
生産電子情報システム技術科
職業能力開発教授
寺内 越三
1.はじめに
九州職業能力開発大学校は2005年から海中ロボットの開発に取り組んでいる。はじめはOBE(海底電位差計)の姿勢監視用海中ロボットの開発1)に取り組み、2009年からは水中ロボットコンペティションへの出場に向けた競技用AUV(自律型海中ロボット)の開発2)に、2014年からは沖縄海洋ロボットコンペティション(以下、「沖縄海洋ロボコン」という。)への出場に向けた競技用AUVの開発3)に取り組んできた。
海中ロボットの開発は大学校4年次の開発課題実習において行われ、生産機械システム技術科、生産電気システム技術科、生産電子情報システム技術科の3科から、4から7名の学生が集い、3科の教員の指導の下、1年間かけてロボットの設計・製作・評価に取り組む(図1)。
筆者の赴任後2020年からは、地元マリーナや海洋環境団体と共に海中ロボットの開発に取り組みながら、自律航行システムや超音波ピンガー検出システムなどの海中ロボット技術の評価を目的に、水中ロボット競技会や沖縄海洋ロボコンに出場してきた。
本稿では、近年開発に取り組んでいる「船底点検ロボット」や「海洋ごみ運搬ロボット」と、筆者が担う沖縄海洋ロボコンの広報活動について紹介する。

2.船底点検ロボットの開発
2020年から3年間、船底点検ロボットの開発に取り組んだ。
北九州市の新門司マリーナは、ヨットやボートの保管や修理を行っている。海上に係留保管されるボートの船底や取水口に貝類などが付着すると、航行スピードの低下を招く。また航行時には船底が損傷したり、プロペラが破損したり、エンジン負荷が発生したりすることがある。船底を点検するためにはクレーンによる上架やダイバーによる潜水が必要となるが、ボートの上架やダイバーの依頼にはコストが掛かり、即座に対応することができない場合もある。容易に使用できる点検機器があれば、利用者のトラブルに即座に初期対応できる。
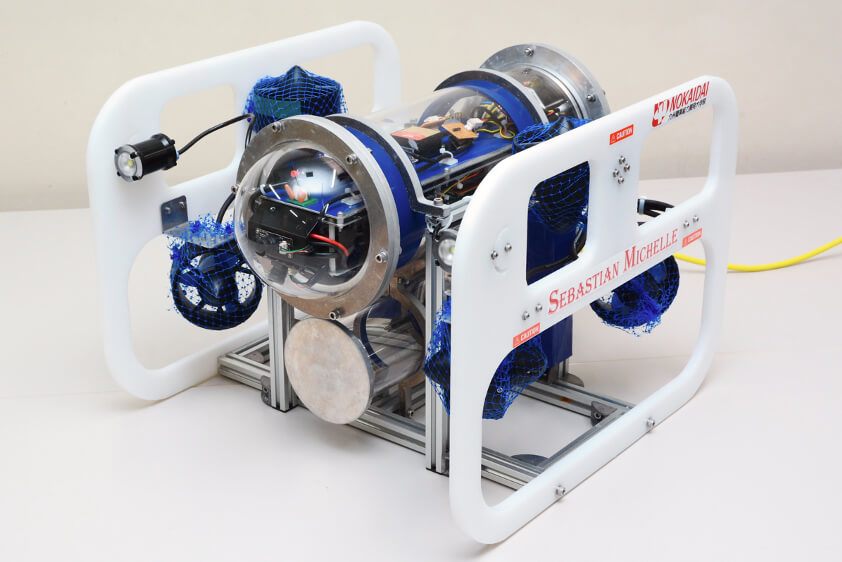
そこで本課題では、海洋レジャーの安全と振興、およびマリーナサービスの充実を目的に、ROV(遠隔操縦型海中ロボット)「船底点検ロボット」を開発した4)(図2)。開発したロボットは、ハーバースタッフ1名でも持ち運べるように、縦横サイズはA2サイズ、質量は10kg程度になるように設計した。また船底点検と海底落下物の調査のために3台(上方・前方・下方)のカメラと2灯の水中ライトを搭載し、ゲームコントローラからの遠隔操作により潜航し、海中に投光しながら撮影動画を手元PCに配信することができる。本課題は新門司マリーナとの共同研究として実施した。5月にハーバースタッフへのユーザーヒアリングを行った上で設計・製作に取り組み、12月に船底点検作業の実証実験を実施し、2月にスタッフと共に成果物について評価会を開催した(図3、4)。


3.海洋ごみ運搬ロボットの開発
2022年から、海洋ごみ運搬ロボットの開発に取り組んでいる。
海洋ごみは、海洋環境の悪化や海岸機能の低下、景観への悪影響、船舶航行の障害、漁業や観光への影響など様々な問題を引き起こしている5)。海洋ごみの約8割は陸域起源で、陸で発生したものが河川を伝わって海に流出したことが分かっており6,7)、全国各地では海洋ごみ問題の周知啓発と、海洋ごみの流出を少しでも防ぐことを目的に、街頭清掃活動や海岸清掃活動が実施されている8)。
