
先進自動車研究所
所長/特任教授
DIVPプロジェクトリーダー
井上 秀雄
4.DIVPシミュレータの自動運転車安全性評価への応用例
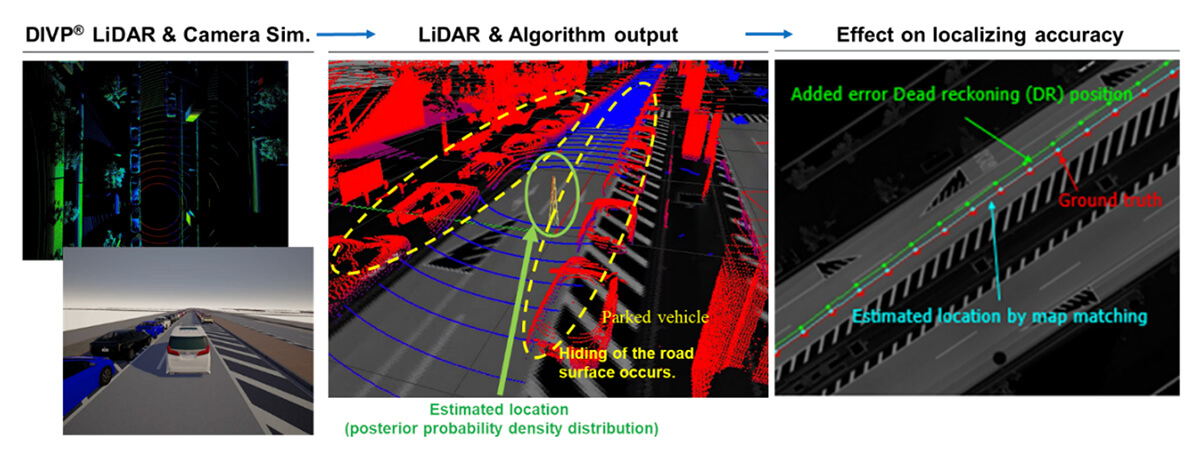
4.1. 自己位置推定アルゴリズムのロバスト性評価への応用
AD-URBANシステム4) では、LiDARを利用したマップマッチングによる自己位置推定アルゴリズムを構成している。このロバスト性評価のために、DIVPシミュレータで走行路面を隠すように駐車車両が多数並んだ厳しい条件をLiDAR出力の仮想空間モデルとして生成した。その評価の結果、AD-URBANの自己位置推定アルゴリズムは常に正解値と一致し高いロバスト性を有することが検証できた(図9)。この様に、DIVPは,現実空間では設定が難しい条件の設定が可能でシステム評価に貢献できる。
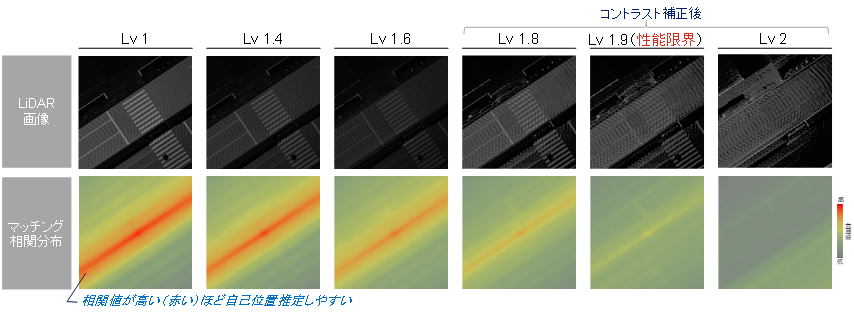
4.2. 横断歩道認識限界評価への応用(路面濡れ条件の抽出)
前節同様にAD-URBANシステムの路面濡れ条件でLiDARでの路面横断歩道などのオルソ地図との位置マッチングアルゴリズムの認識性能限界をDIVPシミュレータにより使い評価した。DIVPで生成したLiDAR出力から濡れ路面を再現し、コントラストレベルをパラメータとして水準を設定することで認識限界(図10、Lv.1.9)を導き出すことができた。
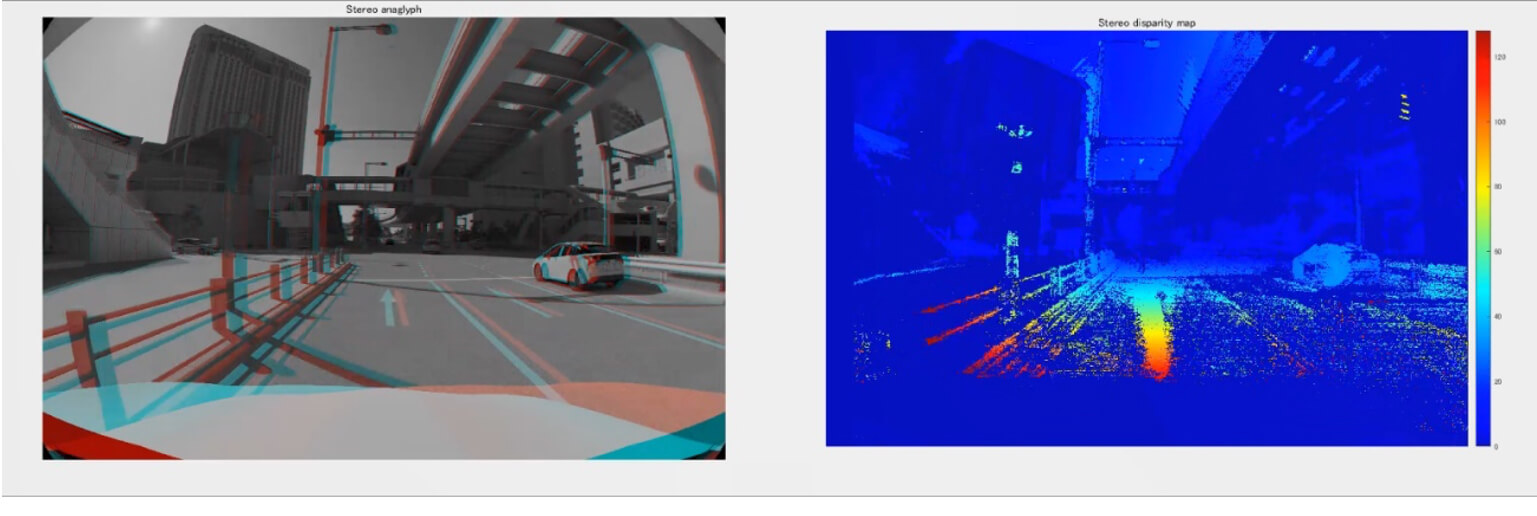
4.3. ステレオカメラの測距性能アルゴリズム評価への応用
車載センサ界では、センサフュージョンがその代表例として、複数種類のセンサを束ねて複合化し、それらを高度な統合信号処理する潮流が続いている。この分野の技術者は、高度な複合センサシステムの全てを一貫してシミュレートできるような研究プラットフォームを切実に欲している。この点でDIVPシミュレータ(Simulink版)は、ブロック図を描く感覚で複数センサを並べて複雑なシステムを設計でき、更にMATLABのToolbox群を活用した高度信号処理が可能であり、時代の流れと非常にマッチしている。一例として図11は、2台のカメラを並列化し、ステレオカメラを実現した例である。MATLABの「Computer Vision Toolbox」5) を活用し、視差は30cmとした。
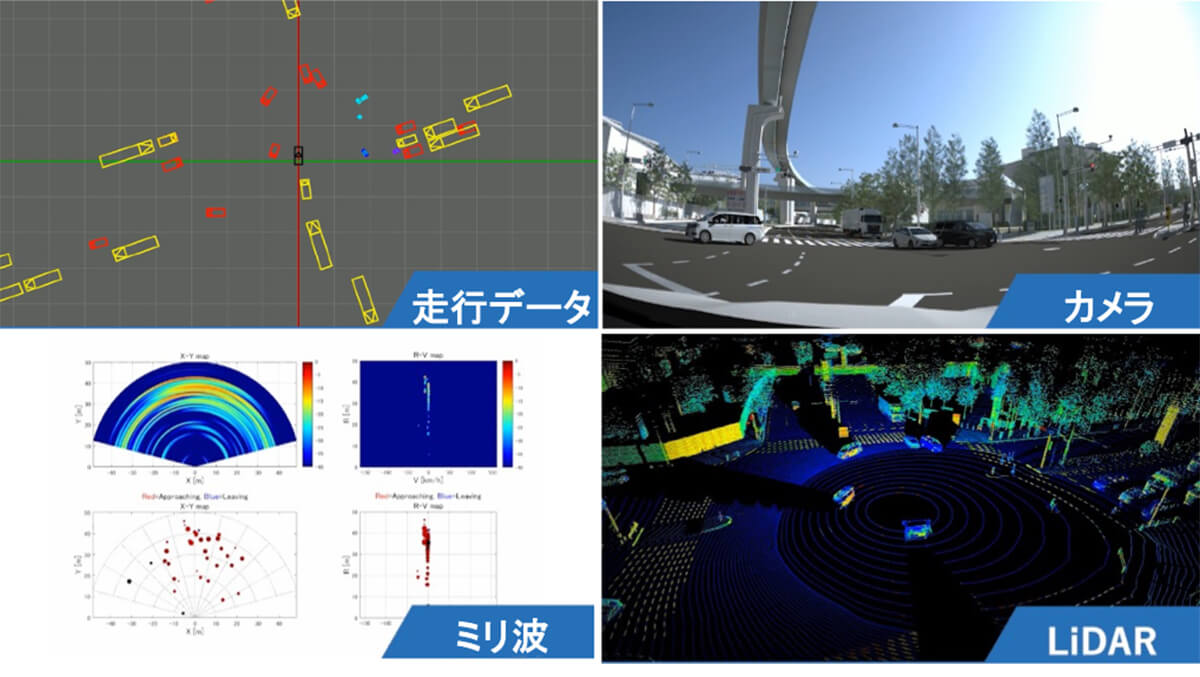
