
先端データ企画部
部長 守屋 剛
4.半導体製造プロセスにおける最適化事例
半導体デバイスの微細化、および3次元化により、ターゲットとなる特性(カバレッジ、膜特性、均一性等)を同時に満たすプロセス条件の最適化が複雑化している。そのため、新規プロセス開発に時間がかかっており、機械学習を適用することによって開発効率向上が見込める。半導体製造プロセス開発においては、新規プロセス手法が考案された後、プロセス最適化とハードウェア最適化が検討される。ここで、プロセス最適化に機械学習を適用することで、プロセスコンセプトの検証と最適化を効率化する検討を行った。
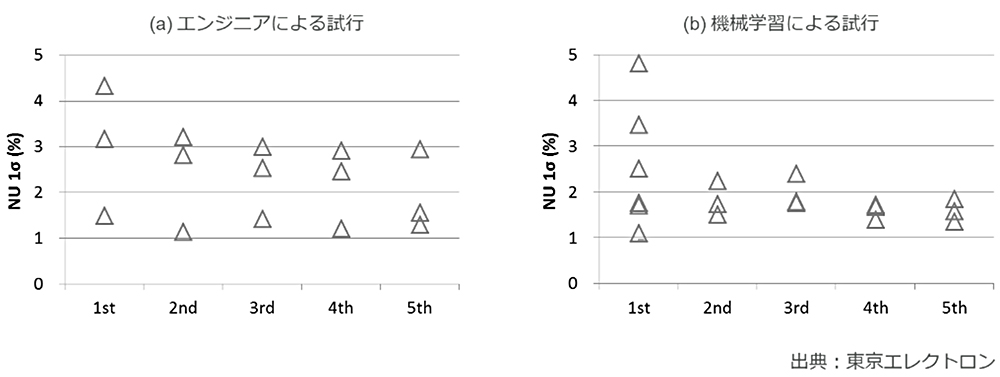
プラズマ原子層堆積法(Plasma Enhanced Atomic Layer Deposition:PEALD)における膜厚の不均一性の最適化に機械学習を適用した。説明変数としてプロセス調整パラメータを採用し、目的変数として膜厚の不均一性を使用して回帰モデルを作成した。制御モデル作成の実験フローは、目標の結果が得られるまで繰り返し実施した。機械学習により、PEALDの膜厚不均一性の調整を対象として検証した。膜厚の不均一性とはウェーハ面内での膜厚の1σを指し、できるだけゼロに近い値を達成することを目標として設定した。(PEALDの基本プロセス条件は参考文献 5)を参照)
プロセス最適化経験のあるエンジニアと機械学習アルゴリズムによる最適化を別々に実行した。ウェーハ面内のPEALD膜厚の不均一性は、人間(プロセス最適化経験のあるエンジニア)と機械学習の両方で別々に最適化された。エンジニアと機械学習アプローチによる各試行の結果を図4に示す。エンジニアは、5回の試行によって不均一性の変動を収束できていないが、機械学習アプローチでは変動を収束させることができた。これらの結果は、機械学習アプローチによって、最適条件を素早く見つけられることを示唆している。
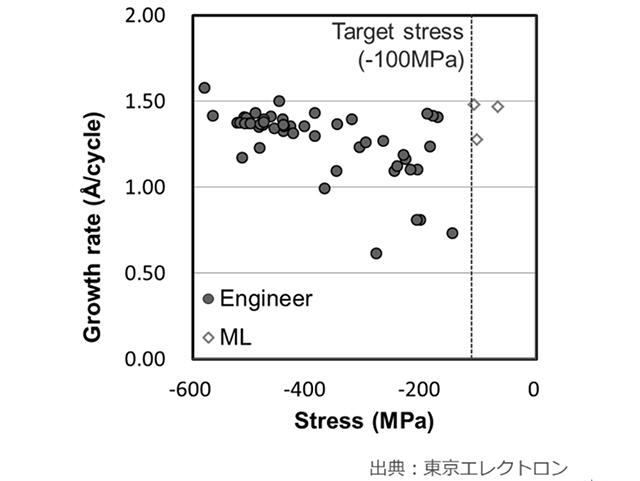
同様に、膜応力の最適化をエンジニアと機械学習の両方で実行した結果を図5に示す。エンジニア(●)は試行錯誤によって、プロセス条件の最適化を試みたが、最終的に-100~0MPaの目標を達成することはできなかった。対照的に、機械学習アプローチ(◇)によって作成された条件は、目標のストレス条件を満たすことができた。
ここで、エンジニアが試行錯誤によって取得したデータ(●)の範囲内にターゲットを満たすプロセス条件がなかったため、その他の目的で取得していた、全く違う成膜プロセスの実験結果を用いて、学習データを作成した。その結果、機械学習によって、求める条件(◇)を得ることができた。これは、異なる学習データセットを用いた転移学習によって、外挿領域における新たなプロセスウィンドウ探索に成功した好例であったといえる。
5.おわりに
半導体製造プロセスに機械学習を導入し、素早く目標を達成することができた。機械学習によるアプローチでは、新しいプロセスウィンドウの探索が可能になるため、未知の最適条件を見つけることができることが実証された。機械学習を介してパラメータの寄与率が提案されることで、調整パラメータの探索を人間の判断で実施することも可能になる。今後、機械学習がプロセス開発業務の補助ツールとして活用できることが期待される。
