
教授
内田 敬久
1.研究室の概要
愛知工業大学工学部機械学科内田敬久研究室では、蛇型ロボットや脚型ロボットなど生物模倣型ロボットと車輪型・クロー型移動ロボットを開発している。また、応用として草刈ロボット、サービスロボットの研究も行っている。水中ロボットの研究は2014年より開始し、特にひれ推進によるロボットの開発を進めている。
2. 水中ロボット開発の背景
戦後から開発されてきた多くの社会インフラは建設から30年を超えており、老朽化が深刻になっている。社会インフラは定期的な点検が必要であり、その際は人間による目視や計器による点検が行われている。しかしながら、特に河川や海岸など水を伴う分野では巡視・点検を行っている割合が低いことが報告されている。この要因は、水中にある構造物は目視で状況を把握しにくいことや点検時に専用の機器・設備を用いる必要があり点検費用が高額であること、人による点検では陸上以上に事故の危険性が高く安全性を考慮する必要があることが挙げられる。そこで近年、ロボットが注目されており、水中構造物の調査・点検への導入が進んでいる。それに伴い、水中ロボットの市場規模は大きく拡大すると考えられる。
これまでに開発されているほとんどの水中ドローンの推進には、スクリューが用いられている。これは、スクリューの回転により推進力を得る機構であり、スクリューの向きにより前進・後退、旋回、潜水・浮上の3次元方向への移動が高速で可能である。しかしながら、スクリューで海中の生物を傷つける恐れがあるだけでなく、海藻を巻き込み故障することや浮遊物や沈殿物を巻き上げ調査や点検に支障をきたす恐れがある。沖縄において海底火山の爆発により海中に漂う軽石の影響で船舶の航行が不能になったのは記憶に新しい。
また、水中ロボットの研究において、生物模倣の研究も長年行われてきている。魚、亀、エイなどは体やひれを動作させ特徴的な遊泳をする。生物模倣型ロボットはアクチュエータや材料の弾性を利用して形状や動作を再現している。また、水中生物は、様々な環境下で生活しているため、環境適応力が高い。このため、生物模倣型ロボットは、様々な環境での利用が期待される。例えば、海藻や軽石が漂っていたとしても、流体の流れに沿ってロボットを動かすことで、巻き込みや損傷することなく推進が可能である。しかしながら、一般的にスクリューに比べて推進力は劣り、そもそも調査や点検を目的としていないため、このままでは調査・点検ロボットへの応用は困難である。
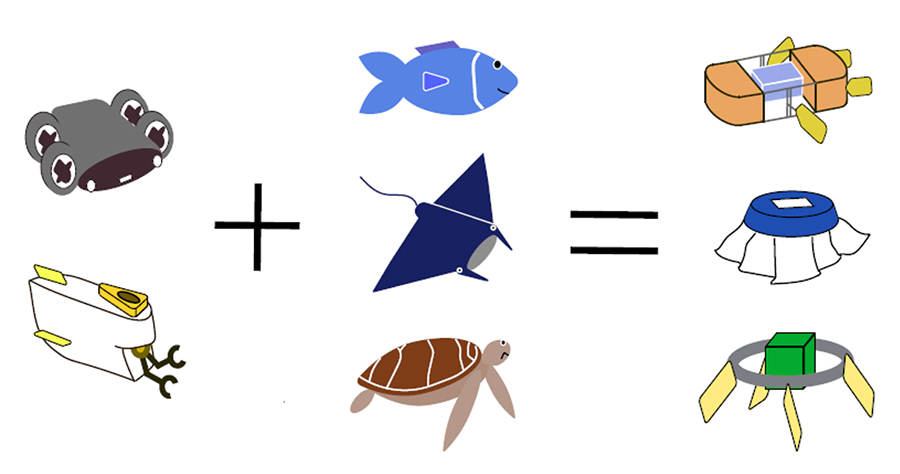
そこで図1のように調査点検ロボットを目的とした生物の特長を活かしつつ生物の形状にとらわれるのではなく、ロボットだからこそ実現できる形状と動作により新たなロボットと推進方法を生み出すことができると考えられる。スクリュー、ひれ、ハイブリッドなど様々な推進方法のロボットを使用環境によって使い分けることで水中ロボットの応用がさらに広がっていくと考えられる。
