔に刷毛で脂質分散油を塗布することで脂質二重膜を得る刷毛塗り法や、気液界面に形成した単分子膜に高分子フィルムを沈めることで、その表裏に単分子膜を転写して微小孔に脂質二重膜を形成するMontal Mueller法などが用いられていた。しかしながら、これらの方法は実験者の技量に頼るところが大きく、工学的に広く脂質二重膜を利用するには至らなかった。
2000年代以降、MEMS技術を利用した脂質二重膜形成デバイスが提案されるようになった。例えば、2つのマイクロ流路の交差する部分に微小孔を設けたデバイスでは、片側の流路には水溶液を満たし、もう片側に脂質分散油と水溶液を逐次導入することで、脂質二重膜を形成できる。マイクロ流路における層流の効果を利用することで、連続して流れる油相と水相が混合することなく、また微小孔周辺のみに油相が残留して、刷毛塗り法の要領で膜が形成される。片方の流路はマイクロウェル形状でもよく、ウェルをアレイ化すれば一度にたくさんの脂質二重膜を形成することもできる(図2)1-3)。
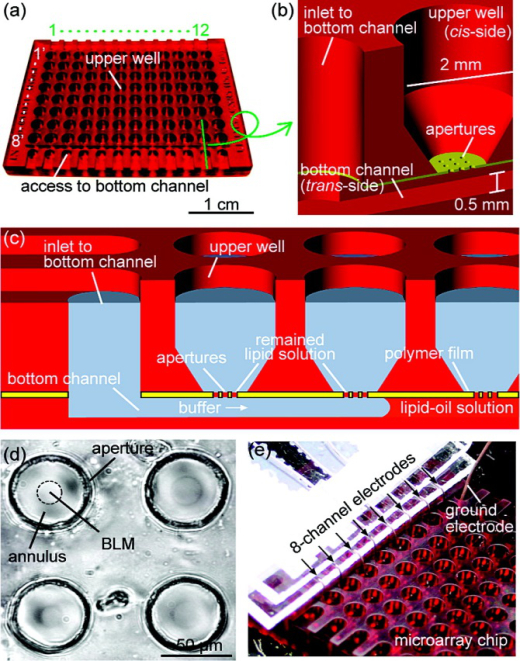
Reprinted with permission from Ref. 1. Copyright 2009 American Chemical Society.
より簡便な方法として、竹内らは脂質を分散した油中水滴2つを接触させるとその界面に脂質二重膜が形成されることを報告した4)。液滴同士の接触を保つため、2つの円筒ウェルが重なった「8」字型ウェルを準備し、まず脂質を分散したデカン溶液を、続いて水溶液を滴下する2段階のピペット操作のみで脂質二重膜を安定的に作製できる(図3)。この液滴接触法は、液滴サイズと距離を規定することで容易に再現良く脂質二重膜を形成できる方法として、世界的にも広く普及している5,6)。
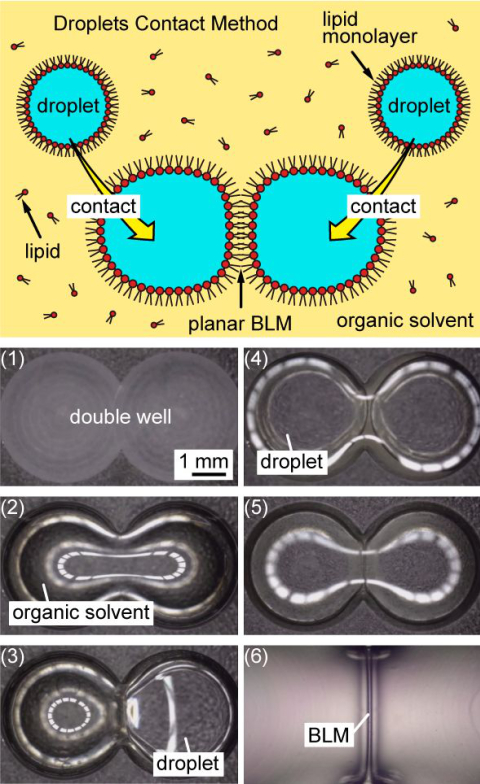
Adapted from Ref. 5, Copyright 2013, with permission from Elsevier.
MEMS技術は、脂質二重膜形成法のみではなく、その安定性に関しても貢献している。脂質二重膜は、疎水性相互作用(非共有結合性)による脂質分子2層からなる。厚さは5 nm程度であり、物理的・電気的刺激により容易に破壊されることが知られている。脂質二重膜の安定性を向上させる方策として、形成される膜面積と、膜を保持する微小孔の材料特性・形状の制御が考えられる。旧来は、熱した針を使って穿孔することによりテフロンなどの高分子フィルムに微小孔を作製していたが、現在はフォトリソグラフィプロセスを利用することで、直径100 μm以下の微小孔に対してもサイズや形状を精度良く制御可能となり、膜安定性向上に寄与している7)。一方で、微小孔の縁部分の厚みを脂質二重膜の厚さに近づけることによって安定性を向上させる研究も行われている。平野らは、シリコンの微細加工によって、微小孔の縁をナノメートルスケールのテーパーをもつ滑らかな形状とすることで、形成される脂質二重膜の機械的強度を高めることに成功した8)。
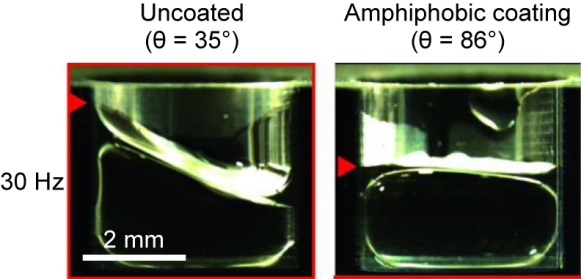
別の観点として、脂質二重膜に接する水溶液の振動が、膜破壊に及ぼす影響についても研究がなされている9)。脂質二重膜の安定性は、機械的振動に対する膜破壊率を観測することによっても評価することができる。竹内らは、形成された脂質二重膜が理論的予測とは異なる周波数域で破壊されることに着目し、その原因が、膜が接する液滴の振動にあることを見出した。低周波数域で液滴の振動を抑制するには、液滴の共振周波数を高周波数域に変化させるための微小化や、液滴との界面張力を上昇させるためのウェル表面の撥水撥油処理が重要であることを明らかにした(図4)。
Adapted from Ref. 9, Copyright 2018, with permission from Elsevier.
手振れや移動など環境要因で発生する振動は100 Hz程度以下であるとされる。以下の節で紹介する人工細胞膜のセンサ応用では、脂質二重膜そのものに加えて、上記のように膜に接する溶液の安定性の観点も必要になる。
次回に続く-
1) T. Osaki, H. Suzuki, B. Le Pioufle and S. Takeuchi, Anal. Chem., 2009, 81, 9866-70.
2) S. Ota, H. Suzuki and S. Takeuchi, Lab Chip, 2011, 11, 2485.
3) R. Watanabe, N. Soga, D. Fujita, K. V Tabata, L. Yamauchi, S. Hyeon Kim, D. Asanuma, M. Kamiya, Y. Urano, H. Suga and H. Noji, Nat. Commun., 2014, 5, 4519.