発表文献
5) S. Iwashita, T. Moriya, T. Kikuchi, M. Kagaya, N. Noro, T. Hasegawa and A. Uedono, J. Vac. Sci. Technol. A 36, 021515 (2018).
【著者紹介】
守屋 剛(もりや つよし)
東京エレクトロン株式会社
先端データ企画部 部長
■略歴
1997年 日本電気株式会社入社
2001年 東京エレクトロン株式会社入社、現在に至る
2005年9月 広島大学大学院工学研究科博士課程修了(工学博士)
2008年3月 英国国立ウェールズ大学経営大学院修士課程修了(MBA)
■著書
戦略的CSRのススメ(共著、日新報道社)
超LSI製造・試験装置ガイドブック2009年版(共著、工業調査会)
クリーンルームにおける瞬低対策事例と装置(共著、日本工業出版)
高齢化社会に対応した廃棄物処理システム構築の取り組みを開始
和歌山県橋本市とパナソニック(株)は、橋本市が抱えるごみ処理課題の解決を通じたさらなる地域活性化および市民サービスの向上に向けて相互に連携・協力していくことで合意し、連携協定を締結した。これに基づき、両者は共同で高齢化社会に対応した廃棄物処理システム構築の実証実験を行う。
日本の一般ごみの総排出量は4,274万トン(東京ドーム約115杯分)※1で、平成24年度以降微減傾向にある。しかし、ごみ処理にかかる年間費用は約2兆円と増加しており、地方公共団体の大きな負担になっている。加えて、高齢者のみの世帯が増加するにつれて、家庭からのごみ出しに課題を抱える事例も増加しており、一部の地方公共団体では高齢者のごみ出し支援(「ふれあい収集」等)が開始されている。この傾向は今後数十年にわたり続くものと見込まれており、高齢化社会に対応した廃棄物処理システム構築の必要性が高まっている。※2
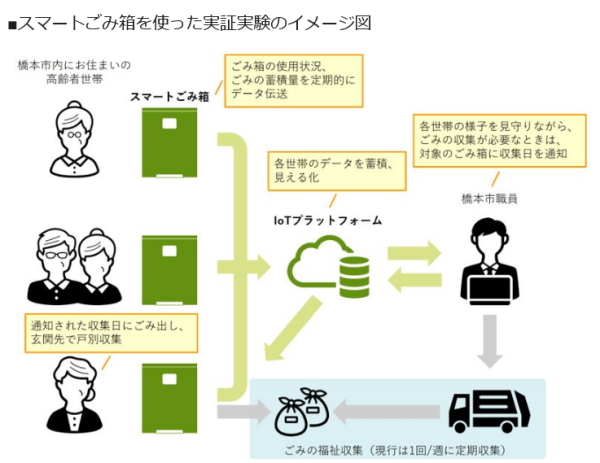
今回、橋本市とパナソニックが共同で行う実証実験は、無線でインターネットにつながる「スマートごみ箱」を新たに開発し、橋本市在住の高齢者世帯に設置して行う。ごみ箱にたまったごみの量を内蔵センサで検知してデータ化、クラウド上に蓄積したデータを活用して高齢者のごみ出し支援の効率化に関する課題や効果の検証、プライバシーに配慮した見守りサービスの検討を行う。なお、「スマートごみ箱」には、パナソニック独自のクリーンテクノロジー「ナノイー X」※3発生装置も取り付ける予定。
橋本市は、15年以上前から「生ごみ堆肥化・減量化運動」を推進し、ごみの減量に取り組むことでごみ処理にかかる経費を抑えるとともに、高齢者や障がいのある方、紙おむつ利用世帯を対象とした「ごみの福祉収集」を実施するなど、福祉の充実を図っている。
パナソニックは、これまでも「家庭用生ごみ処理機」を通じて、家庭から出る生ごみの減量や堆肥化によるかんたん快適なエコ生活を提案してきた。また、さまざまな製品に「ナノイー X」を搭載し、除菌や脱臭など暮らしにおける空気環境改善を提案している。
橋本市が提供するさまざまな公共サービスと、パナソニックが今まで培ってきた暮らしをさらに便利に快適にする技術力を連携させ、包摂的かつ持続可能な「住み続けられるまちづくり」を目指していくとしている。
■実証実験の検証内容
