産業技術総合研究所
1. はじめに
真空装置に、複数の圧力計や真空計を並べて取り付けて測定した場合、両者の値が完全に一致することは珍しく、多くの場合、多かれ少なかれ差が観測される。それでは、どちらの値が正しいのであろうか?それとも、どちらも間違っているのであろうか?1-3) 。基本単位の場合、CGPMの定義が世界共通のわかりやすい基準となっている。-2 ]に等しいので、「質量」、「時間」、「長さ」という基本単位の組み合わせとして定義することができる。同様に、電位差(電圧)の単位ボルト[V]は、[kg m2 s−3 A−1 ]に等しいので、「質量」、「長さ」、「時間」、「電流」の組み合わせとして定義することができる。基本単位以外の多くの単位は、組立単位と呼ばれ、基本単位の組み合わせとして定義される。
2. 圧力真空標準 4-6)
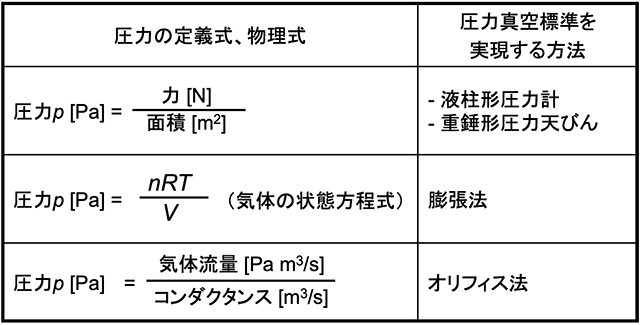
圧力真空標準とは、基本単位と物理法則に基づいて実現される“絶対値のわかった圧力場(標準圧力場)”である。圧力の単位パスカル[Pa]は、圧力範囲や目的に応じて、表1に示した4種類の方法で実現されることが多い。2 ]で除した値として定義される。この定義を使って標準圧力場を発生する方法に、液柱形圧力計と重錘形圧力天びんがある。また、圧力[Pa]は、気体の状態方程式を用いて、nRT/V (ここで、n :モル数[mol]、R : 気体定数[J mol-1 K-1 ] 、T :温度[K]、V :体積[m3 ])と表すこともできる。この物理式を使って標準圧力場を発生する方法が、膨張法である。さらに、圧力[Pa]は、真空容器に導入した気体の流量[Pa m3 /s]を、排気のコンダクタンス[m3 /s]で除した値としても表すことができる。この物理式を使って標準圧力場を発生する方法が、オリフィス法である。
表1 圧力の定義式、物理式と圧力真空標準を実現する方法
産総研は、国家計量標準機関(NMI)として、これら4つの方法を用いて圧力真空標準を実現し、発生した標準圧力場の圧力と、圧力計や真空計の読み値を比較することで、校正サービスを行っている 5,6) 。また、産総研では、真空中の分圧計測のための基準として分圧標準や、漏れ検査のための基準としてのリーク標準の整備をしているので、これらについても紹介する。
(1)液柱形圧力計(液柱差真空計)
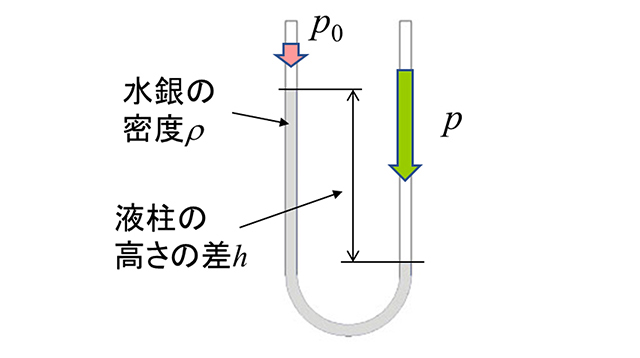
液柱形圧力計(液柱差真空計)の概略図を図1に示す。液体として、水銀が用いられることが多く、この場合、水銀マノメータとも呼ばれる。液柱両端の圧力差Δp [Pa]は、液柱の高さの差をh [m]、液体の密度をρ [kg m-3 ]、重力加速度をg [m s-2 ]とすると、以下の式で表される。∆ p = p – p 0 = ρgh
図1 液柱形圧力計(液柱差真空計)の概略図
さらに、液柱の高い方の圧力p 0 を無視できるくらい低くすることで、液柱の低い方の絶対圧力 p [Pa]を求めることができる。なお、ここで絶対圧力とは、絶対真空を0 Paとした時の絶対値のわかった圧力を意味している。産総研では、水銀を用いた光波干渉式標準圧力計 (U 字管内の水銀柱の高さの差を、白色光干渉を用いてレーザー測長することで、正確に圧力の絶対値を決めることができる装置)で1 kPa から113 kPa までの圧力真空標準を実現している 7) 。