筆者らは、海中ロボット技術を用いて海洋ごみ問題に取り組む中で、海洋環境団体Mr.DIVER(代表:福田佑介)に出会った。Mr.DIVERは10余名からなるボランティアダイバーチームで、海洋ごみの啓発を目的に北九州市の観光地などで水中清掃活動を行っている。水中清掃とは、ダイバーが河川や海中に潜水し、不法投棄された大型ごみや生活排出された小型ごみの収集を行う活動である(図6)。ごみを収集する際は川底まで潜水し、収穫ネットにごみを拾い集め、一定量たまったところで浮上し、川岸まで泳いで運搬する。川岸までは10mから50mを往復する必要があるためダイバーは体力を消耗し、作業効率が低下する。ダイバーが拾い集めたごみを浮上地点から川岸まで運搬するロボットがあれば、ダイバーは水中作業に専念することができ、水中清掃活動の効率化を図ることができる。
そこで本課題では海洋環境の改善と海洋ごみ問題の啓発、水中清掃活動の効率化を目的に、ダイバーを支援するUSV(無人水上艇)、無線遠隔操作型船型協働ロボット「海洋ごみ運搬ロボット」を開発した4)(図5)。
2022年10月、小倉城のほとりを流れる紫川の水中清掃活動に参加し、初めて海洋ごみを運搬することができた。この様子はNHKにより全国放送され、読売新聞の全国紙に掲載された。また2023年10月には、ダイバーの安全確保のために製作した水中ライトと水中スピーカーを装備して、人気観光地である門司港レトロの水中清掃活動に参加した。当日は90分の清掃活動において5往復することで、回収した海洋ごみを全て運搬することができた(図7)。



4.沖縄海洋ロボコンの広報活動
沖縄海洋ロボコンは2014年12月にプレ大会が開催され、2015年の第1回大会に合わせて公式Webサイト(図8)が開設された。筆者は2019年から、Webサイトの管理や協賛依頼フライヤーの作成(図9)、協賛特典の作成など広報活動を推進してきた。ここではWebサイトや協賛活動の現状と今後の課題について述べる。
沖縄海洋ロボコンのWebサイトには主に2つの役割がある。1つは大会に出場する選手への情報提供、もう1つは大会に協賛する企業への情報提供である。選手に向けては、はじめに開催日程を告知し、次に競技規約と出場申し込み画面を公開する。その後、大会当日のスケジュールと出場ロボットポスターを収録したガイドブックを公開し、開催後には期間中の写真を公開する。企業に向けては、はじめに協賛依頼フライヤーと協賛申し込み画面を公開し、次に協賛をいただいた企業のリンクバナーを掲載する。そして開催後には実施報告書を公開する。また協賛をいただいた企業への特典として、Webサイト、ガイドブック、横断幕および選手ゼッケンに企業名を掲載し、返礼品としてオリジナルTシャツを贈呈している(図10)。
2021年からは企業協賛のみで大会を運営しており、今後も大会を継続し充実させるためには、より多くの企業に協賛してもらう必要がある。そのためにも、今後はWebサイトに企業が選手やロボットを応援したくなる仕組みと、選手がロボコンで得た技術や経験を協賛企業で活かしたくなる仕組みを構築することが、大会の活性化に繋がると考える。
具体的には、大会前に各チームの研究背景や研究目的、海中ロボットの概要や選手の意気込みを公開する。また大会期間中には、チームの交流会を開催してその様子を公開したり、開催後には、優勝チームのインタビュー記事を公開したりするなど、選手たちの姿を積極的に発信することが考えられる。