・ごみ収集頻度の削減量把握ならびにごみ処理費用とCO2放出量の削減効果
・ごみの収集頻度を下げるために必要とされる機能や課題
・家電による高齢者世帯の見守りに必要とされる機能や課題
なお、ソリューションの具体的な仕様やスケジュール、実行計画については、今後協議の上決定する。
■役割分担
【橋本市】
・協力者(高齢者世帯)の募集や事前説明などの実証実験準備
・「ごみの福祉収集」における実証実験の実施、運営(協力者宅からのごみ収集、収集日時の連絡など)
【パナソニック】
・スマートごみ箱の開発/提供
・IoTプラットフォームの構築およびデータ管理
・スマートごみ箱を活用した住民サービスの提案
※1 環境省「令和元年度における全国の一般廃棄物(ごみ及びし尿)の排出及び処理状況等の調査結果」(令和3年3月30日)
https://www.env.go.jp/press/109290.html
※2 環境省「高齢者のごみ出し支援制度導入の手引き」(令和3年3月発行)
https://www.env.go.jp/recycle/post_50.html
※3 「ナノイー X」は、空気中の水分に高電圧を加えることで生成されるナノサイズの微粒子イオンで、さまざまな物質に作用しやすいOHラジカル(高反応成分)を含む。
https://panasonic.jp/nanoe/
プレスリリースサイト(panasonic):
https://news.panasonic.com/jp/press/data/2021/07/jn210715-1/jn210715-1.html
素早く簡単に使える自律移動ロボット KeiganALI 7月16日限定発売開始

(株)Keiganは、2021年7月16日より自律移動ロボット(AMR※) KeiganALI (ケイガンアリ) の限定販売と出荷を開始する。
KeiganALIは人と一緒に働く自律移動ロボット。30kgまでの荷物を運ぶことができ、障害物もスムーズに回避する。
工場、物流倉庫、レストランなど、幅広いシーンで活躍する。
・使いやすさを追求
KeiganALIはタブレットやスマートフォンからアプリを利用して操作。マップ作成・ルートの設定から実際の運用まで、タッチ操作で素早く簡単に設定することができる。
・マップによる自動運転とライントレースに両対応
LiDAR(レーザースキャナー)と複数のセンサを搭載し、人や障害物を自動で避けながら荷物を運ぶ。
マップを使用して自動運転を行うだけでなく、カメラによるライントレース(床面のラインテープ追従)にも対応している。
・販売について
製造は国内提携工場で行い、販売は株式会社Keiganと国内代理店を通じて行う。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000009.000024338.html
Raspberry Piと組み合わせ、3Dセンシング・システムが手軽に開発できる「ILT開発キット」発売
マジックアイは、測定対象の位置計測に独自のアルゴリズム:ILT(Invertible Light Technology)を採用し、赤外線レーザー・プロジェクターとCMOSイメージセンサのシンプルな部品構成で、最大600fpsを超える高速でかつ応答性の高い3Dセンサを開発している。
