
関西センター産学官連携推進室
連携主査
村井 健介
2.2 フォトニクスによるロボットの高度化について
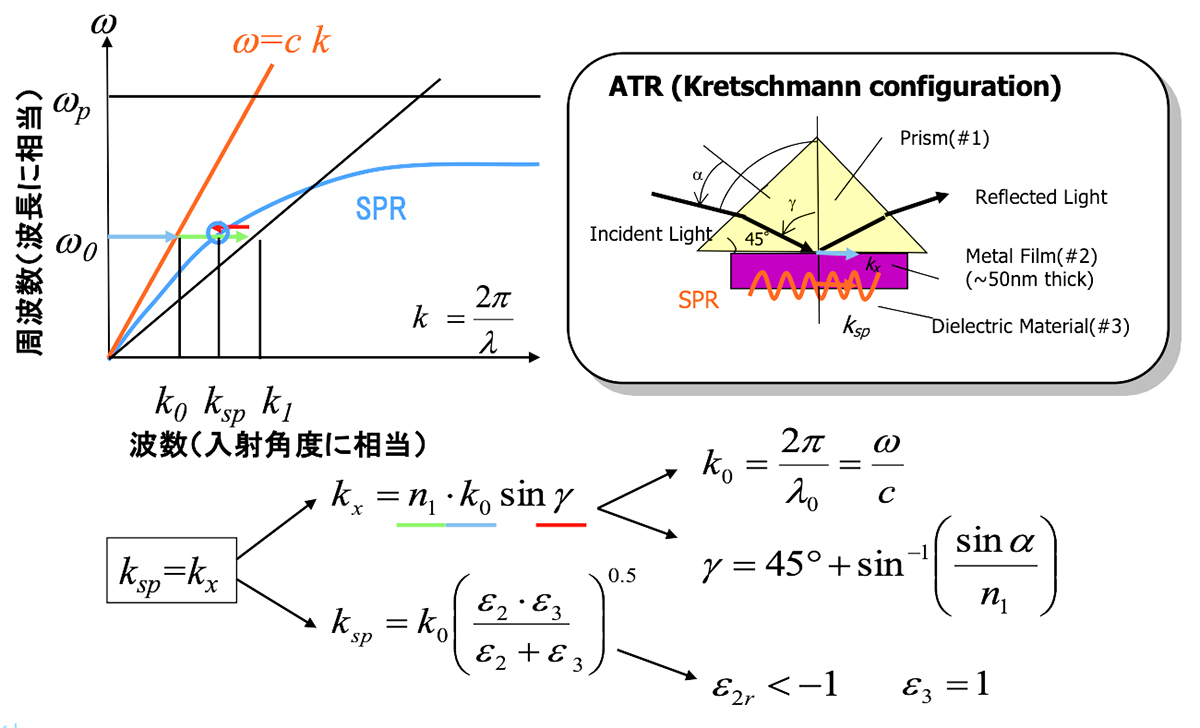
以下に、フォトニクスによるロボットの高度化に向けて、筆者が研究開発してきた「プラズモニックデバイス」を例に紹介する。金属中には自由電子があり、金属イオンと自由電子とが混在するプラズマ状態の一種であるといえる。自由電子によるプラズマ振動が金属の光物性を決めている。金・銀・銅・アルミなど導電性の高い金属材料の表面付近では、特殊な現象(プラズモン現象)が起こり、表面プラズモン共鳴(SPR; Surface Plasmon Resonance)や局在プラズモン共鳴(LPR; Localized Plasmon Resonance)によって、特定の波長の光が共鳴吸収される(図2,3, 表1参照)。
| 材質 | 金(Au)、銀(Ag)、銅(Cu)、アルミ(Al) |
|---|---|
| 伝播速度 | 光速に近い |
| 減衰距離 | 5μm程度 |
| 寿命 | 数10fs程度 |