4.4. 自動運転車の交差点右折時の安全性評価への応用
実際の交差点右折時のデータから、DIVPシミュレーションで交通状況と、カメラ、ミリ波レーダ、LiDARから観た知覚・認識状況を再現し、対向車などの認識性能と安全余裕等の評価指標の導出にも取り組んでいる。時刻同期されたシミュレーションプラットフォームであるため、様々な交通環境の交差点での認識能力と安全余裕の両面の安全性評価に対応できる可能性がある(図12)。今後、交差点評価シナリオの構築や自動運転車のアルゴリズムの評価指標として開発していく。
この他にも、AI強化学習用のイメージデータ生成への応用、4Dイメージングミリ波レーダでのフリースペース生成アルゴリズム開発への適用、ミリ波レーダやカメラなどHILS(Hardware in the Loop simulation)への応用など、応用例は多岐にわたる。
5.国際連携・標準化
安全性評価に関し、世界各国では様々なアプローチが試行されている。従来の独BMWiの予算で実施され、2019年に完了したPEGASUSプロジェクト6) やその後継となるSET Levelプロジェクト7) は、シナリオをベースとしてアプローチとして有名である。
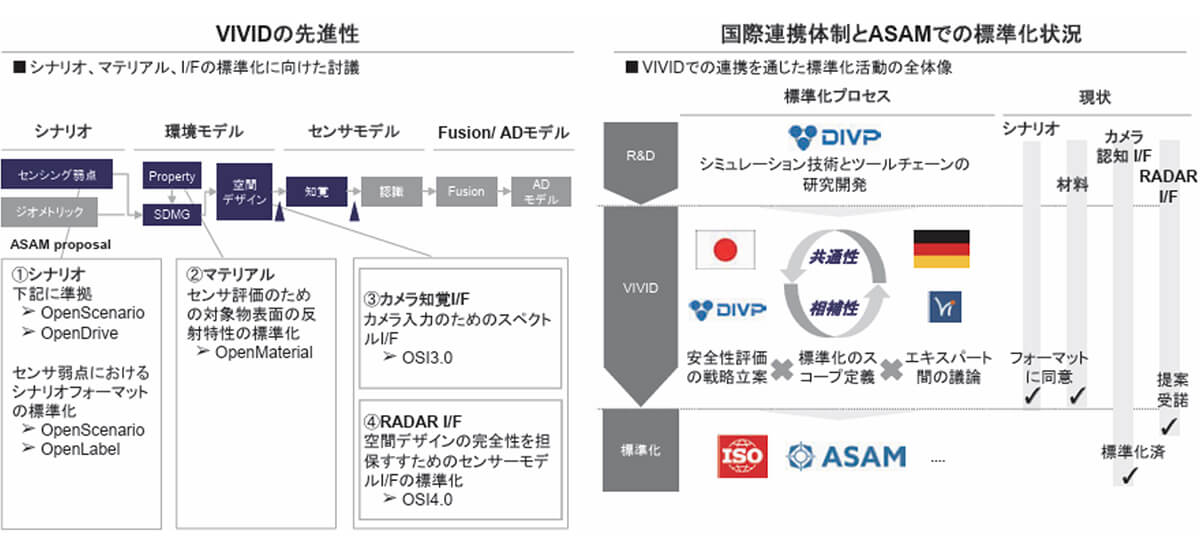
DIVPでは独VIVALDIプロジェクトと連携し、センサのモデル化をもとに自動運転の安全性評価に貢献するVIVIDプロジェクトとして国際連携活動を実施してきた。VIVIDは、内閣府SIP-adusとドイツ連邦教育研究省(BMBF)の支援の下で、2020年10月より開始され、このプロジェクトを通じ、自動運転安全性評価体系とインターフェース標準化等を推進した。
更に、自動運転に関し幅広い標準化活動を実施している国際標準化団体ASAM8) に対しては、DIVPからOpenDRIVE/OpenSCENARIO,OSI(Open Simulation Interface)等の主要WGに参加し、DIVPの特徴となるセンサ弱点シナリオ記述、各環境モデル対象への反射特性、センサ等各モデル間のI/Fの標準化などの提案を進めている。カメラ入力に関するI/FについてはOSI3.0の標準仕様の実績を達成し、最近では、各センサ対象の反射物性データを定義するOpenMATERIALのWG活動でDIVPが主導的立場になっている。(図13)
6.まとめ