この度、企業や大学・高専の研究室の研究者など幅広く3Dセンシングに興味を持つ方々を対象に、ILTが持つ高速、高精度、低遅延の3Dセンシング技術を、手軽に評価できるエントリーモデルの「ILT開発キット」を開発、2021年7月初旬に世界同時発売する。
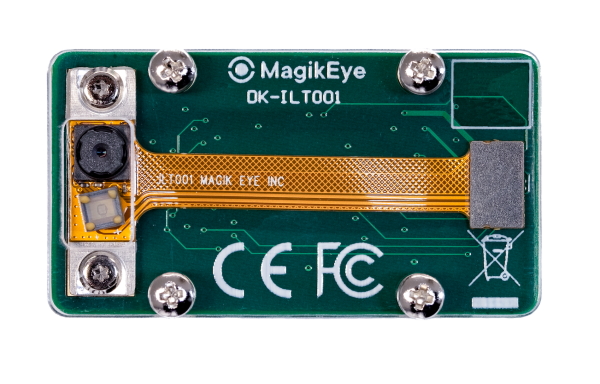
「ILT開発キット(製品名:DK-ILT001)」は小型・軽量(44(W) x 24(D) x 16(H)mm:16g)のハードウェアと専用のファームウェアから構成されており、手軽に早い動きのある立体を高精度に測距し、3Dポイントクラウドにすることができる。また、C++やPythonなどの開発言語に加え、OpenCV、PCL、Open3D、ROS、Unityなどのミドルウェアもサポートしているので、比較的安価で簡単に目的に応じた3Dセンシング・システムを構築することができるという。
■3Dセンサ開発キットの特長
1.高速、高精度、低遅延
最高約120fpsの高速な3Dセンシングが可能。動きの早い測定対象の3Dセンシングが高精度かつ低遅延で実現できる。
2.小型・軽量
44(W) x 24(D) x 16(H)mm、16gと小型で軽量。Raspberry Pi(各種)との組み合わせで、移動体をはじめ取り付け場所を選ばないコンパクトな3Dセンシング・システムの開発が可能となる。
3.利用しやすい開発環境
C++、Pythonなどの言語や、OpenCV、PCL、ROS、Unityなどの環境に対応したAPIを提供する。
手軽に開発キットの応用の可能性と性能を確認できる。
■製品仕様
・測距可能距離(弊社開発環境による)
・プロジェクター発光到達距離:1500mm
・弊社推奨測距距離:150〜800mm(測定精度±3¥%)
・高精度測距距離:150〜500mm(測定精度±1.5¥%)
・測距有効視野角(FOV):約55度×約43度(弊社開発環境による)
・測距速度:約120fps(弊社開発環境による)
・動作環境:Raspberry Pi Zero W/3B/3B+/4(専用ファームウェアを準備)
・レーザークラス:クラス1(IEC60825-1(2007)、FDA:2110463-000)
■その他諸元
・電源電圧:3.3V(電源はRaspberry Piのカメラコネクターより供給されます)
・消費電力:0.6W(平均)
・形状:44(W) x 24(D) x 16(H)mm
・質量:16g
■発売概要
・製品名:ILT開発キット
・型名:DK-ILT001
・希望小売価格:100ドル
・発売日:2021/07/15
・予定販売台数:5000台
・販売チャンネル:株式会社スイッチサイエンスより発売予定
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000006.000083311.html
IoTBASE、電源不要で約3年連続稼働するIoTカメラソリューションをリリース
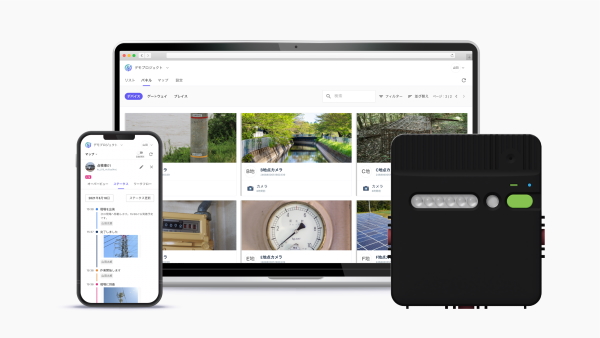
IoTBASE(株)は、 現場管理を支援するSaaS型クラウドサービス「Canvas」が、 新たに低消費電力IoTカメラに接続対応し、IoTカメラソリューションとして提供を開始した事を発表した。
■ 「IoTカメラソリューション」とは?