| 共鳴特性 | 反射率0.1%以下(-30dB以上) |
| 角度幅 | 1°以下 |
| 波長幅 | 50 nm程度 |
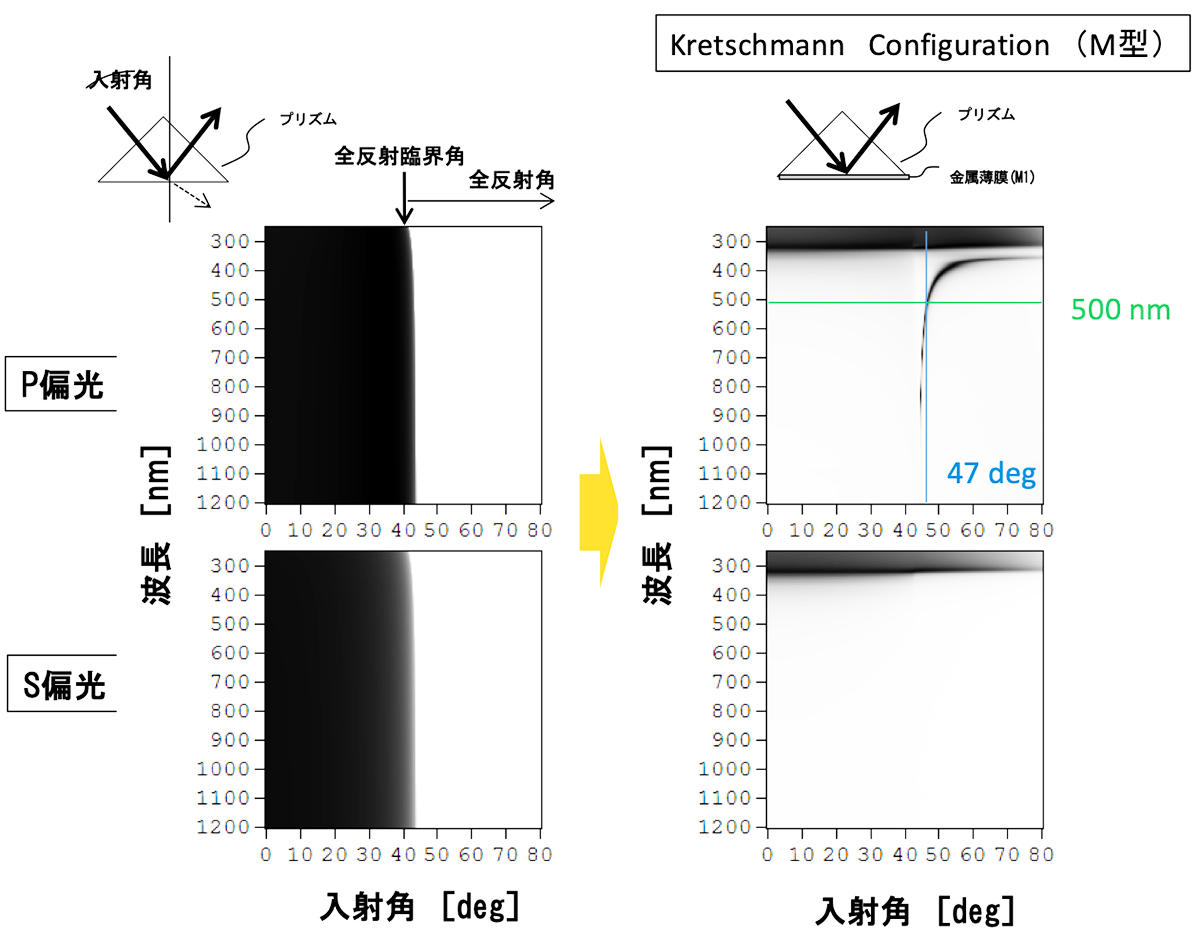
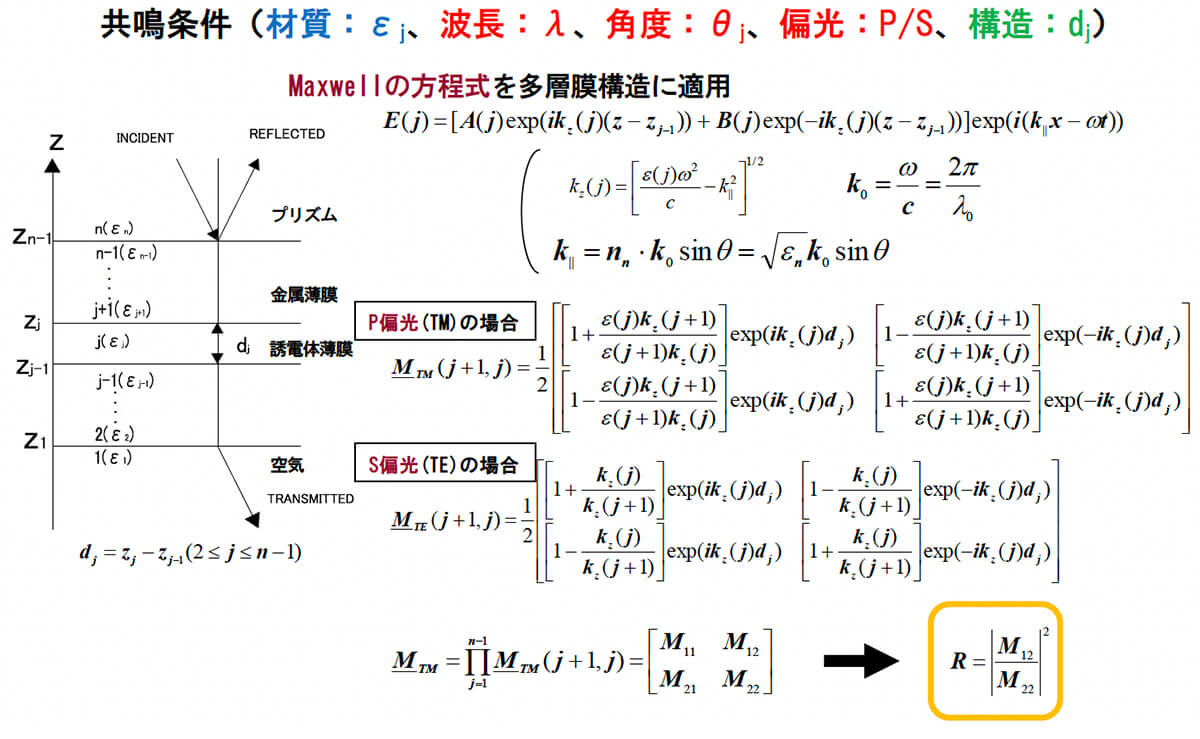
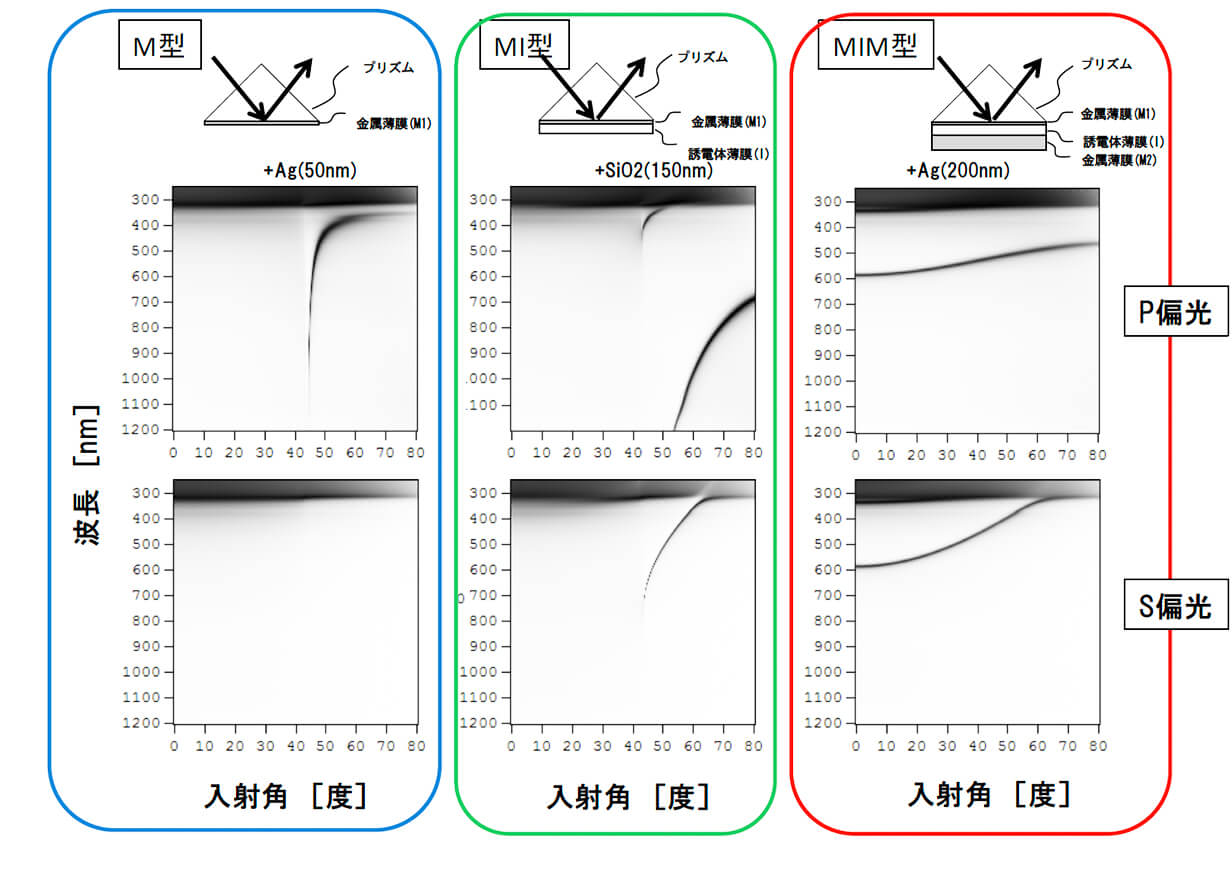
特に、表面プラズモン共鳴(SPR)13)では、金属薄膜への波長・入射角・偏光に敏感な共鳴吸収を示す。この吸収を制御すれば光センサに応用できることになるが、光によるSPRの励起はプリズムなどを使った全反射条件下で起こるためデバイス化にプリズムが必要であるという課題があった。しかし、多層膜構造に対するマトリックス法による反射スペクトルを予測した結果、デバイス構造をサンドイッチ構造(MIM構造、あるいはMGM構造)にすることで、プリズムが不要なデバイスが設計可能であることを見出している。14)(図4-7、表2参照)
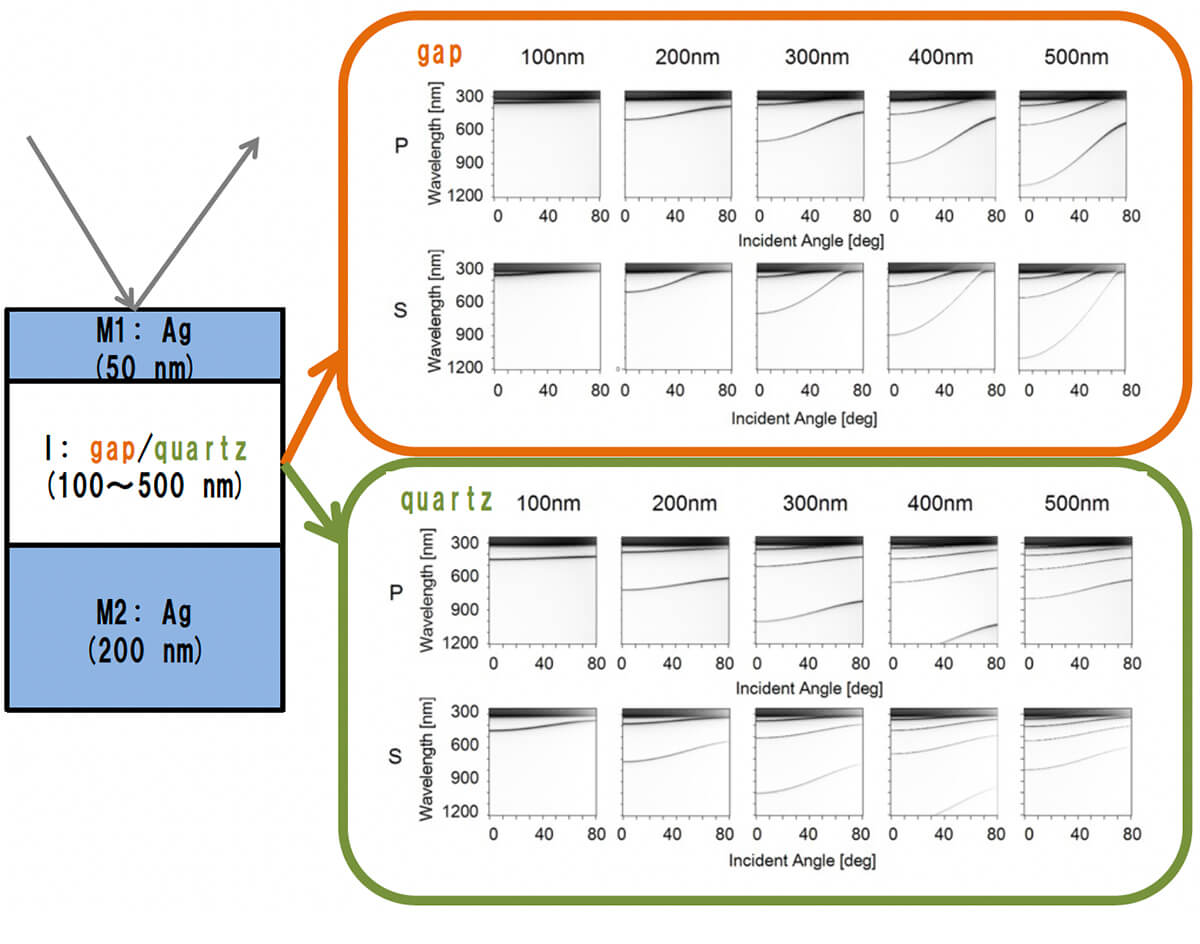
| 名称 | MIM構造 | MGM構造 |
