
准教授 辻 俊明
4.耐故障計測の原理と実証試験
本節では前節で述べた対策2の方法について述べる。上述の通り、力覚センサは3軸のものと6軸のものが一般的に利用されているが、力の検出に用いられるデバイスのチャンネル数は冗長な構成になっていることが多い。したがって、一つのチャンネルに故障が発生しても、他のチャンネルが正しい値を提示していれば故障を診断し、補償出力を導出することができる。
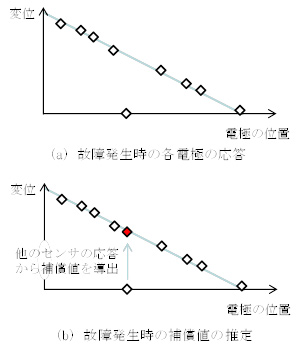
そのアルゴリズムを以下に説明する。数学的に厳密な説明は避け、図を用いた概念的な説明とするが、詳細は文献4)を参照されたい。複数の電極を配置したセンサを想定し、そのうちの一枚の電極が故障した場合に各電極が示す変位の値をグラフで示したものを図3(a)に示す。故障したセンサの応答値のみ他の応答値から明らかに外れていることが確認できる。冗長なチャンネル数で検知をした場合には、それぞれのチャンネルの応答には相関性があり、故障が発生したチャンネルのみ、その相関的関係から外れた値を示すことになる。
また図3(b)のように、明らかに外れているチャンネルが示すべき応答値も他のチャンネルの応答値から推定することができる。したがって、以下の手順で処理することによって、故障が発生した場合にも故障診断を行い、値を補償して出力し続けることが可能になる。
・相関性を崩しているチャンネルを特定し、故障の可否を判断する
・故障しているチャンネルの値を他のチャンネルの応答に基づき推定し補償出力とする
・補償出力を用いて故障していないときと同様に力を計算する
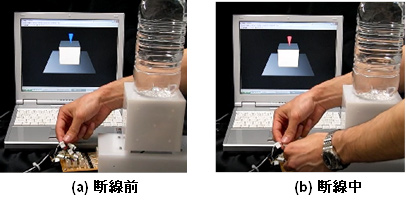
上記のアルゴリズムを実装した試験の様子を以下に記す。まず、原理的検証を歪ゲージ型の力覚センサで行った時の様子を図4に示す。9枚の歪ゲージの応答値を9チャンネルのAD変換機で計測し、その値から外力値を計算し、PCのディスプレイに可視化してCGで表示している。9チャンネルのうちの一つを断線すると、故障の発生したチャンネルを特定し、その値を補償することで右の図に示すように故障中も誤差の少ない計測値を示していることがわかる。
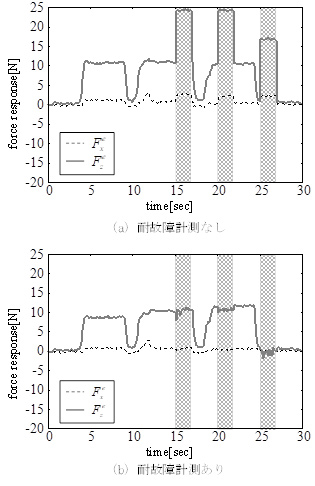
耐故障計測アルゴリズムなしで計算した場合とそのアルゴリズムを入れた場合の応答値を同じ実験結果から導出し、比較したものを図5に示す。灰色の領域で示されている時間帯に断線が発生しているが、その間も耐故障計測アルゴリズムを実装した場合には値の変動が抑制されている。
5. まとめ
力学的に人を支援するロボットが広く実用化されるためには力覚センシングの信頼性を高める安全技術が必須である。そこで、筆者のグループでは壊れにくい力覚センサを開発した。力覚センサの信頼性が高まれば人間支援ロボットの安全性の抜本的改善が期待される。故障リスクがネックとなっている協働ロボットの技術をさらに発展させるためには力覚センサの信頼性を高める試みを引き続き進める必要がある。
参考文献
*4) Toshiaki Tsuji, Ryosuke Hanyu: “Fault Tolerance Measurement Using a Six-Axis Force/Torque Sensing System with Redundancy, ” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2010), pp. 1890-1895, 2010.
【著者略歴】
辻 俊明(つじ としあき)
1978年7月9日生。2006年3月慶應義塾大学大学院理工学研究科総合デザイン工学
専攻後期博士課程修了。
同年4月 東京理科大学工学部第一部機械工学科嘱託助手。
2007年4月埼玉大学工学部電気電子システム工学科助教。
2009 年10月から2015年3月までJSTさきがけ研究員を兼任。
2012 年3月より埼玉大学工学部電気電子システム工学科准 教授、現在に至る。
2018年度,2019年度日本ロボット学会理事。再生医療とリハビリテーション学会
理事。博士 (工学)。
2006年度,2007年度ファナックFAロボット財団論文賞等を受賞。主として力覚センシングとその信号 処理に関する研究に従事しており、リハビリ支援ロボット,モーションコントロール技術に応用している