NRIデジタル(株)は、企業が顧客接点で進めるOMO(Online Merges with Offline:オンラインとオフラインの融合)の設計と実行を包括的に支援するサービス「OMO OnBoard」(オーエムオー・オンボード、以下「本サービス」)の提供を9月7日開始した。
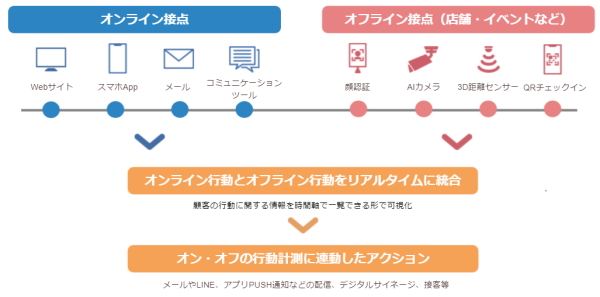
本サービスは、Webサイトやスマホアプリ等、顧客との「オンライン接点」で取得した情報と、リアル店舗や展示会等に設置したAIカメラ、3D距離センサー、QRチェックインなどの「オフライン接点」で取得した情報を統合し、顧客の行動に関する情報を可視化する。
さらに、オンライン・オフラインの行動計測に連動したリアルタイムのアクション(メールやLINEの配信、デジタルサイネージ、接客等)を企業が行うことを支援する(画像参照)。なお、本サービスは、個人情報の保護およびセキュリティに十分に配慮をした上で展開をしていくという。
OMOサービスの設計から実行までをスピーディーに実現
本サービスは、NRIデジタルがこれまでにさまざまな企業において、OMOの推進を支援する中で得た知見・ノウハウを生かして開発したもの。
オフライン接点における行動計測には、3D LiDAR (TOF ※1)センサ(日立エルジーデータストレージ社の3D距離センサ)やAWL Pad(AWL社のAI顔認証システム)を活用している。QRコードによるチェックイン(入店・入場確認)と混雑可視化システムはNRIデジタルで開発した。オンラインおよびオフラインの行動をリアルタイムに統合するにあたっては、Google CloudTM ※2(Google 社のエンタープライズ向けクラウド プラットフォーム サービス)を、行動計測に連動したアクションの実行はKARTE(プレイド社のCXプラットフォーム)を活用している。
本サービスを利用することにより、企業は、顧客接点におけるオンラインとオフラインの情報を融合させた、質の高い顧客体験を提供する仕組みの設計から実行までを、1~3カ月で実現できるとのこと。
SaaSインテグレーションサービスを今後も拡張
本サービスは、NRIデジタルが企業に対し、先進的なSaaSを適切な組み合わせで短期間に導入できるように開発・提供してきたSaaSインテグレーションサービス「D2C OnBoard」(D2Cビジネス立ち上げ・改善支援サービス)、「C4M OnBoard with KARTE」(顧客データプラットフォーム構築・運用立ち上げ支援サービス)に次ぐ、新サービス。NRIデジタルでは、今後も、企業のDX推進を支援するサービスメニューを拡張していくとしている。
※1 TOFは、Time Of Flight の略称で、光の飛行時間を測ることで三次元的な情報を計測する技術。
※2 Google Cloud は Google LLC の商標。
ニュースリリースサイト(NRI-digital):https://www.nri-digital.jp/news/20210907-5986/