|---|---|---|
| 構造 | Metal-Insulator-Metal | Metal-Gap-Metal |
| 基板 | 2(または1) | 2 |
| M層(M1, M2) | 銀(Ag) | 銀(Ag) |
| I層・G層 | I層(シリコーンゴムなど誘電体) | G層(空間) |
| 保持方法 | 積層 | 両端固定 |
| 感度 | △(I層次第) | ○(G層:空間) |
| 小型化 | ○ | ×(ギャップ保持) |
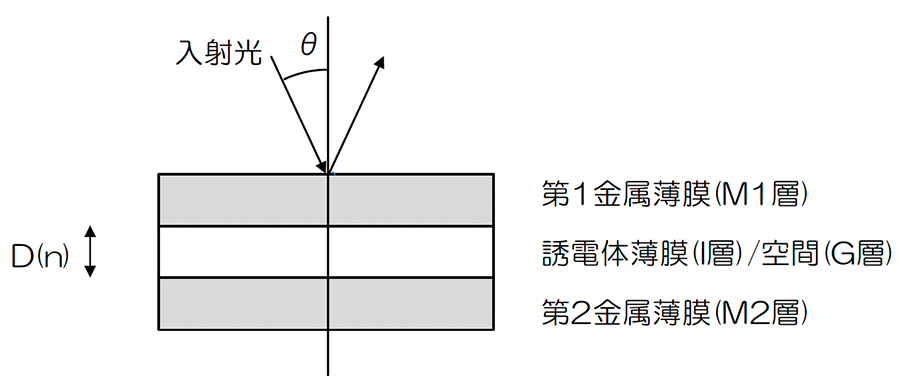
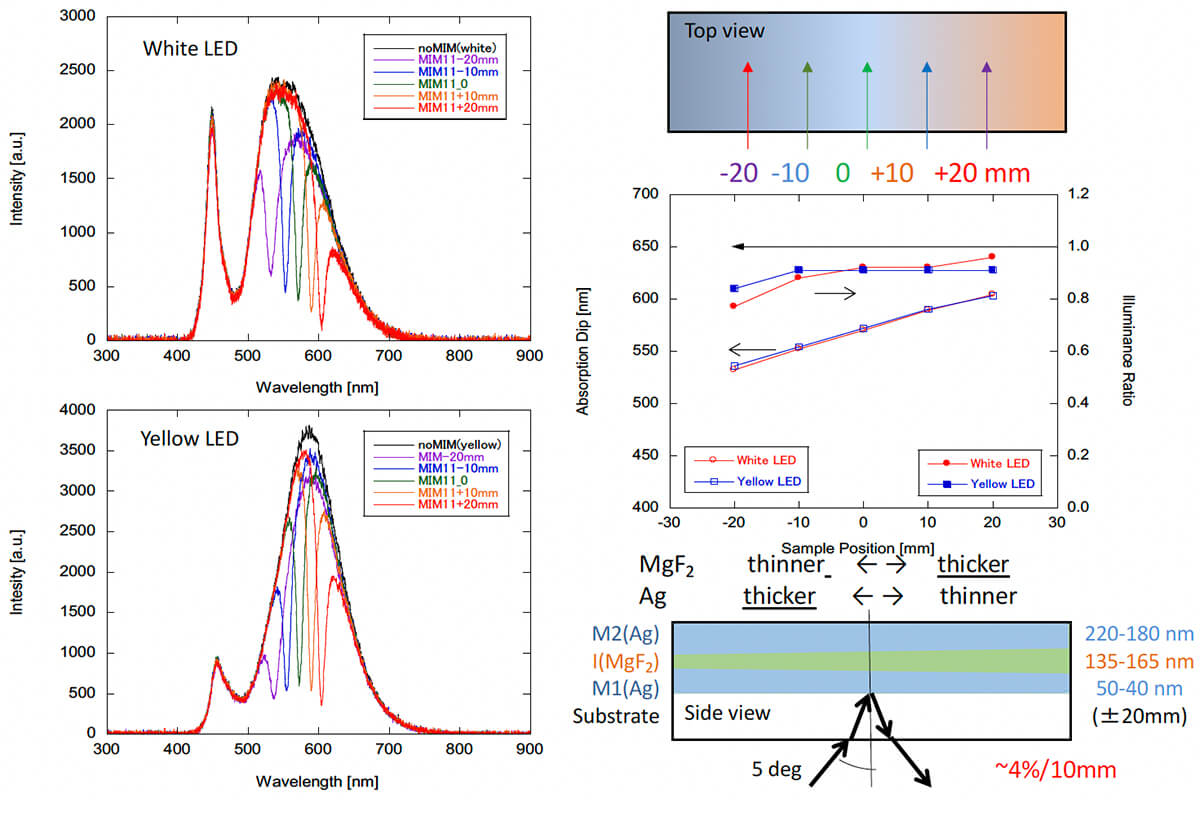
共鳴する波長は、金属薄膜にサンドイッチされた媒質の屈折率や厚さによって制御できる(図8参照)。具体的には、屈折率や変位に数%の変化を与えることができればセンシングが可能となる。例えば、電気光学効果による屈折率を変化させて、光波長通信に応用することができる。あるいは、圧力や振動によって厚さを変化させて、変位センサや振動センサとすることができる。