世界の自動運転開発は既に社会実装の段階へ入っており、ここ数年の米中日の目まぐるしい動きになっている。日本では国家プロジェクトの役割が大きく、その中で「DIVP」は安全性評価のための「仮想空間シミュレータ」の開発を行っている。
自動運転の安全性検証テストには隠れたパラメータが無数に存在し、実車テストだけでは到底カバーできる量・質ではなく、「仮想空間シミュレータ」によってデジタルツイン的に補うことが必須である。
ただしその仮想空間シミュレータは、自動運転車の「眼」となるセンサの弱点となる環境や検出原理に基づく事象を、忠実に再現できなければならない。この再現性・リアリティの点で、DIVPシミュレータは、世界トップレベルにあり先駆的な役割を果たしている。
仮想空間シミュレータは、単純な単体センサモジュール用シミュレータの枠を超えて、自動運転を支える幅広い基盤技術へと成長しつつある。複数センサを複合化したシステムの高度な統合信号処理のための、研究開発プラットフォームとしての活用も可能である。
複雑化する自動運転開発において、安全性評価・検証を効率的、かつ幅広く実施するための基盤技術になれば幸いである。
参考文献
- 「Computer Vision Toolbox 入門」、Mathworks社オンラインマニュアル
https://jp.mathworks.com/help/vision/getting-started-with-computer-vision-system-toolbox.html - 菅沼直樹(金沢大学):SIP第2期自動運転(システムとサービ スの拡張)「自動運転技術(レベル3,4)に必要な認識技術等に 関する研究」,(2020)最終成果報告書(2018~2022), p120-p128
- PEGASUSProjectOffice(DeutschesZentrumfürLuft-und Raumfahrt e. V.(DLR),GermanAerospaceCenter, InstituteofTransportationSystems)PEGASUSMETHOD AnOverview, https://www.pegasusprojekt.de/files/tmpl/Pegasus-Abschlussveranstaltung/PEGASUS-Gesamtmethode.pdf,(参照2021.06)