点検場所に低消費電力のIoTカメラを設置し、 現場の様子やメーターの値などの対象物を自動で撮影することで、目視巡回点検をリモート化する。遠隔から監視できることで、離れた場所にある点検場所や、高所などの危険場所など、これまで人が向かい確認してなければならなかった業務を効率化し、点検場所への移動時間の削減や、 現場作業の負荷軽減を実現するという。
<ソリューションの特長>
1. 電源不要で約3年間連続稼働
1日3回撮影で約3年連続動作するLTE搭載IoTカメラ※1により、 電源・ネットワーク工事不要で目視による巡回点検を簡単にリモート化できる。
2. 大掛かりな設備投資が不要
IoT導入時に課題となりやすい、 大掛かりな設備投資や設備を止めるような設置工事は一切不要。 目視点検を行っている場所にIoTカメラを設置するだけで遠隔監視が実現する。
3. 離れた場所から集中監視
IoTカメラから取得したデータは、 インターネット経由でクラウドに送信されるため、 離れた場所にいても撮影した写真をパネルやマップなど様々な画面で確認することができる。
※1 撮影頻度や設置環境、 撮影解像度などによって連続動作時間は変動する。
<利用シーン>
電源不要で3年間連続稼働でき、 防水防塵対応もしているため様々なシーンで活用できる。
■「Canvas」について
IoTBASEが提供する「Canvas」は、 現場のさまざまなセンサ情報を統合管理するIoTデータダッシュボードサービス。 センサから取得したIoTデータ、 作業ステータス、 撮影した写真などのデータをクラウド上で一元管理することで、 これまで人が向かい確認しなければならなかった業務を削減し、 現場業務の生産性向上をサポートするとのこと。
<サービスの特徴>
・10種類以上のセンサを1つの画面で統合管理
・直感的な操作で通知やワークフローもかんたん設定
・初期のシステム開発不要でスモールスタートできる
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000037.000022569.html
105°Cまで動作温度保証。初のデュアル(DR、GNSS)出力自動車用推測航法モジュール

スイスのu-blox AG(日本法人:ユーブロックスジャパン(株))は、最高105°Cで動作可能な車載グレードの測位モジュール・シリーズを発表した。NEO-M9Lモジュール(*1)およびM9140-KA-DRチップは、堅牢なu-blox M9 GNSSプラットフォーム上に構築されており、衛星信号が不正アクセスされた場合や受信できない場合でも、推測航法技術を使用して高精度な位置データを提供するという。
u-blox NEO-M9L-20AおよびNEO-M9L-01Aモジュール、ならびにM9140-KA-DRチップは、初期搭載の車載ソリューション向けに設計されている。これらのモジュールとチップはすべて車載グレードであり、なかでもNEO-M9L-01Aは最高105°Cの拡張動作温度範囲を提供し、ルーフの上やフロントガラスの内側、高温になる電子制御ユニット(ECU)内部への搭載に適している。アプリケーションには、車載インフォテインメント(IVI)やヘッドユニットなどの統合ナビゲーション・システム、統合テレマティクス制御ユニット(TCU)、V2Xなどがある。
これらのモジュールは、低遅延の100Hz RAWデータ出力を提供する新世代の6軸慣性測定ユニット(IMU)を搭載している。また、低遅延50Hzの位置情報更新レートを提供するため、リアルタイムのアプリケーションでの使用に最適。自動車用推測航法(ADR)は、最新のGNSS測位とIMUのデータをスマートに組み合わせて、任意のシナリオに応じた最も高精度な測位情報を出力する。追加のGNSSのみの出力により、さまざまなサードパーティ・アプリケーションへのシームレスな統合が可能。レシーバーはウェイクオンモーションもサポートしており、盗難防止や電力効率の高い設計などのスマート機能を実現する。