(2)重錘形圧力天びん
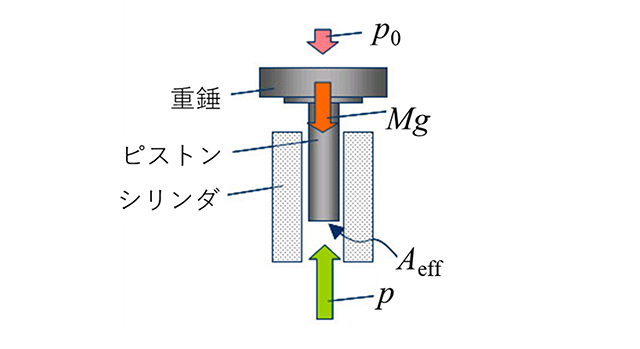
図2に圧力天びんの概略図を示す。圧力 [Pa]は、力F [N]を面積A [m2 ]で除した商(F/A )であると定義されるが、重錘形圧力天びんは、この定義をそのまま実現する方法である。力F はピストンと重錘の質量M [kg]と重力加速度g [m/s2 ]の積から求められる。ピストン・シリンダの有効断面積A eff [m2 ]は、形状測定から求める方法と、他の方法(液柱形圧力計など)で実現した圧力真空標準との比較から求める方法とがある。圧力天びんの外側をベルジャーで覆って真空排気し、圧力天びんの周囲圧力p 0 を無視できるくらい低くすることで、ピストン下部に絶対圧力p を発生できる。産総研では、重錘形圧力天びんを用いて、5 kPa から1 GPaの圧力標準を実現し、圧力天びんや高精度デジタル圧力計の校正サービスを実施している 8, 9) 。
図2 圧力天びんの概略図
(1)や(2)の方法は、圧力の定義そのものであり、再現性に優れ、大気圧付近では、非常に小さな不確かさ(~数 ppm)で圧力の絶対値を定めることも可能である。しかし、圧力が低くなってくると、(1)では液体の蒸気圧、(2)では圧力天びんの製作限界のため、圧力の発生が困難になってくる。そこで、(3)膨張法や(4)オリフィス法といった方法が用いられる。
(3)膨張法 10)
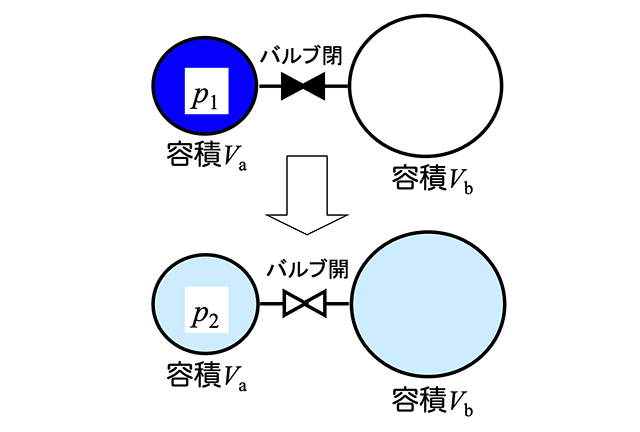
図3に膨張法の原理図を示す。膨張法は、気体の状態方程式を利用して、(1)や(2)で実現した圧力真空標準を、より低い圧力に拡張する方法である。バルブで連結された容積V a とV b の二つの真空容器があり、バルブを閉じた状態で、容積V a 内に圧力p 1 の気体を導入し、容積V b 内は真空排気する。次に、バルブを開けることで、容積V a 内の気体を膨張させる。温度を一定とすると、膨張後の圧力p 2 は、膨張比(容積比)V a /(V a +V b )と圧力p 1 の積に等しくなる。圧力p 1 を、(1)や(2)で実現した圧力真空標準を基準に測定することで、膨張後の圧力p 2 の絶対値を定めることができる。産総研では、膨張法を用いて10-4 Pa から2 kPa までの圧力真空標準を実現し、隔膜真空計やスピニングロータ真空計の校正サービスを行っている。
図3 膨張法の原理図
(4)オリフィス法 11 12)
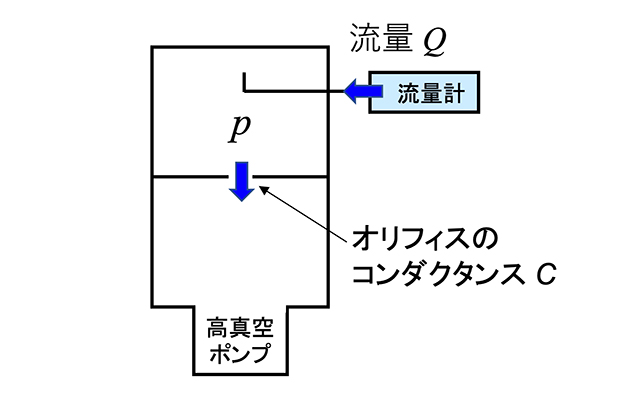