このデバイスは、反射光のスペクトル変化をセンシングすることになるので、電力供給が不要のデバイスとすることも期待できる。無電源のセンシングデバイスは、トンネルなどインフラ点検における歪みセンシングや打音検査など、長期的な変化をモニタリングする用途に向いている。
ここで紹介したプラズモニックデバイスによって可能となる光通信や光センシングがロボットの高度化に貢献することを期待している。
3.ロボットフォトニクスに向けた人材育成
日本機会学会が編集した教科書「ロボティクス」15)には、ロボットには技術的側面と社会的側面があることが述べられている。技術的側面(シーズ)から観るとロボット工学は多くの工学分野が関係する統合型技術であるが、社会的側面(ニーズ)から観ると役に立つロボットはアプリケーションによって決まる要求仕様や作業特性によって実現できる。統合システムであるロボットの普及のためには、ロボット技術を通じて社会課題を解決する人材の育成が不可欠である。ロボット技術者には協調性や共創力が求められる。米国が提唱したSTEM教育(S:Science、 T:Technology、 E:Engineering、 M:Mathematics)にArtを加えたSTEAM教育は、世界的に推進されている共創的な取り組みである。日本でも、専⾨領域の枠にとらわれない多様な「知」が集うことで、「総合知(文理融合)」の人材育成によって共創力を生み出し、科学技術・イノベーションの⼒を⾼めることが期待されている。2025年に開催予定の大阪・関西万国博覧会は、「いのち輝く未来社会のデザイン」をメインテーマとして、SDGsやSTEAM教育もテーマ事業である。
4.おわりに
本稿では、次世代ロボットの高度化と革新サービスを提供する「ロボットフォトニクス」について紹介した。現在の人類は、(地球温暖化など環境問題、人口問題、食糧問題とともに、災害や紛争など)多くの社会課題を抱えたVUCAの時代にある。VUCAという言葉は、Volatility(変動性)、Uncertainty(不確実性)、Complexity(複雑性)、Ambiguity(曖昧性)という4つの言葉の頭文字をとった造語である。VUCAの時代を切り拓くのは、共創的な取り組みであり、STEAM教育を通じたロボットフォトニクスの今後の進展に期待したい。