3. 開発ロボット
一般に点検・調査に求められるロボットの動作機能は、3次元方向に高速で移動できること、波やうねりなどの外乱を受けてもその場に停止し続けることである。そこで、研究室では、ひれ推進による特徴的なロボット(Albero, Cakram, Cerchio)を開発してきた。これらのロボットの大きさは、また構造物の点検などを想定し、狭い空間での移動にも対応できるように、全長・全幅・全高それぞれ1m以下である。
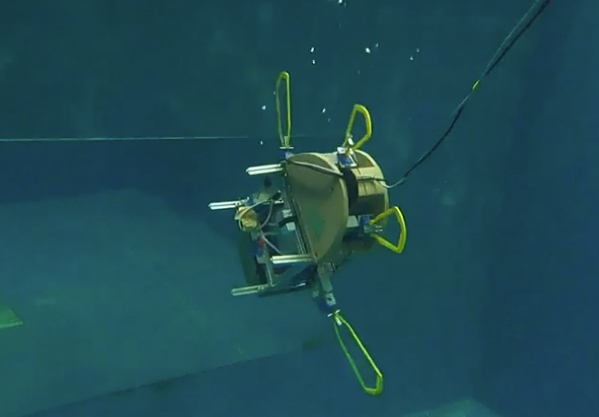
Albero は、図2に示すように、3自由度のひれを左右2つずつ合計4つ持ち、中央部に制御ボックスを配置しているロボットである。4つのひれを用いて、ローリング(前後)運動とフェザリング(捻り)運動を組み合わせた抗力型推進を実現している。推進原理は、水の抗力を大きくし前方から後方へ動かくことで反力を得るパワーストロークと水の抗力を小さくし次のパワーストロークの開始位置までひれを前方に戻すリカバリーストロークを繰り返すことで推進するボートを漕ぐようなパドル推進である。Alberoは、前進に対しては高い推進性能があるものの姿勢を維持したままの上下左右への移動は不得手であり、姿勢維持には工夫が必要である。このため、姿勢維持と潜水・浮上にはバラストにより浮力の調整機能を付与している。
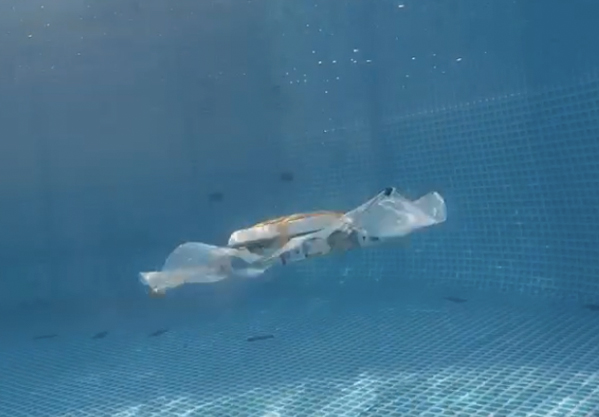
Cakramは、図3に示すように全周に一体型のひれとひれを支える基軸となるきじょうから構成されている。Cakramは、きじょうを同じ周波数で位相差をもたせて上下に動作し進行波を発生させることで、水から進行波の進行方向とは反対向きの反力を受けこれを推進力としている。Cakramは、旋回動作を行わずに姿勢を維持したまま全方向への移動が可能である。推進性能が低いため、波などの外乱が小さく流れのない池などの利用に向いている。
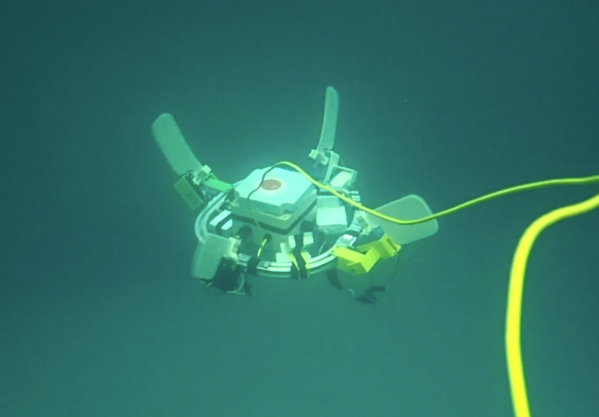
Cerchioは、図4に示すように4つひれを有する円盤形ロボットである。推進力を得るために独立したひれを円周上に等間隔で配置している。2自由度のひれにより推進力の大きさと方向を独立で制御し、4つひれの合力としてロボットを推進する。このため、潜水・浮上を含めた3次元方向の推進を実現している。
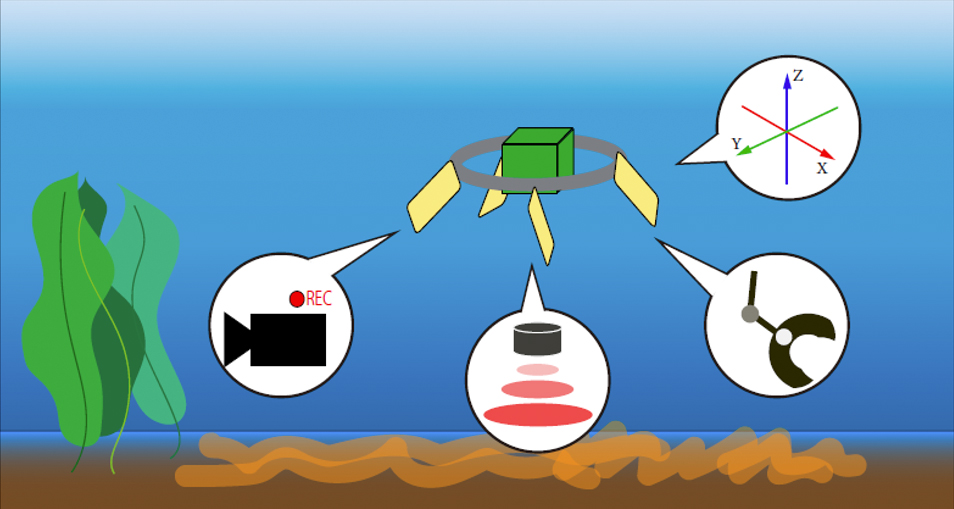
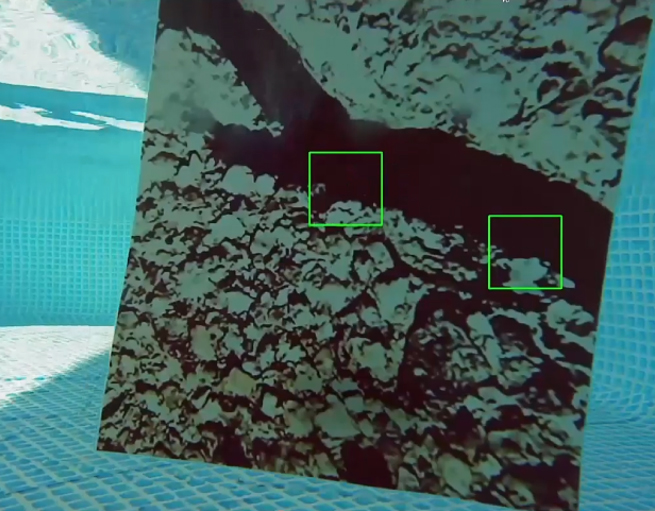