4) K. Funakoshi, H. Suzuki and S. Takeuchi, Anal. Chem., 2006, 78, 8169-8174.
5) D. Collard, S. H. Kim, T. Osaki, M. Kumemura, B. Kim, D. Fourmy, T. Fujii, S. Takeuchi, S. L. Karsten and H. Fujita, Drug Discov. Today, 2013, 18, 552-559.
6) M. J. Booth, V. Restrepo Schild, F. G. Downs and H. Bayley, Mol. BioSyst., 2017, 13, 1658-1691.
7) R. Kawano, Y. Tsuji, K. Sato, T. Osaki, K. Kamiya, M. Hirano, T. Ide, N. Miki and S. Takeuchi, Sci. Rep., 2013, 3, 1995.
8) D. Tadaki, D. Yamaura, S. Araki, M. Yoshida, K. Arata, T. Ohori, K. Ishibashi, M. Kato, T. Ma, R. Miyata, Y. Tozawa, H. Yamamoto, M. Niwano and A. Hirano-Iwata, Sci. Rep., 2017, 7, 17736.
9) Y. Izawa, T. Osaki, K. Kamiya, S. Fujii, N. Misawa, S. Takeuchi and N. Miki, Sensors Actuators B Chem., 2018, 258, 1036-1041.
【著者紹介】
大崎 寿久(おおさき としひさ)
神奈川県立産業技術総合研究所 人工細胞膜システムグループ サブリーダー
■略歴
2002年 東京工業大学大学院理工学研究科 博士課程修了
2002年 ライプニッツ高分子研究所 博士研究員
2006年 産業技術総合研究所 特別研究員
2007年 東京大学生産技術研究所-LIMMS/IIS-CNRS CNRS博士研究員
2009年 神奈川県立産業技術総合研究所 サブリーダー、現在に至る
専門は界面物理化学、高分子材料科学。2007年より、細胞膜をマイクロチップ中で再構成するためのプラットフォーム技術に関する研究に従事。近年は膜タンパク質機能解析やそのセンサ応用について実用化研究を進めている。
竹内 昌治(たけうち しょうじ)
東京大学 大学院情報理工学系研究科 教授
■略歴
2000年 東京大学大学院工学系研究科 博士課程修了
2000年 日本学術振興会 特別研究員
2001年 東京大学生産技術研究所 講師
2003年 同 助教授(2007年より准教授)
2014年 同 教授(2019年より兼務)
2019年 東京大学情報理工学系研究科 教授
この間、2004-2005年 ハーバード大学化学科 客員研究員、ほか
専門はバイオハイブリッドMEMS。3次元組織構築、体内埋め込み型デバイス、人工細胞膜、培養肉などのプロジェクトに従事。
ディスプレイとライダーのためのMEMSミラーの設計基本ポイント(1)

大学院工学研究科
教授 羽根一博
1. はじめに
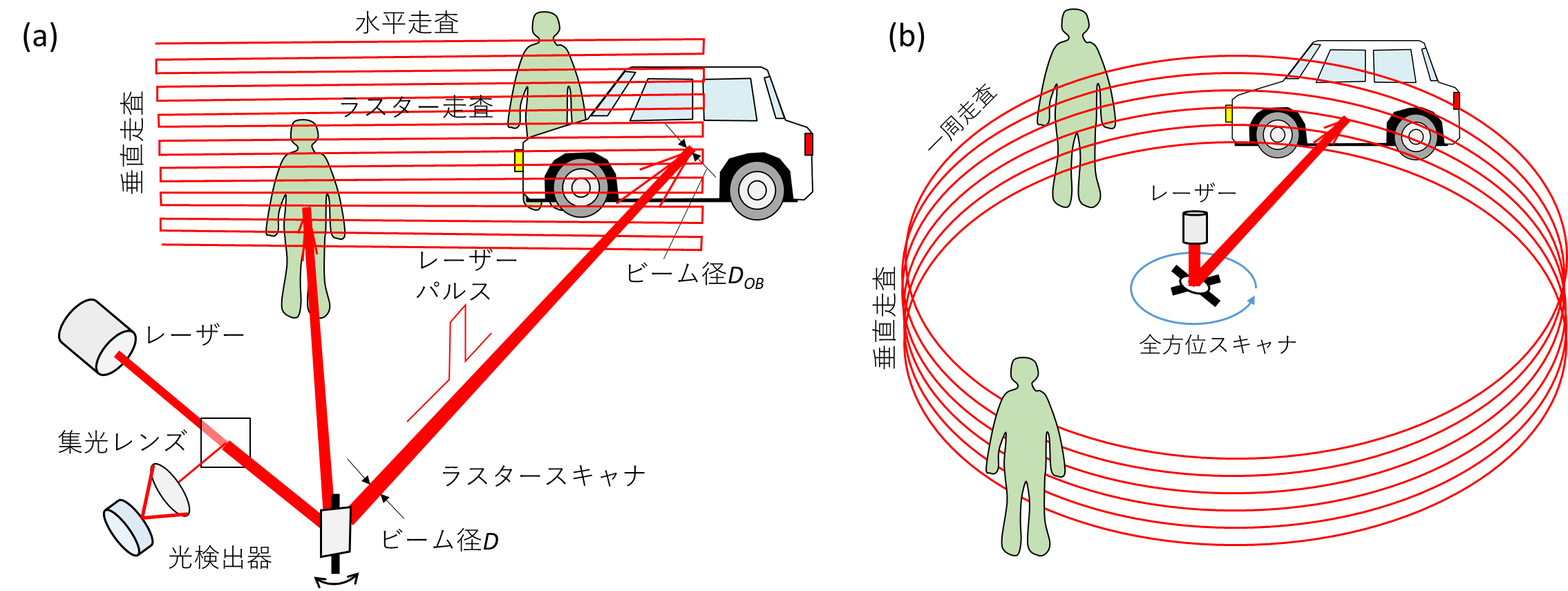
MEMSミラーはレーザーのスキャナとして古くより開発されてきた。現在では携帯型のレーザープロジェクタとして市販されている。また、車の自動運転に必要な距離画像を得るため、レーザーパルス光の反射時間を測定するライダー(LiDAR: Light Detection and Ranging)におけるレーザービームの走査にもMEMSミラーの利用が期待されている。しかし、ディスプレイ用のミラーでは、要求される解像度は高くなり(HDで横1920)、高い走査周波数も要求される。解像度を上げるためには、ミラー径と走査角を大きくする必要があるが、重いミラーとなり高い走査周波数の要求と矛盾する。また、ミラーの回転ねじればねの破壊限界も制限となる。ライダーにおいては、現在はディスプレイほどの解像度は要求されないので、前方用のライダーでは、ラスター走査できる低解像度ディスプレイ用ミラーを利用できる。レーザーパルスを同じミラーで受光する場合には、受光感度を上げるため、大きな径のミラーが必要で、大きな走査角も要求される。自動車では、厳しい耐久性と信頼性が要求されるので、振動の影響や破壊寿命の問題を解決することも不可欠である。本稿では、機械設計の基本から考え、上記の問題の限界と新しい取り組みを紹介したい。
2. 解像度とミラー径の関係