モジュールのすべてのバリエーションは、車載アプリケーションに使用されるモジュールの信頼性を確保するための最新の規格であるAEC-Q104に準拠している。エンジニアリング・サンプル(ES)と評価キットは、2021年9月末までに提供開始予定。事前注文については、最寄りのユーブロックス(*2)にお問い合わせのこと。
*1: https://www.u-blox.com/en/product/neo-m9l-module
*2: https://www.u-blox.com/en/about-us/sales-network-offices
ニュースリリースサイト:https://www.dreamnews.jp/press/0000237040/
ストラドビジョンとビューロン・テクノロジー、韓国の物体認識テクノロジー企業が『センサーフュージョン』で提携
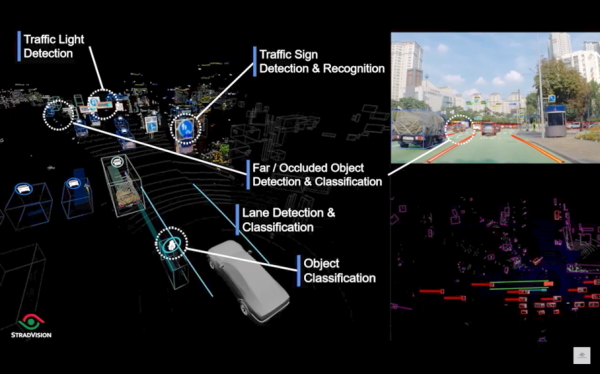
先進運転支援システム(ADAS)や、自動運転車両向けの物体認識AIソフトウェア『SVNet』を提供するStradVision, Inc.は2021年7月13日、LiDAR用知覚ソフトウェアおよび自律走行技術を提供するVueron Technology Co. Ltd.との提携により、従来技術に比べて大幅に精度が向上した物体認識技術『センサーフュージョン』の導入を発表した。
『センサーフュージョン』は、物体の形や色などのさまざまな情報を認識できるカメラの汎用性と、物体までの距離を数ミリ以内の誤差で測定できるLiDARの精度を組み合わせた技術。
この新技術は、ストラドビジョンのAIベースのカメラ知覚ソフトウェア『SVNet』と、ビューロン・テクノロジーのLiDARベースの知覚ソリューション『View.One』によって実現される。カメラで収集した物体の画像データと、LiDARで描画した3次元点群を統合することで、既存の単一センサーによるソリューションよりも高精度に周囲の環境を認識する。
今回の提携により、『センサーフュージョン』の技術を世界の自動車業界に提供していく予定。カメラの強みである物体の分類や車線検出と、LiDARの強みである物体位置認識や速度予測を組み合わせ、次世代の自動車業界に貢献するとしている。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000010.000072834.html
RISC-V Vector Extensionを実装したプロセッサとしてISO 26262 ASIL D Ready認証を取得
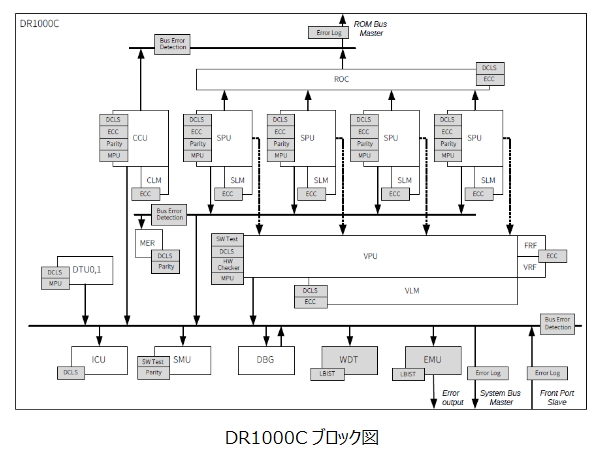
(株)エヌエスアイテクス(以下「NSITEXE」)が開発するDFP(Data Flow Processor)「DR1000C」が、SGS-TÜVのISO 26262 ASIL D Ready認証を取得しました。RISC-V Vector Extensionを実装したプロセッサとして、ISO 26262 ASIL D Readyの認証を受けるのは、世界初*になるという。
DR1000Cは、セーフティクリティカルシステムをターゲットとした車両制御マイコンに求められる高負荷演算処理(モデル予測制御やAI推論、センサー処理等)をオフロードするのに最適な並列プロセッサIP。最大16個のハードウエアスレッドがベクトルプロセッサを効率的に使用することで非常に高い電力性能を実現している。DR1000Cは車両制御に適しているだけでなく、FA等の産業機器、RADAR等のセンサ処理など、様々な組込み領域のアプリケーションへの応用が可能である。