★謝辞
本稿を執筆するにあたり、一般社団法人レーザー学会ロボットフォトニクス専門委員会をはじめ、公益社団法人レーザー技術総合研究所(レーザー総研)、特定非営利活動法人日本フォトニクス協議会関西支部(JPC関西)、近畿経済産業局、大阪大学レーザー科学研究所、国立研究開発法人産業技術総合研究所の関係者のご協力に深く感謝する。
★参考文献
- K. Kurosawa, R. M. Pierce, S. Ushioda, and J. C. Hemminger, “Raman scattering and attenuated-total-reflection studies of surface-plasmon polaritons”, Phys. Rev. B 33, 789 (1986).
https://journals.aps.org/prb/abstract/10.1103/PhysRevB.33.789 - 「波長フィルタ、波長フィルタリング装置及び波長フィルタリング方法」(特許第4649595号)
- 教科書「ロボティクス」, (2011年11月, 日本機会学会編), ISBN:978-4888982085.
【著者紹介】
村井 健介(むらい けんすけ)
国立研究開発法人産業技術総合研究所 関西センター産学官連携推進室 連携主査
一般社団法人レーザー学会「ロボットフォトニクス」技術専門委員会 主査
■略歴
1987年大阪大学工学部精密工学科卒業。大阪大学大学院工学研究科精密工学専攻(前期)、電気工学専攻(後期)。大学ではプラズモンについて、大学院では大阪大学レーザー核融合研究センター(現在の大阪大学レーザー科学研究所)でエキシマレーザーやX線レーザーについて研究。レーザープラズマを利用した軟X線レーザーに関する研究で博士号を取得。
1995年工業技術院大阪工業技術研究所(現在の産業技術総合研究所関西センター)入所。入所後は、プラズモニクスやレーザープラズマなど、光と物質の相互作用の応用研究。内閣府総合科学技術会議や近畿経済産業局への出向時にロボット政策に関与。近年は産学官連携推進活動に従事。
博士(工学)。技術士(応用理学)。日本ロボット学会(RSJ)正会員。レーザー学会(LSJ)正会員、「ロボットフォトニクス」技術専門委員会主査。