ミラー径は大きい方が、回折の効果が少ないので、物体の解像度はよくなる。LiDARの最大走査角(全光学角)θOptの中で分解できるスポットの数(解像スポット数)をNとして、目安はθOpt/Nがビームの回折広がり角DOB/L(L:物体距離、DOB:物体上のレーザースポット径)と等しくなればよい。厳密な回折と解像度Nの定義より、ミラーの直径をD、λを波長として、

となる1)。このように、光学的な制限から、分解能、走査角、ミラー直径、波長は関係付けられている。解像度を上げるには、大きいミラー径が必要である。
一方、ミラーの往復振動走査により、ミラー面は動的に変形する。変形の最大値δmaxは、最大走査角のときに現れて、

となる1)。ここで、f0 , tm , E, ρは、それぞれ、走査周波数、ミラー板の厚さ、ミラーのヤング率と密度である。変形をλ/10以下に抑えなければ、変形により、スポット強度が下がりスポット形状が劣化する。変形δmaxがミラーの径の5乗に比例しているので、高速走査ではミラー径の拡大は容易ではない。従って、変形を抑えるためにはミラーの厚さを厚くする必要がある。
3.運動非線形と破壊限界
ディスプレイにおけるレーザーの走査には、2方向にミラーの角度を走査できる2軸のスキャナが用いられる。ライダーの走査においても、図1に示す2方式があり、ラスター走査(図1(a))と全方位走査(図1(b))である。どちらも2軸のスキャナを用いる。2軸スキャナの方式は、ジンバル型とジンバルレス型が研究されている。図2(a)、 (b)はそれらの基本構造を示している。ジンバル型は、1軸スキャナをジンバルフレームに組み込み、シンバルフレームをミラー軸に直行する軸で回転させる。ディスプレイ用のスキャナにはジンバル型のものが多い。ジンバルレス型のミラーは、曲げばねでミラーを支持し、ミラーを2軸に傾けて回転する。アクチュエータは対称に配置でき、配線等は容易になる。
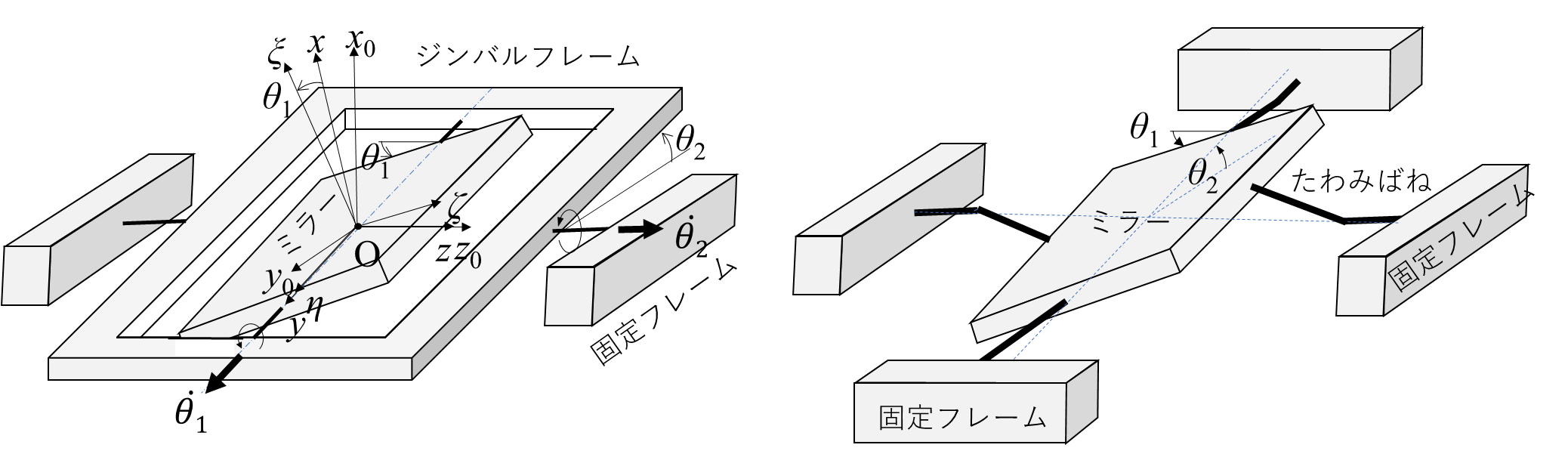
図2(a)において、ミラーはねじればねに支持されて往復回転振動する。回転角を増すため、一般には機械共振周波数f0で走査する。ねじればねは、エッチングで製作されるので、断面は矩形である。簡単のため、ばねの断面を一辺の長さa の正方形とし、長さをℓとすると、材料の横弾性係数G(=61.5GPa(Si))を用いて、2本のねじればねの合計のばね定数は、
で与えられる2)。一方、シリコンの破壊の最大せん断応力τmaxは最大光走査角θoptのとき、ねじればねの幅の中央で発生し、
で与えられる2)(実際は、ばねの付け根部分に応力集中する場合が多い)。走査角は破壊応力の制限を受ける。共振走査周波数f0は慣性モーメントIθとばね定数kθより2πf0 = √(kθ/Iθ)で与えられ、θoptはf0, Iθ, kθ, γθにより与えられる。γθは運動方程式の減衰係数である。従って、解像度はγθが分かれば、周波数f0と関係付けられる。図3にミラー直径Dをパラメータとして解像度Nの共振周波数f0依存性の計算例を示した3)。ここで、計算において、λ =0.7μm, a =20μm, ℓ=150μm, ミラーの厚さ10μmとした。また、τm = 1.6GPaを用いた4)。
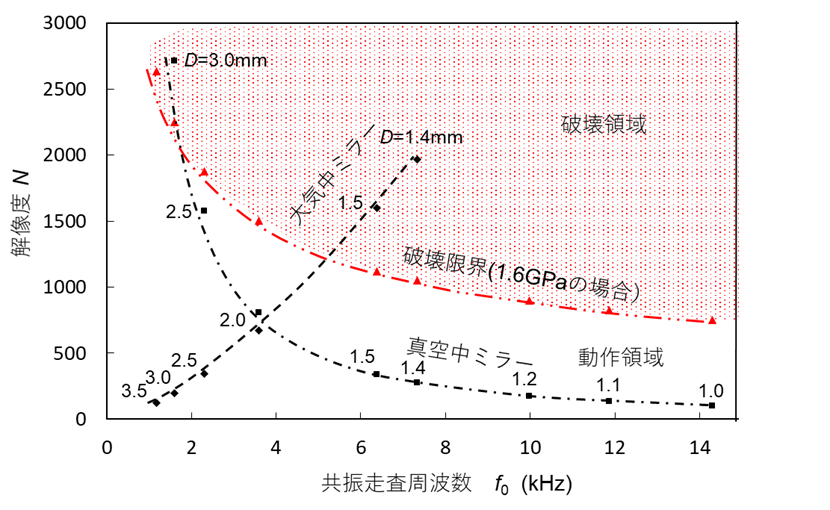
図3より、空気中と真空中でミラーを共振駆動させた場合、解像度の周波数依存性は全く異なることが分かる。空気中では、ミラー直径を小さくして、共振周波数を上げるように設計すると解像度は上がる方向に変化する。これはミラー径が小さくなって解像度が下がるよりも、ミラー径が小さくなって空気摩擦が減って回転角が上がる効果の方が大きいことによる。ミラーの径をあまり小さくしすぎるとこの関係は成り立たない。また回転角が大きくなってトーションバーの破壊限界に到達する。これらの兼ね合いでミラー径と解像度、共振周波数を決める必要がある。一方、真空中の共振ミラーの場合は、空気の摩擦がないので、大きいミラーの方が慣性は大きく、大きい角度が得られる。しかし大きい慣性のため、共振周波数は低下する。破壊限界の特性曲線と似た依存性を示すので、高解像度低速走査と低解像度高速走査のミラーを設計しやすい。実際には、走査ミラーのパラメータはいくつもあるので、いろいろな評価を行って最適の設計を行う必要がある。
次に、2軸ミラーの運動方程式を考える。ジンバル型において運動方程式を導出すると、θ1、 θ2 に関しての連立非線形方程式となる。空気摩擦等による減衰トルクを γ1  1 、 γ2 2 (γ1、 γ2 は簡単のため定数)として加え、アクチュエータによる外力は、ミラーとフレームの軸 (η z) において、トルクN1 、 N2とする。各軸の回転角 θ1、 θ2 の運動は以下の方程式で表される5,6)。