DR1000Cには、メモリの誤り訂正コード(ECC)やプロセッサ部のデュアルコアロックステップ機構、バスのプロトコル診断機能、自己診断用のエラー注入及び各エラーのホストへのレポートやステータスを管理するエラーマネジメントユニットなどハードウエアランダム故障を検出する機能が統合され、外部に特殊な安全機構を追加せずにASIL Dの安全要求を達成することが可能である。高い性能の核となるベクトルプロセッサ部は実行するアプリケーションの性能要求とASILによってロックステップ診断とソフトウエア診断を切り替えて使用でき、あらゆるユースケースへの対応が可能な汎用性の高い仕様となっている。
ロックステップ診断を使用することでASIL D基準、今後リリース予定のソフトウエア診断ライブラリと組合せることでベクトルプロセッサの演算能力をフルに活用しながらASIL C基準を達成することが可能となる。
同じくASIL D準拠で開発中のDR1000C-SDK(Software Development Kit)が提供する安全で正確なスレッド制御やメモリ保護・時間保護機能及びISO 26262に準拠したツールチェーンを活用することで、ユーザーはアプリケーション開発に専念することができ、開発期間を短縮することができる。SDKに含まれるスレッド制御ソフトウエアにはリアルタイムタスクの優先実行やスレッド実行監視などセーフティクリティカルシステムで必要な様々な機能が備わっている。
DR1000C-HSK(Hardware Safety Kit)では、故障モード影響診断解析(FMEDA)、セーフティマニュアル、セーフティケースレポート及びISO 26262関連のドキュメントを提供し、車両制御マイコンの機能安全性解析と認証取得の期間を短縮できる。またDR1000CはISO 9001品質マネジメントシステムに基づいて開発されており、厳しい車載品質へも対応しているとのこと。
* 2021年6月30日現在、エヌエスアイテクス調べ
ニュースリリースサイト(nsitexe):
https://prtimes.jp/a/?f=d82721-20210712-c59d36f61bfa2176f4ac2e19fb8aa487.pdf
東朋テクノロジー、ドローン技術やセンサ技術を保有するスタートアップ企業との事業共創の募集

東朋テクノロジー(株)は、ドローンを活用した新規事業を共創できるスタートアップ企業の募集を開始した。
今回のスタートアップ企業との事業共創の募集は、同社が参加している、名古屋市主催「NAGOYA Movement」を通じて実施している。
募集テーマ①:水中ドローンによる水中点検・検査業務の効率化
顧客の課題と解決策
ダム点検を例にすると、従来ダイバーに外注して実施してきた水中探傷検査業務は、複数のダイバーによる丸1日の点検で、1回の調査に高額な費用がかかっていた。
そこで、解決策として、水中ドローンにセンサを組み込むカスタマイズを施すことで、水中点検サービスの提供を目指す。
水中ドローンで点検業務を行えるようになれば、コストも大幅に削減できるほか、点検業務の一連のサービスを一括で提供できるようになる。
募集技術
上記の内容での協業募集に伴い、以下のような技術を保有しているスタートアップ企業を募集している。
1.水中ドローンのハードウェア
2.センサ技術(超音波、赤外線など)
3.コンクリート探傷のノウハウ
募集テーマ②:ドローンによる空中巡視・点検業務の効率化
顧客の課題と解決策