膨張法では、真空容器からのガス放出の影響が大きくなるために、10-4 Pa以下の標準圧力場の発生が困難になる。そこで、10-4 Pa以下の標準圧力場の発生には、オリフィス法(図4)が用いられる。オリフィス法とは、流量計を用いて、真空容器に流量Q [Pa m3 /s]の気体を導入し、コンダクタンスC [m3 /s]のオリフィスを介して排気することで、真空容器内の圧力p [Pa]をQ/C から求める方法である。コンダクタンスC は、オリフィスの形状から求めることができる。オリフィス法の一種であるが、分子流でコンダクタンスが一定になることを利用して、標準圧力場を発生する簡易的な方法もある 13) 。産総研では、これらの方法を用いて、10-9 Pa から10-4 Pa の圧力真空標準を実現し、電離真空計の校正サービスを行っている。
図4 オリフィス法の概略図
(5)分圧標準 14,15) とリーク標準 16, 17)
真空容器内の全圧だけでなく、分圧(混合気体中の特定成分の圧力)を測定することは、真空の質を診断する上で重要である。産総研では世界に先駆けて、分圧標準の確立に向けて取り組んでおり、分圧真空計(質量分析計)の校正サービスや、分圧真空計を“その場”で校正するための定量ガス導入素子“標準コンダクタンスエレメント”の校正サービスを行っている 14) 。標準コンダクタンスエレメントを用いることで、水蒸気を含む24種類のガスを用いて、分圧真空計の”その場”校正が可能であることを確認している 15) 。16) と、よりリーク量の大きいキャピラリー等を用いた標準リークを校正するための定容流量計(圧力変化法)17) を保有し、校正サービスを行っている。
発表文献
1) Bureau International des Poids et Mesures (BIPM), The International System of Units (SI) 9th edition (2019), https://www.bipm.org/en/publications/si-brochure
2) 国立研究開発法人産業技術総合研究所 計量標準総合センターホームページ, https://unit.aist.go.jp/nmij
3) 堂前 篤志, “我が国における計量標準とその供給体制(1)”, センサイトホームページ, https://sensait.jp/16955/
4) 国立研究開発法人産業技術総合研究所 計量標準総合センター 工学計測標準研究部門 圧力真空標準研究グループ ホームページhttps://unit.aist.go.jp/riem/pv-std/index.html
5) 日本真空学会 編, 真空科学ハンドブック 4.6 校正と標準, コロナ社, (2018) , p428-435.
6) 吉田 肇, J. Vac. Soc. Jpn., 56 (11), 2013, 449-456.
7) A. Ooiwa, M. Ueki and R. Kaneda: Metrologia, 30 (1994) 565.
8) 小畠時彦, 高圧力の科学と技術, 14 (2004) 184.
9) K. Kobata, M. Kojima and H. Kajikawa, Synthesiology, 4 (2011) 209.
10) Yoshinori Takei, Hajime Yoshida, Eiichi Komatsu, Kenta Arai, Vacuum 187 (2021) 110034.