1 、 γ2 2 (γ1、 γ2 は簡単のため定数)として加え、アクチュエータによる外力は、ミラーとフレームの軸 (η z) において、トルクN1 、 N2とする。各軸の回転角 θ1、 θ2 の運動は以下の方程式で表される5,6)。

式(5)、 (6)より、ミラーとフレームの運動はこれらの方程式の第2項などにより、複雑に相互作用している。
ラスター走査の場合、フレームの周波数(角周波数ω2)はミラーの周波数(角周波数ω2)より2桁小さくω2/ω1<1/100であるので、ミラーの運動に対するフレームの非線形力の影響は小さいと思われる。一方、フレームの運動に対するミラーからの非線形力の影響は大きいが、フレームのゆっくりした運動に、早い周期的のミラーからの非線形力が加わるだけで、平均的なゆっくりした運動はあまり影響を受けないと思われる。従って、ラスター走査では、比較的安定な走査が行えると考えられる。
一方、図1(b)の全方向走査ではω1 = ω2であるので、ミラーの運動に影響するフレーム運動の非線形項はラスター走査の場合に比較して3~4桁大きいと考えられる。このように、全方向走査においては運動の非線形性がかなり強いと考えられる。ミラーの厚さが直径より十分小さい場合、共振周波数近傍の運転において、式(5)の第2項の最大値は、角度振幅 θmに対して、~k1 θm3程度と見積もれるので、ばね定数k1の反発力と組み合わせて、ばね定数は、おおざっぱにはk1 (1-θm2) のように表せる。従って、ソフトスプリングのような非線形性を示すと考えられる。ここで注目される点は、もし、慣性モーメントIξ と Iζ が等しい場合、これらの相互作用はなくなり、ミラーとフレームは、ほぼ独立に運動できると考えられることである。一般的には、2軸の回転の運動非線形が生じる。このため、ばねが線形であっても、非線形スプリングに似た振動が発生する。回転角速度に依存した相互作用力が発生して走査できる角度に制限が生じ、走査が楕円または不安定となる場合がある。
次回に続く-
1) S.T.S. Holmstrom, U. Baran, H. Urey, “MEMS Laser Scanners: A Review”, J. Microelectromechanical Syst. 23 (2014) 259-275.
2) 清家政一郎: “材料力学”, 共立出版 (1987) p100.
3) 羽根一博, “MEMSミラーの構造, 特性とレーザディスプレイへの応用技術”, 「車載ディスプレイのHMIと視認性、安全性向上」, 技術情報協会 (2015) 319-326.
4) 泉聡志, 山口真, 笹尾邦彦, 酒井伸介, “MEMSマイクロミラーの簡易ねじり強度試験の開発.” 日本機械学会論文集A 72 (2006) 728-734.
5) K. Suzuki, T. Sasaki, K. Hane, “Motion nonlinearity of gimbaled micromirror in omnidirectional scanning for LiDAR application.” Int. Conf. Nano/Micro Eng. Mol. Sys. (NEMS) (2020) 130-133.
6) 羽根一博, 佐々木敬, :LiDARのレーザー走査用MEMSミラーの最新技術:ラスターおよび全方向スキャナの設計から試作まで”, 光技術コンタクト 58 (2020) 38-44.
【著者紹介】
羽根 一博(はね かずひろ)
東北大学 大学院工学研究科 ファインメカニクス専攻 教授
■略歴
1978年3月 名古屋大学工学部電子工学科卒業
1980年3月 同大修士課程修了
1983年3月 同大博士課程修了
1983年4月 同大助手
1985年2月から13ヶ月 カナダ国立研究所物理部門客員研究員
1990年8月 名古屋大学助教授
1994年4月 東北大学教授
非冷却赤外線イメージセンサ(1)

理工学部 特任教授
木股雅章
1. はじめに
MEMS (Microelectromechanical Systems) 技術は、LSIと同じようなプロセス装置を使って三次元構造を作る製造技術である。MEMS技術は他の技術では実現できない機能や性能をもったデバイスを数多く市場に送り出してきた。非冷却赤外線イメージセンサもそうしたデバイスの一つで、MEMS技術の特長を有効に活用して発展してきた。過去30年間の非冷却赤外線イメージセンサの進歩は、MEMS技術に支えられてきたと言っても過言ではない。
ここでは、MEMS技術が非冷却赤外線イメージセンサの開発の中で果たした役割を振り返るとともに、現状と今後について考える。
2. 熱型赤外線検出器
図1に非冷却赤外線イメージセンサに使用されている熱型赤外線検出器の基本構造と構成要素の働きを示す。受光部は赤外線吸収層と温度センサからなり、断熱構造で基板と繋がっている。熱的にヒートシンクとして働く基板の上には信号読出回路が形成されている。