高所などの危険な箇所や、直接目視ができない設備の点検は難易度が高く、精度の高い検査を実施することは難しい場合がある。
そこで、ドローンにカメラやセンサを組み込むカスタマイズを施すことで、高所を中心とした目視が難しい設備の外観検査や点検サービスの提供を目指す。
巡視や調査・検査のニーズに合ったセンサなどを組み込むことで、それぞれの環境下で最適な点検業務が実施できるモデルを提供する。
募集技術
上記の内容での協業募集に伴い、以下のような技術を保有しているスタートアップ企業を募集。
1.ドローンのハードウェア
2.センサ技術(赤外線、超音波、ガス、蒸気など)
3.高性能カメラ技術
4.画像検知・処理技術
5.ドローン自動運転システム
・募集概要・申し込みページ
https://nagoyamovement.jp/company/toho-tec2.html
・NAGOYA Movement公式HP
https://nagoyamovement.jp/
東大発AIベンチャー、運搬業務を完全無人化、牽引式の自動搬送ロボットを開発
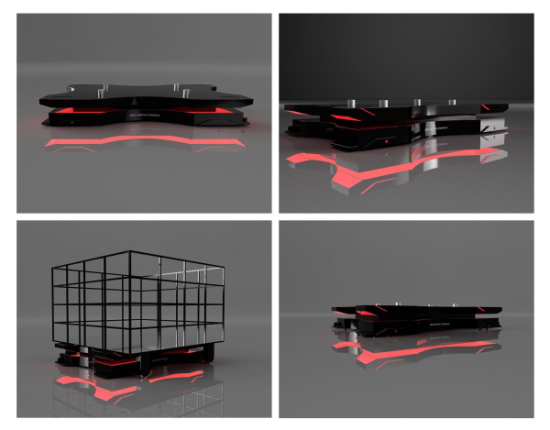
TRUST SMITH(株)は、牽引式の自動搬送ロボット(以下AGV)を開発した。本技術により、製造・物流現場における人手不足の解消、運搬業務の効率化、作業者の負担軽減に貢献する。
●牽引式AGV 概要
TRUST SMITHは今回リフト式AGVに続き、牽引式AGVを開発した。本AGVは、カゴ台車の下に潜り込み、台車ごと牽引することで運搬の完全無人化を実現する。
・床への装飾が不要
これまでの磁気誘導式やグリッド式のAGVとは異なり、床への装飾が必要ないため、工場のレイアウト変更に柔軟な対応ができる。
・あらゆる大きさ・形状・重量に対応可能
写真の機体での想定ユースケースは、約1m四方のカゴ台車を運搬することだが、ユースケースに合わせてハードウェア (機体本体) の設計、ソフトウェアの設計など全てオーダーメイドで開発可能である。
●技術について
TRUST SMITHはこれまで自動運転の研究開発による物体認識技術、アームロボットによる障害物回避アルゴリズム(特許取得済み)などを培ってきた。本AGVはそれらの技術を活かしており、具体的には以下のような特徴を持つ。
①自律走行
センサから取得した情報を元に自身で地図を生成する。自己位置を常に把握しており、指示もしくはシステムとして事前に登録することで、目的地までの最適な経路を生成する。
②障害物回避
床に段差や障害物がある場合はセンサーで検知し、自ら判断して避けることが可能。
人が歩いている空間においても運搬業務を行うことができ、「人と協働するロボット」としてデザインされている。
●開発の背景
近年、製造・物流現場では人手不足が深刻な問題となっている。品質検査や仕分けの自動化などは進んでいるものの、運搬作業は未だに人手に頼っている現場が多く、作業者の負担は軽減されない一方である。
そこでTRUST SMITHは牽引式AGVを開発した。本技術により運搬業務を完全無人化を実現し、製造・物流現場における人手不足の解消、運搬業務の効率化、作業者の負担軽減に貢献する。
●今後の展望
今後は、現在開発済みのリフト式AGV、牽引式AGVをあらゆるクライアントの環境に合わせて導入するとともに、コンベアタイプやアーム付きタイプの機体開発にも着手する予定である。
また、群制御システムや、アームロボット、AGF、WMS、FMSなどあらゆる機器やシステムと連携することで次世代工場・倉庫の実現に向けて、今後さらに研究開発に力を入れていくという。
ニュースリリースサイト(trustsmith):https://www.trustsmith.net/2021/07/10/