
准教授 辻 俊明
3.力覚センサの最大のリスク
力覚センサは人とロボットの協働における力学的インタラクションを処理することを主目的として実装されることが多い。そればかりでなく、適切な力指令値を与えれば力制御によって過剰な力が人にかかることを避けられるため、安全性の面でも力覚検知および力制御は必須である。
「人の痛みを理解する」能力がロボットには必要だと言い換えてもよい。しかし、必ずしも力覚センサの市場は現時点では大きくない。その主要因は力覚センサの故障リスクにあることがしばしば指摘されている。力覚センサはその特性上作業時の負荷を常に受けているが、負荷が過剰になった際にデバイスの破損や断線に起因して正しい値を提示しなくなることがある。
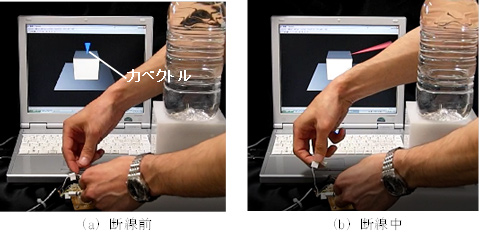
図2にそれを模擬した例を示す。右の力覚センサにペットボトルを載せると、その重力が検知され、左のディスプレイに矢印として表示される(図2(a))。この状態でセンサの導線のうちの一本を断線させると力覚センサは正しい値を検出しなくなる(図2(b))。力制御を実装したロボットでは、力センサの値をロボットの制御入力に反映させているため、力覚センサの故障はロボットの暴走を引き起こす。位置計測のセンサが故障した場合も当然暴走する恐れがあるが、位置計測のセンサは機構上衝突によって破損することがあまりない。そのため、衝突等の過負荷により力覚センサが故障し、暴走するリスクが人間支援ロボット実用化の最も強いネックになっている。
故障のリスクを避けるには主に以下の3つの対策が考えられる
対策1:力覚センサの機械的設計による破損の回避
対策2:力覚センサの耐故障計測アルゴリズムによる補償出力
対策3:コントローラやオブザーバへの耐故障制御の実装
次週に続く―
【著者略歴】
辻 俊明(つじ としあき)
1978年7月9日生。2006年3月慶應義塾大学大学院理工学研究科総合デザイン工学
専攻後期博士課程修了。
同年4月 東京理科大学工学部第一部機械工学科嘱託助手。
2007年4月埼玉大学工学部電気電子システム工学科助教。
2009 年10月から2015年3月までJSTさきがけ研究員を兼任。
2012 年3月より埼玉大学工学部電気電子システム工学科准 教授、現在に至る。
2018年度,2019年度日本ロボット学会理事。再生医療とリハビリテーション学会
理事。博士 (工学)。
2006年度,2007年度ファナックFAロボット財団論文賞等を受賞。主として力覚センシングとその信号 処理に関する研究に従事しており、リハビリ支援ロボット,モーションコントロール技術に応用している