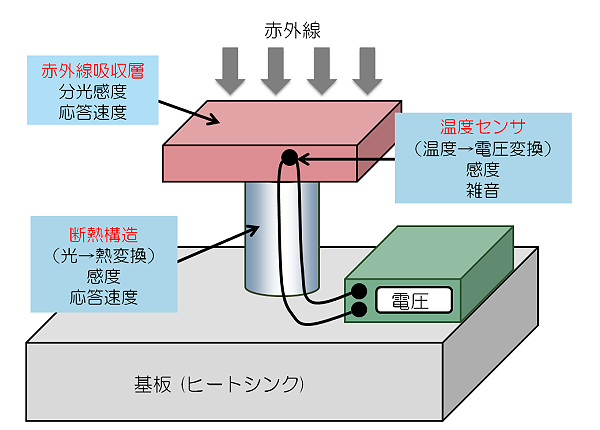
熱型赤外線検出器は、受光した赤外線のエネルギーを熱に変換し、受光部の温度変化として赤外線を検出する。受光部が温度変化して受光部と基板の間に温度差できると、熱流が生じる。単位時間あたり移動する熱量は、受光部と基板の間の温度差に比例し、断熱構造の熱コンダクタンスに反比例する。定常状態では、単位時間あたりに移動する熱量と受光部が吸収する赤外線エネルギーが等しくなるので、一定の赤外線入射に対する受光部の温度変化は、熱コンダクタンスに反比例する。温度センサは、受光部の温度変化を電圧に変換する。熱型検出器の感度は、受光部の温度変化と、その温度変化に対する温度センサの出力の大きさで決まるので、熱コンダクタンスに反比例し、温度センサの感度に比例する。
熱型赤外線検出器の応答速度は、受光部の温度変化の時定数(熱時定数)で決まる。熱時定数は受光部の熱容量と熱コンダクタンスの比で決まる。熱容量が一定の場合、熱コンダクタンスを小さくすると感度は高くなるが、応答速度の悪化を招くので、感度と応答速度はトレードオフの関係にある。通常、非冷却赤外線イメージセンサは自然な動画が得られるよう熱時定数が10 ms程度になるように設計されている。
熱型赤外線検出器の分光感度特性(感度の波長依存性)は、赤外線吸収層の吸収率の波長依存性で決まる。非冷却赤外線イメージセンサに用いられる赤外線検出器には、8~14 μmの波長範囲で高い吸収率が得られる赤外線吸収層が用いられる。赤外線吸収層は受光部の一部であるので、熱時定数の観点から低熱容量であることが要求される。
熱型赤外線検出器の温度センサの雑音は性能を決める重要な要因になる。非冷却赤外線イメージセンサでは、特に1/f雑音が問題になることが多い。
3. 開発初期にMEMS技術が果たした役割
MEMS技術は非冷却赤外線イメージセンサが実用段階に入った1990年前後に非常に重要な役割を果たした。ここでは、開発初期にMEMS技術が果たした役割を概観する。
図2に非冷却赤外線イメージセンサ開発初期の感度改善の状況を模式的に示した。図中のグラフは、画素ピッチを50 μmとして熱型検出器の感度をモデル計算した結果で、横軸は断熱構造の熱コンダクタンスで、縦軸は相対感度である。
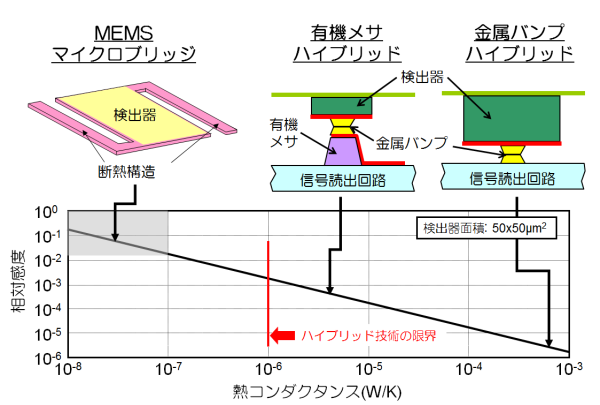
1980年代後半まで、非冷却赤外線イメージセンサの画素構造は、図2の右上に示す金属バンプハイブリッド構造であった。この構造は、別チップとなっている検出器と信号読出回路を金属バンプで画素ごとに電気接続したものである。この場合、図1の断熱構造に相当するのが金属バンプとなるので、熱コンダクタンスは10-4 W/K台であった。この構造は高熱コンダクタンスのため十分な感度を得ることはできなかったが、1990年代に入り図2の中央上のような有機メサを含むハイブリッド構造が開発され、熱コンダクタンスは2桁以上低減され、実用化レベルの感度が達成された。
有機メサハイブリッド構造の開発は、非冷却赤外線イメージセンサの研究開発の歴史の中で革新的なものであったが、図2に示したように、この延長線での性能改善には限界が見えていた。こうした状況で非冷却赤外線イメージセンサの製造にMEMS技術を導入することが試みられ大成功を収めた1)。図2に示したように、MEMS技術で製造されるマイクロブリッジ構造を用いると熱コンダクタンスを10-7 W/K以下に低減することができたので、ハイブリッド構造の限界より1桁以上高い感度が得られるようになった。
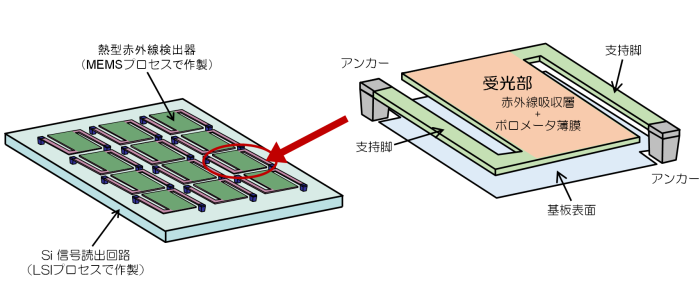
図3にMEMS技術で製造される非冷却赤外線イメージセンサと画素の構造を示す。マイクロブリッジ画素では、受光部は2つの支持脚(図1の断熱構造に相当)で支えられており、受光部と基板表面の間には空間が形成され、支持脚はアンカーの部分で基板と接している。支持脚の熱コンダクタンスは細長い形状とすることで小さくすることができる。非冷却赤外線イメージセンサは、シリコン信号読出回路の上にマイクロブリッジ画素を2次元配列したモノリシック構造で、LSIプロセスで信号読出回路を形成したのちMEMSプロセスを経て完成する。この製造プロセスは多数の素子を載せたウエハの形で行うことができる。
以上のように、MEMS技術は性能と生産性の両面で非冷却赤外線イメージセンサの開発初期に非常に重要な役割を果たした。
次回に続く-
1) 1) R. A. Wood, et al., Tech. Dig. IEEE Solid-State Sensor and Actuator Workshop, pp. 132-133 (1992).