そのほか、海洋産業への就職につながるような企業情報を公開したり、大会期間中に企業と選手の交流会を開催したりすることが考えられる。加えて情報発信の仕方も、関係者がWebサイトを自発的に閲覧するプル型から、大会事務局から関係者に定期的に情報を通知するプッシュ型の運営に転換することが効果的だと考える。
大会の継続と充実に向けて、今後とも広報活動の推進に努めたい。


5.おわりに
本稿では、地域と共同で開発した海中ロボットと沖縄海洋ロボコンの広報活動について紹介した。
学生たちは海や河川に出向き、ハーバースタッフやボートオーナー、ダイバーなど異分野の技術者と交流しながら、外部からの期待を背に緊張感やモチベーションを高めて海中ロボットの開発に取り組んできた。企業との共同研究や地域貢献といった実施形態によって、学生たちの発想力や責任感が向上したと考えられる。
ロボコンの運営においては、選手たちは大会前に競合相手のチームやロボットを確認する機会がない。Webサイトにおいてチーム情報を発信したり、選手同士のWeb交流会を開催したりすることができれば、選手同士が互いの存在を意識し、大会に向けた緊張感やモチベーションを高めることができるだろう。また企業に選手を応援してもらう仕組みを構築することが、大会のさらなる活性化に繋がると期待される。
2023年12月、内閣府はAUV戦略を策定し、「海中ロボコンの開催によりAUVの開発に携わる若い研究者の育成を推進する」ことを掲げた9)。沖縄海洋ロボコンの開催、そして継続と発展に向けて、各企業様には大会の趣旨に賛同をいただき、ご協賛をお願いしたい。
※本論文中の意見は執筆者個人のもので、沖縄海洋ロボットコンペティション実行委員会の公式見解を示すものではない。
参考文献
- 浅海用OBEMの開発, 九州職業能力開発大学校 平成17年度開発課題最終発表会, 2006
- 浅海用AUVEMMの開発, 九州職業能力開発大学校 平成21年度開発課題最終発表会, 2010
- 自律型海中ロボットKPC_AUV2014の開発, 九州職業能力開発大学校 平成26年度開発課題最終発表会, 2015
- 海中作業用ロボットの開発, 九州職業能力開発大学校 令和4年度開発課題最終発表会, 2023
- 環境省:令和元年版 環境・循環型社会・生物多様性白書, 2019
- 公益財団法人かながわ海岸美化財団:なぎさのごみハンドブック, 2011
- 日本財団・日本コカ・コーラ株式会社:陸域から河川への廃棄物流出メカニズムの共同調査, 2020
- 日本財団:海ごみゼロウィーク, https://uminohi.jp/umigomi/zeroweek/(2024.5 確認)
- 内閣府総合海洋政策本部:自律型無人探査機(AUV)官民プラットフォーム提言書, 2023
【著者紹介】
寺内 越三(てらうち えつぞう)
九州職業能力開発大学校 生産電子情報システム技術科 職業能力開発教授
■略歴
- 2002年3月職業能力開発総合大学校 研究課程 電気・情報専攻 修士
- 2002年4月熊本職業能力開発促進センター 情報・通信系
- 2013年4月沖縄職業能力開発大学校 専門課程 電子情報技術科 職業能力開発准教授
- 2019年4月九州職業能力開発大学校 応用課程 生産電子情報システム技術科 職業能力開発教授
2021年から沖縄海洋ロボットコンペティションに実行委員として参加