これらのロボットには、図5のように三次元位置、速度、姿勢などの状態把握のためのセンサを搭載している。慣性センサIMUによる姿勢と、圧力センサによる深度計測は比較的使用環境に左右されず、安定して安価に計測が可能である。また、オプションとして、カメラやデプスカメラを用いたオプティカルフローなど画像処理による相対位置推定や機械学習による物体の点検調査を可能としてる。例えば、図6のようにコンクリートブロックの異状検査では撮影画像から機械学習によりひび割れなどの検知や生物の判別が可能である。超音波による深度や物体の計測は現在研究中であり安価で使用しやすいセンサ及びデータ信号処理の開発が待たれる。
水中ロボットの操作は、ロボットと操作者のリアルタイムで安定した通信のために、有線ケーブルを用いている。また、緊急時にロボットを回収することも可能である。さらに様々なセンサ情報を把握しかつ個々のひれなどのアクチュエータの操作は熟練のスキルが必要であるため、ユーザインターフェースと半自律制御を組み合わせた操作方法も開発している。
4. おわりに
研究室には大学院生と学部生合わせて14名が在籍し研究活動を行っている。また、愛知工業大学には、学部・学科を超えた教員・学生のロボットを通した交流施設であるロボット研究ミュージアムがある。ミュージアムでは学生は自由にロボット製作をすることができ、研究室にとらわれず、異なる知識を持つ学生と交流し、刺激を受けてよりよいロボット開発につなげている。水中ロボットの開発もその中で行われており、研究室とは別に水中ロボットの大会や展示会参加を目的とした学科や学年の垣根を超えた学生チャレンジプロジェクトのチームを結成し、沖縄海洋ロボットコンペティションや水中ロボットコンベンションin JAMSTEC、ロボカップアジアパシフィックなどで成果を発表している。プロジェクトを通して、ものづくりの知識のみならず、人間力も身につけることができエンジニアとしての基礎を学んでいる。今後も研究活動を通して人材育成に力を入れていきたい。
【著者紹介】
内田 敬久(うちだ よしひさ)
愛知工業大学 工学部機械学科 教授
ロボット研究ミュージアム 教授
Yoshihisa Uchida, Dr. Eng., Professor
Department of Mechanical Engineering, Aichi Institute of Technology
■略歴
- 2003年4月愛知工業大学工学部機械工学科講師
- 2007年4月愛知工業大学工学部機械学科准教授
- 2018年4月愛知工業大学工学部機械学科教授(現在に至る)
- 2019年4月愛知工業大学地域連携本部ロボット研究ミュージアム教授(現在に至る)
- 2021年4月愛知工業大学学生支援本部キャリアセンター長(現在に至る)
- 2021年4月愛知工業大学学長補佐(現在に至る)
水中ロボット、モジュールロボット、草刈ロボット、サービスロボットに関する研究に従事