【著者紹介】
木股 正章(きまた まさふみ)
立命館大学 理工学部 特別任用教授
■略歴
1976年 名古屋大学大学院工学研究科修士課程修了。同年 三菱電機株式会社入社。
2004年 三菱電機株式会社退社。同年 立命館大学理工学部教授。1980年より現在まで赤外線イメージセンサの研究開発に従事。
2009年よりJAXAのType-II超格子赤外線センサの開発に参画。電気学会、日本赤外線学会、応用物理学会、IEEE会員、SPIEフェロー。
2013~2014年 日本赤外線学会会長。
2016年 立命館大学退職。同年 立命館大学理工学部特任教授。
1988年 市村賞貢献賞、1993年 全国発明表彰内閣総理大臣発明賞、2016年 日本赤外線学会業績賞などを受賞。工学博士。
スイッチサイエンス「ISP1807搭載BLEマルチセンサーボード」を販売開始
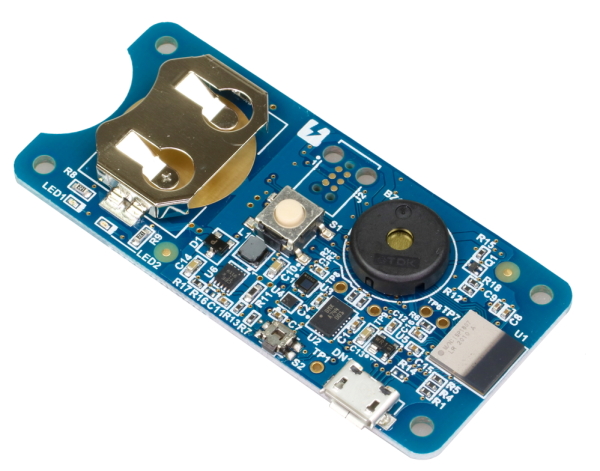
(株)スイッチサイエンスは、「ISP1807搭載BLEマルチセンサーボード」を、スイッチサイエンスのウェブショップにて2020年10月29日より販売開始した。
ISP1807は、nRF52840(ノルディック社のBluetooth Low Energy対応システムオンチップ)とアンテナを8mm角のパッケージに統合した、Insight SiP社の超小型モジュール。
「ISP1807搭載BLEマルチセンサーボード」は、ISP1807をメインに、加速度・磁力・ジャイロ・温度・湿度・気圧の6つのセンサを搭載しており、CR2025またはCR2032コイン電池で動作可能なため、ISP1807の評価ボードとしてだけではなく、ビーコンやセンサデバイスなどのIoTプロジェクト開発に便利に使えるという。
このボードは、ブートローダを書き込み済みで、Arduino IDEまたはCircuit Pythonを使用してプログラムを開発できる。プログラムで利用可能なタクトスイッチとLEDをそれぞれ2個、さらに圧電スピーカーも搭載している。
また、基板外形はRaspberry Pi Zeroと同じなので、Raspberry Pi公式のRaspberry Pi Zeroケースを使えるとのこと。
「ISP1807搭載BLEマルチセンサーボード」の特徴
・ISP1807(ARM Cortex-M4F CPU、1MB Flash、256KB RAM)
・BMX055 9軸センサ(3軸加速度、3軸磁力、3軸ジャイロ)
・HDC2010 温湿度センサ
・LPS22HB 気圧センサ
・TPS63030 高効率昇降圧コンバーター
・圧電スピーカー1個
・タクトスイッチ2個
・LED2個
・コイン電池ホルダー(CR2025またはCR2032)
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000007.000064534.html
スマートライティングデータを活用し、気象情報の予測精度向上を目指す
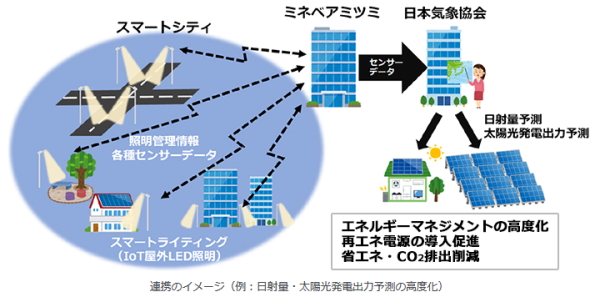
一般財団法人 日本気象協会とミネベアミツミ(株)は、「スマートライティング※1」のデータを活用し、気象情報の予測精度向上を図る取り組みを連携して進めている。このたび、具体的な取り組みのひとつとして、2020年9月から2021年3月までの期間にて、日射量・太陽光発電出力予測の精度向上に関する実証実験を開始した。
|背景|
自治体などが所有する道路灯や街路灯などをインテリジェント化・IoT化した「スマートライティング」は、LED化や、周辺環境に応じた照明の調光などにより、省エネ・CO2排出削減を実現する屋外照明技術。スマートライティングのセンサ情報をリアルタイム分析することで、気象情報の予測精度向上など、さまざまな利活用が想定されている。スマートライティングは、スマートシティ※2でのエネルギー最適化の取り組みとして、地方自治体への普及が期待できるという。
|連携の目的|
日本気象協会が持つ高度な気象予測技術と、ミネベアミツミが導入を進めるスマートライティングの融合により、新たなスマートシティソリューションの展開を目指す。
日本気象協会は、独自に開発した高精度な気象予測技術を有している。この技術にスマートシティ内のスマートライティングデータを活用することで、さらなる予測精度の向上が期待できる。
ミネベアミツミは、独自に開発したスマートライティングをスマートシティのソリューションとして展開している。このスマートライティングは、照明管理だけではなく、付属のセンサから気温・照度などのデータをリアルタイムに収集することが可能。スマートライティング普及により、スマートシティ内の面的に詳細なセンサデータを収集することができる。
日本気象協会とミネベアミツミは、これらの取り組みにより、高度なエネルギー管理が可能なスマートシティやSociety5.0※3の実現に貢献していくとのこと。
|実証実験の概要|
日本気象協会とミネベアミツミが連携する取り組みのひとつとして、2020年9月から2021年3月にかけて「スマートライティングデータを活用した日射量予測の精度向上に関する業務」での実証実験(以下、「本実証実験」)を実施する。これは、環境省が公募した「令和2年度地域の既存インフラ(街路灯等)を活用したデジタルデータ基盤確立方策の検討・検証委託業務」について、代表事業者である株式会社三菱総合研究所から受託したもの。
本実証実験では、ミネベアミツミが独自開発した「無線機能付き高効率LED道路灯」と「環境センサ」を組み合わせたスマートライティングを用いて実証実験を行う。ミネベアミツミがデータ収集を行い、日本気象協会がデータの分析および日射量予測の精度向上の可能性を検証する。
なお、ミネベアミツミと日本気象協会は、従来からこの環境センサをIoT小型気象センサとして利活用するための検討を進めている。開発段階の試作機を用いて野外での観測や長期観測試験、精度検証を行い、良好な結果が得られることを確認しているとしている。
※1:スマートライティング
道路灯や街路灯などをインテリジェント化・IoT化する屋外照明技術。
※2:スマートシティ
都市の抱える諸課題に対して、ICTなどの新技術を活用しつつ、マネジメント(計画、整備、管理・運営など)が行われ、全体最適化が図られる持続可能な都市または地区。
※3:Society5.0
情報社会(Society4.0)に続く未来社会の姿として、政府の第5期科学技術基本計画で提唱された未来社会の姿。
プレスリリースサイト(minebeamitsumi):
https://www.minebeamitsumi.com/news/press/2020/1199541_13879.html
Bluetooth® Low Energyを使用した高精度位置測位システム 評価キットをリリース

アルプスアルパイン(株)は、高まる位置測位ニーズに対応すべく、Bluetooth® Low Energyチップを使用した高精度位置測位システムの評価キットを本年11月より提供開始する。
昨今、IoT(Internet of Things)活用において、自動車をはじめ生産や物流など幅広い市場において対象物の位置を高精度に測位するアプリケーション需要が高まりつつある。特に車載機器においては、スマートフォンを核としたデジタルキーなどによるMaaS(Mobility as a service)の実現には、個人認証に加え、対象装置の位置特定は欠かせない技術となっている。一方で、これまでの位置測位にはバーコードやICタグなどによる物理的なスキャニング行為が必要になったり、GPSやWi-Fi®などを利用した高価なシステム構築が必要になるなど、実用性や開発リソース負荷などさまざまな課題があった。