11) K. Arai,H. Yoshida, M. Shiro, H. Akimichi andM.Hirata: Abstructs of the 4th Vacuum and Surface Sciences Conference of Asia and Australia (VASSCAA-4), Matsue (2008) p. 359.
12) H. Yoshida, M. Shiro, K. Arai, H. Akimichi and M. Hirata, Vacuum, 84 (2010) 277.
13) H. Yoshida, M. Hirata, H. Akimichi, Vacuum 86 (2011) 226-231.
14) Hajime Yoshida, Kenta Arai, Masahiro Hirata, Hitoshi Akimichi, Vacuum 86 (2012) 838-842.
15) Hajime Yoshida, and Kenta Arai, J. Vac. Sci. Technol. A 36, 031604 (2018).
16) K. Arai, H. Akimichi and M. Hirata, J. Vac. Soc. Jpn., 53 (2010) 614.
17) Kenta Arai and Hajime Yoshida, Metrologia 51 (2014) 522–527.
次回に続く-
【著者紹介】 吉田 肇(よしだ はじめ)
■略歴
この文章は、センサイト協議会が東京電子株式会社殿にインタビューした内容を記事にしてあります。
東京電子株式会社
東京電子株式会社
1 はじめに
真空はその度合いによっていくつかの領域に分類される。低真空(大気~102)、中真空(~10-1 )、高真空(~10-5 )、超高真空(~10-8 )(単位はいずれPa)などがある。ここではさらに高度な真空である(10-8 ~)Paを実現する極高真空(XHV)に関する技術と応用について、この分野で特徴的な技術を有する東京電子(株)の製品を元に説明する。
2 極高真空用材料 0.2%BeCu
真空構造材と言えば通常ステンレス、あるいはチタンなどが使われているが、熱線(赤外線~可視光)の吸収率が非常に大きくまた熱が伝わりにくいため一旦熱が吸収されると、熱が逃げにくく、チャンバーやフランジなどの温度が上昇、ガス放出が大きくなり極高真空の実現は困難となる。そこで極高真空領域では構造材にベリリウム銅を採用、熱伝導率が高く、高温にならないためガス放出を抑えることに成功している。東京電子では0.2%BeCuを実現、極高真空で課題となっていた水素ガス放出率の低減を実現している。この0.2%BeCuは真空構造材に適するように機械加工、研磨工程、還元・脱ガス工程、バリア膜形成工程を経て製造されている。この素材は極高真空実現には不可欠な材料で、以下で説明される各種極高真空機器に多く使用されるようになっている。(図-1)
図-1 0.2%BeCu製品
3 極高真空向け真空計とポンプ技術
3.1 極高真空計 3B-Gauge
10-8 Pa以下(極高真空)の圧力を正確に測定するには、測りたい圧力より一桁以上低い圧力まで測定出来る測定子が必要である。測定限界値付近の誤差としては、測定子の感度変化(軟X線効果)、残留電流変動によって誤差が変動する場合ESDイオンとガス放出などがある。一般的に表示される圧力は実際よりも-10%あるいは-100%低く表示される。極高真空を実現するのは難しいのに、真空度が低めに表示されることは大きなトラブルにつながる恐れがある。この問題を電子回路で補正するには複雑なパラメータの変化を把握し、超微小電流(fA)を測定しなければならず極めて難しい問題と練っている。この問題に対応する最もシンプルな解決方法は残留電流の極めて小さい測定子を用いる事である。
図-2 3BーGauge
3.2 極高真空向けNEGポンプ マジックNEGポンプ
0.2%BeCu合金の真空容器に小型ニップルNEG(Non-Evaporable Getter)カートリッジを円筒状に挿入したポンプで、ケーシングに銅合金を採用しているため輻射熱は殆ど吸収されない。これによって温度上昇を防ぎ、省電力でNEGの活性を可能とした。これをマジック効果と称している。NEG素子はZr/V/Feの3元合金で数10ミクロンの粉末状をバインダーなしで固化・ピル状にし、このピルがガスを吸着する。このポンプはターボ分子ポンプや小型イオンポンプと組み合わされることで、大気圧から10-10 Paの極高真空を24時間以内に実現可能としている。
図-3 マジックNEGポンプとカートリッジ
次回に続く-