- SETLevelProjectOffice(DeutschesZentrumfuerLuft-und Raumfahrt e.V.(DLR),GermanAerospaceCenter(DLR), InstituteofTransportationSystems):SETLevel Project, https://www.dlr.de/en/images/2021/2/the-set-level-project,(参照2021.06)
- ASAM e.V. Association for Standardization of Automotive and Measuring Systems,
https://www.asam.net/
【著者紹介】
井上 秀雄(いのうえ ひでお)
神奈川工科大学 先進自動車研究所 所長/特任教授(常勤)
DIVPプロジェクトリーダー
■略歴
- 1978.3早稲田大学理工学部機械工学科卒業
- 1978.4~2016.3トヨタ自動車(株)
・BRVC室長,車両制御開発室 室長,統合システム開発部 部長,先端・先行企画室長(部長格)等を歴任. - 2013.4~現在東京農工大学 大学院工学府 機械システム工学専攻 客員教授
- 2016.4~現在神奈川工科大学 創造工学部 自動車システム開発工学科 教授
- 2017.4~(兼務)工学教育研究機構 先進自動車研究所 所長・教授
・専門;自動車工学,車両運動,制御システム工学,統合システム/統合安全,運転支援/自動運転
日本自動車技術会 代議員,編集委員,査読委員,アクティブセーフティ部門委員会 委員
■受賞
- 1992 24th FISITA Paper Award, Development of Vehicle Integrated Control System
- 1998 28回市村産業賞 貢献賞, 「VSC(Vehicle Stability System)の開発」
- 1998 31回機械振興協会 通産産業大臣賞, 「横滑り防止 車両安定性制御システムの開発」
- 2009 The US Government Award for Special Appreciation for contributions to the development and popularization, award by the National Highway Traffic Safety Administration(NHTSA) at the 21th ESV Congress
- 2016日本機械学会 交通・物流部門 業績賞