アルプスアルパインでは、これら課題に対応すべくこれまでも「物流トラッカー」などSub-GHz帯を利用した位置測位モジュールの製品化に取り組んできたが、現在、新たにBluetooth® Low Energyチップを利用した高精度位置測位技術の開発を進め、2021年の製品化および量産化を目指している。
これに先駆け、同社は高精度位置測位システムを利用した評価キットを開発、本年11月より提供開始する。当社の高精度位置測位技術は、2018年5月に買収を発表した米国・Greina Technologies, Inc.(RF Ranging, Inc.※1)が独自に開発した位置検出アルゴリズムを採用。電波到来角度(AoA: Angle of Arrival)/伝搬時間(ToA: Time of Arrival)の同時測定が可能なため、高精度な測位が可能なシステムである。また、位置測位には多くの市場で導入実績のあるBluetooth® Low Energyチップを使用しているので、Bluetooth®を利用している既存システムへのデータ通信が容易なため、社会実装性に優れたシステムである。
さらに、本開発キットに搭載しているチップは車載市場や民生および産業機器市場で豊富な実績とセキュリティ技術を持つNXP Semiconductors社の「KW38ワイヤレス・マイクロコントローラ」を採用。また、一つのチップを用いて測位とBluetooth® Low Energy通信を利用することが可能となっている。尚、Bluetooth® 5.1において電波到来角度(AoA)のオプション機能は既に標準化されており、現在はBluetooth SIG※2への参加を通して、伝搬時間(ToA)ならびによりセキュリティ性の高い測距技術の標準化にも取り組んでいるという。
アルプスアルパインでは、本高精度測位技術をいち早く確立、評価キットを市場へ提供することでセット機器の高付加価値化を実現させ、車載市場やEHI(Energy, Healthcare, Industry)市場における安心・安全かつ利便性に優れたユーザーエクスペリエンスの実現へ貢献していくとしている。
※1RF Ranging, Inc.はGreina Technologies, Inc.の販売会社
※2Bluetooth SIG(Special Interest Group)はBluetooth規格の開発、およびBluetooth® テクノロジーとメーカーへの商標ライセンスを監督する標準化団体
【主な特長】
独自のAoA/ToAアルゴリズムにより小型かつ高精度な位置測位を実現
1.位置測位およびデータ通信は汎用性に優れるBluetooth® Low Energyチップを採用
2.最小1つのAnchor(受信装置)によりTag(送信装置)で位置測位が可能
3.Bluetooth® Low Energyスタックを内蔵しており測位結果とデータ通信が可能
【主な用途】
車載市場:スマート電子キー、デジタルキー
産業市場:生産装置、搬送用機器(搬送ロボット、倉庫内可搬資材など)
【主な仕様】
製品名 :高精度位置測位システム評価キット
システム提供台数:Anchor2台/Tag1台 (標準) ※Anchor Tagともに接続台数を増やすことは可能
最大測距距離 :140m(見通し可能範囲)
検出精度 :検出精度 ± 30cm(見通し可能範囲) ※Anchor 1台構成時の測距精度
電源 :Anchor:5V(USB経由)
インターフェース:USB(UART)
Bluetooth®機能 :Bluetooth® Low Energy 5.0準拠 カスタムプロファイル
ニュースリリースサイト(ALPSALPINE):https://www.alpsalpine.com/j/news_release/2020/1027_01.html
極微量の試料を検査・分析し高精度測定を実現する熱分析装置「NEXTA® DSCシリーズ」
(株)日立ハイテクサイエンスは、熱分析装置の新シリーズとして、世界最高レベル*1の感度とベースライン再現性*2による高精度な測定を実現した「NEXTA DSCシリーズ」を日本国内・海外向けに発売する。
近年、材料や素材の高機能化・複合化に伴い、基礎研究から製品開発における各種材料の機能、効果が温度変化によってどのように変化するかを明らかにする熱分析装置の熱物性評価への要求は、ますます多様化・複雑化している。
高性能化と微細化が進むエレクトロニクス製品の故障解析においては、極微量な試料の分析や成分の測定を行うため、より高精度な測定を実現する高い感度と、測定における安定性と再現性を示す高いベースライン性能が求められている。また、自動車、航空機などの幅広い分野で活用されている高機能高分子、高機能フィルムの測定においても、高分子の熱特性を精度よく計測するために、同様の性能が求められている。
そうした中、熱分析装置はプラスチック・複合材料・医薬品等の有機材料やセラミック・合金等の無機材料など幅広い分野における研究開発から品質管理、故障解析まで、さまざまな用途に活用されているとのこと。
【NEXTA DSCシリーズ 特長】
1.高感度測定を実現する
NEXTA DSC600では示差熱検出(DSC信号)の温度センサである熱電対を複数本直列に接続し多重化(サーモパイル)させた自社開発サーモパイル型DSCセンサを搭載することで、0.1µW以下という高感度を実現し、より少ない試料での測定が可能となった。サーモパイル型DSCセンサを搭載したNEXTA DSC600は、高分解能かつ、業界内でも世界最高レベルの感度を特徴としたトップエンドモデルで、より最先端の材料開発や、故障解析に最適である。またNEXTA DSC200は、高感度と安定性を備えながら、コストバランスに優れたセンサを搭載したスタンダードモデルで、より幅広い用途に使用され、製品の出荷検査や受入検査、品質保証、品質管理に適している。
2.安定したベースライン再現性を実現する炉体構造
NEXTA DSC600/200は加熱部であるヒートシンクから冷却システム部に至るまでシームレスな接合技術で設計した炉体構造と、低熱容量の金属製3層構造壁を採用した。この構造によって、電気冷却システムにおける-50~300℃の測定範囲において世界最高レベルの安定性を示すベースライン再現性±5µWを実現し、高い精度で微量成分での熱物性を明確に検出できるようになった。
3.低温領域の試料観察に対応したReal View®
試料観察熱分析Real Viewは、200万画素の高解像カメラを搭載することで試料内の局所的な観察にも対応しており、ビューポート(観察窓)にはヒートアップ機構を採用したことで、従来の観察可能範囲が室温以上であった測定範囲を-50℃の低温領域にまで拡張した。これにより、低温領域における試料の融解やガラス転移*3などの過程を観察することが可能となり、幅広い測定へのニーズに応えているとのこと。
* 「NEXTA」、「Real View」は日立ハイテクサイエンスの日本及びその他の国における登録商標。
*1 日立ハイテクサイエンス調べ(20年10月時点)
*2 ベースライン再現性: 試料の測定データを高精度で繰り返し再現できること。
*3 ガラス転移:ガラス状態からゴム状態へ変化すること。
ニュースリリースサイト(hitachi-hightech):
https://www.hitachi-hightech.com/jp/about/news/2020/nr20201027.html
位置検出回路を1チップに統合した高集積耐放射線強化モータコントローラ
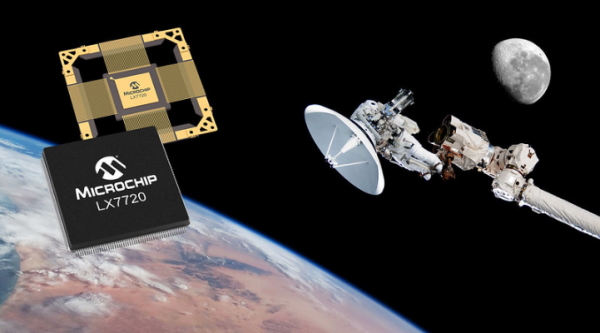
