
情報理工学部 教授
野間 春生
5. MEMS触覚センサによるヒトの触覚の再現
5.1. ステージモデルによる物体識別の学習
従来の触覚モデルは、閾値の実験結果に基づいて図10(a)に示すように4種類の触覚受容器から得られる個別の機械受容器からの出力を重ね合わせることで触覚を再現する考え方が主流である。この仮説に基づく触覚モデルに対して、触覚心理学研究の原点であるカッツは、感覚要素と特定の概念を組み合わせて感覚知覚ができると考えた[1]。カッツに続く一連の研究の成果として、物体の表面を触ったときの感触である”表面触”を構成する感覚の軸として、”硬い−軟らか”、”粗い-細かい”、さらに”粘−滑”が、三つの主たる触知覚的属性であるとの仮説があり、それぞれの触知覚的属性が物体の”弾性コンプライアンス”、”振動力”、”摩擦”の各物理的特性と高い相関が示されている[2]。
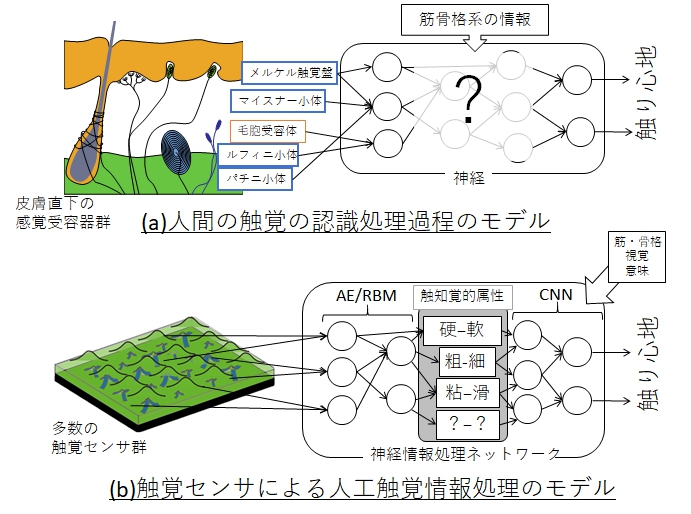
我々はこの触知覚的属性の考えに基づいて図10(b)に示すように機械触覚をモデル化し、神経ネットワークの中間出力として触知覚的属性を組み込むステージモデルにならった人工触覚情報処理を提案している。中間出力前半は、複数のセンサからの出力を入力として機械学習の一種であるAuto Encoder (AE)の仕組みを導入し、後半は通常のDeep Neural Network (DNN)を導入している。前半のAEは教師信号無しのNeural network(NN)の一種である。AEは多次元の入力信号の次元削減を実現するが、その際のネットワークの学習においては教師信号を用いず、入力信号を再現するアルゴリズムによって学習を進める。この部分は、ヒトにおいては皮膚触覚の末端である機械受容器から神経系を上って大脳に至る経路の前半に相当し、この部分では典型的な学習よりも神経ネットワークによる情報削減の仕組みが現実的であると考えたためである。一方、機械学習の後半では、AEの出力である中間出力を入力として、素材に関する情報を出力とする。教師信号はセンサで触れた素材についての情報とし、典型的なDNN構造での学習を進める。この部分は、ヒトにおいて視覚などの他感覚や記憶による継続的な学習の成果として物体の識別や複雑かつ豊かな感触を出力するモデルを仮定した。
5.2. ステージモデルによる対象識別
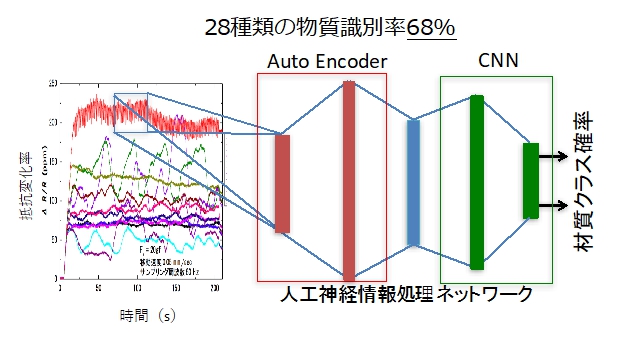
このステージモデルの実証のために、対象物の表面なぞりの結果から対象物を区別するタスクを設定した。まずMEMS 触覚センサを用いて収集された、上質紙やデニム生地、ダンボールや発泡スチロールなど計28種類の素材を対象として、触覚センサによって表面をなぞった際の計測データを収集した。ステージモデルでは複数のカンチレバーを有する触覚センサを想定しているが、ここで得られたデータは単一のカンチレバーで得られた信号であり、時系列に並ぶ一定時間の計測結果を複数のカンチレバーから得られた信号として見なして学習用のデータセットを作成した。
まず提案する触覚モデルの優位性を確認するために、簡易化させたConvolution Neural Network(CNN) モデルのみを用いた材質の識別を行った。このCNN モデルを用いた材質識別では 98 %の識別を達成し、センサデータには対象物を特定し得るだけの情報が含まれていることがわかった。この結果を指標として、図11に示す質感評価や触り心地といった表現をできるような人工触覚のためのステージモデルを作成した。
まず前半のAE部分のみを自身の信号だけを用いて学習を進め、十分に次元削減を行う。エンコーダとして、入力層と5 層の畳み込み層及びmax pool 層デコーダとして、出力層と 6 層の畳み込み層及び5層のup sample層、また、特徴量として用いる中間層の全 24 層からなっており、ネットワークの重みを入力データと出力データのユークリット距離とした誤差逆伝播法 を用いて学習を行った。ここでは入力のデータセットは1024次元、出力は32次元であった。この特徴量を元に、CNN を用いた解析を行い、結果として 68 %程度の識別が可能となった。先のCNNのみのモデルに比べれば識別率は大きく低下したが、前半のAEの部分では教師信号によって学習していないことを考えれば、触覚認知モデルの構造において、ニューラルネットワークの有用性を示すことができたと考えられる。今後、学習のための重み付けや層の構造、またデータ構造などを改良することで、より高度な人工触覚モデルの構築を目指す。
次週に続く-
謝辞
本稿のMEMSに関する図面は共同研究者である新潟大学寒川雅之准教授から提供を受けた。
参考文献
[1] カッツ(著)、東山ら(訳)、触覚の世界、新曜社、2003.
[2] 東山、体と手がつくる知覚世界、勁草書房、2012.
【著者略歴】
野間 春生(のま はるお)
立命館大学 情報理工学部 情報理工学科 実世界情報コース
メディアエクスペリエンスデザイン研究室
1994年3月 筑波大学大学院 博士課程 工学研究科構造工学専攻修了 博士(工学)取得
1994年4月 株式会社国際電気通信基礎技術研究所 入社
2012年12月 株式会社国際電気通信基礎技術研究所 退社
2013年1―3月 Worcester Polytechnic Institute 客員研究員
2013年4月 立命館大学 情報理工学部 教授
学会役職
日本バーチャルリアリティ学会 理事(2019年−)
専門分野・研究テーマ
バーチャルリアリティ、触覚インタフェース、ウェアラブル&ユビキタスインタフェース