Microchip Technology Inc.は10月27日、よく使われる20超の機能を1チップに集積したSSM (Space System Manager) LX7720耐放射線強化ミクストシグナル モータ コントローラを発表した。
LX7720はRHBD(設計段階からの耐放射線強化)を採用した高集積モータ制御ICであり、従来のディスクリート ソリューションより重量と基板面積を減らす事ができる。本製品を採用する事で部品点数が減るため、検査/テストの工数を減らせる。また、接続部とはんだ接点数が減るため、接触不良を起こす可能性も減らせるという。
LX7720はモータ制御の基本機能、ロボット工学に必要な位置検出回路、多軸指示機構、光学素子の精密モーション制御機能を統合し、重量と基板面積に対する制約が厳しい人工衛星の設計に独自のソリューションを提供する。また、4つのハーフブリッジNチャンネルMOSFETドライバ、4つのフローティング差動電流センサ、パルス変調レゾルバ トランスドライバ、3つの差動レゾルバ検出入力、6つの2値論理入力、外付けFET用のパワードライバ、電圧/電流制御用ループ制御回路、位置読み出し機能(例: レゾルバ、ポテンショメータ、リミットスイッチ)、フォルト検出機能等を1チップに統合しているとのこと。
LX7720は、アプリケーションで使われるデジタルICのミクストシグナル コンパニオンIC。Microchip社のRT(耐放射線) PolarFire(R)およびRTG4TM FPGAと、最近発表したSAMRH71耐放射線強化マイクロコントローラは理想的なコンパニオン チップである。LX7720はMIL-PRF-38535 Class VおよびClass Q認定済みであり、宇宙ロボット工学および有人宇宙プログラムにおける各種モータ制御アプリケーションに採用済み。LX7720はモータドライバ サーボ制御、リニア アクチュエータ サーボ制御、ステッピング モータ、BLDCモータ、PMSMを駆動する宇宙船アプリケーションに理想的なソリューション。LX7720は100 kradのTID(電離放射線総量)と50 kradのELDRS(拡張低線量率感度)の曝露に対する耐放射線性能を備え、SEUの影響を受けないという。
ニュースリリースサイト:https://www.dreamnews.jp/press/0000224562/
Livox、近距離検知向けと長距離向け2製品のLiDARデバイス発表

Livox(Livox Technology Company Limited Co., Ltd)は新たに2つの製品をリリースする。近距離検知向けのLiDAR Mid-70、および長距離向けのLiDAR Avia。
Mid-40を発売して以来、Livoxは、自動運転、移動ロボット、地形測量調査・マッピング、セキュリティといった分野でそれぞれのソリューションを提供し、業界で世界的注目を集め、何千人ものユーザーから、高い評価を得てきた。このMid-40の成功をもとに、Livoxは製品のさらなる最適化を続け、低速度自動運転のために特別に設計したMid-70を発表する。コストパフォーマンスが非常に高いLiDARデバイスとして、Mid-70は正確な検知を実現する。
また、長距離検知におけるニーズに応え、異なるシナリオの様々なスキャニングパターンの中で切り替えることができるAvia。検知範囲は450 mに及び、操作効率性と安全性を飛躍的に向上させている。Aviaは、地形の測量調査・マッピング、送電線の点検、林業、セキュリティといった様々なシーンに使われるシナリオに最適である。LivoxはLiDARデバイスを商業用として幅広く拡大させていくとしている。
Mid-70:広視野で安全を確立
Mid-70は、FOVが水平・垂直方向ともに70.4°まで大きく改善された一方で、5 cmまで縮めることを実現。車に取り付けた場合、既存のシステムの補完としてMid-70を設置し、システムのブラインドスポットゼロにすることで、低速度自動運転の安全な視界を確保する。空港、ショップ、スーパーマーケット、病院、港といった混雑した複雑な環境の中で、Mid-70はサービスロボット、無人運搬車、無人ミニバスのような低速ロボットを支援し、周囲の環境を正確かつ総合的に感知して、ロボットがうまく障害物を回避できるようサポートする。こうして、自動運転効率を向上させるだけでなく、ロボット作業の安全性も高めるという。
Avia:全て一目見るだけで
Avia LiDARデバイスは、498 gの重さながら、測定範囲が450 mまで伸びた[※1]。Aviaは、70°に拡大したFOVで、反復、非反復スキャニングパターンを切り替えることができる。トリプルリターンの機能を使って、Aviaはより詳細なものを捉えることができるため、送電線点検、林業、モバイル地形測量調査 マッピング、スマートシティの用途に最適とのこと。
[※1]反射率80%
価格と納期
小売価格:Mid-70は83,600円(税込み)、Aviaは167,200円(税込み)。
いずれの製品もDJI正規オンラインショップhttps://store.dji.com/product-search?q=livoxにて
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000204.000015765.html
ロボットOSを搭載した自律4足歩行ロボット「SPOT用Clearpath ROSパッケージ」

アルテック(株)は、Clearpath Robotics社と、ボストン・ダイナミクス社が開発した頑丈でカスタマイズ可能な4足歩行ロボット「SPOT」にROS(Robot Operating System)*1を搭載した「SPOT用Clearpath ROSパッケージ」の販売を開始する。
*1:ROS(Robot Operating System)ロボット用ソフトウェアプラットフォーム
■SPOT用Clearpath ROSパッケージの特徴
●迅速なスタート
SPOT用Clearpath ROSパッケージは、起動するとROSを搭載しているため、新しいインターフェースを学習したり独自のROSドライバーを開発したりしなくても、すぐに動作可能。5つのオンボードカメラを通してオドメトリ、画像、点群データおよび追加のペイロードデータ等、すべてのオンボードセンシングデータストリームにアクセスできる。
●拡張性
SPOTには、専用のコンピュータ、電源、通信インターフェース、フレキシブルなペイロードマウントシステムが付属されており、ROSがサポートする様々なセンサやコンポーネントを簡単に統合することができる。IMU、追加カメラ、レーダー、LIDAR、マニピュレーター(Kinova Gen3LiteやHEBIアーム等)、カスタムペイロードを統合することで、SPOTを利用者の用途に合わせて完全にカスタマイズすることができる。
●導入支援
経験豊富なインテグレータとROSエキスパートチームが、利用者の用途に適したペイロード構成を選択し、SPOT用Clearpath ROSパッケージのセットアップを手伝う。同社が取り扱う自律走行車両と同様、ROS対応のSPOT用Clearpath ROSパッケージには、初期サポートとセットアップドキュメントが付属していて、研究やアプリケーション開発を容易に始めることができる。
●様々な利用用途
SPOTは、階段や屋外の起伏の多い場所を歩行できるだけでなく、屋内の狭い空間も歩行可能な小型4足ロボット。建設の進行状況の監視、放射線検出監視、環境モニタリング等、様々な研究開発や産業用途で使用することができる。
プレスリリースサイト:https://www.atpress.ne.jp/news/231887