
先進自動車研究所
所長/特任教授
DIVPプロジェクトリーダー
井上 秀雄
1.背景・概要
日本での自動運転の国家プロジェクトは、SIP第1期『自動走行システム』、第2期『自動運転(システムとサービスの拡張)』と9年間(2014年度~2022年度)に渡り”競争と協調”の考え方のもと、産学官連携、省庁横断、業界連携・学学連携・国際連携など幅広い領域が一体となった研究開発活動や東京臨海部実証実験等を推進し大きな成果をあげてきた。また,レベル4の推進については、経済産業省と国土交通省が主導する「自動運転レベル4等先進モビリティサービスの研究開発・社会実装プロジェクト(RoAD to the L41))」として2021年度~2025年度のプロジェクトとして事業が進められている。
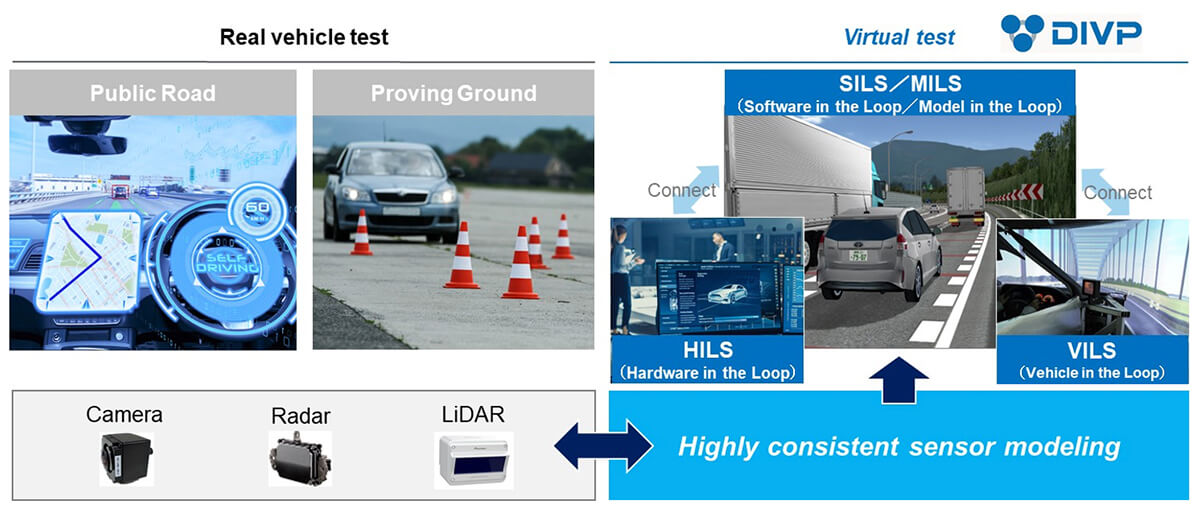
自動運転の最大の課題は安全性の確保である。また、システムが運転を行う自動運転に対する不安や恐れを軽減し、事故が起きた場合の責任の所在を明確にしていくためには、安全性の論証が必要である。SIP自動運転では,公道での実証実験を安全性の検証の重要な手段と位置づけ、東京臨海部実証実験を推進してきた。一方で、安全性の検証には事故を模擬した危険な条件での評価も必要であり、公道での実証実験だけで全てをカバーすることはできない。このためSIP第2期では、自動運転車両にとって重要なセンサ性能評価も可能な実環境と一致性の高いシミュレーション環境の構築にオールジャパン体制で取り組んだのが「DIVP(Driving Intelligence Validation Platform)プロジェクト(仮想空間における自動走行評価環境整備手法の開発)」2) 3) である(図1)。
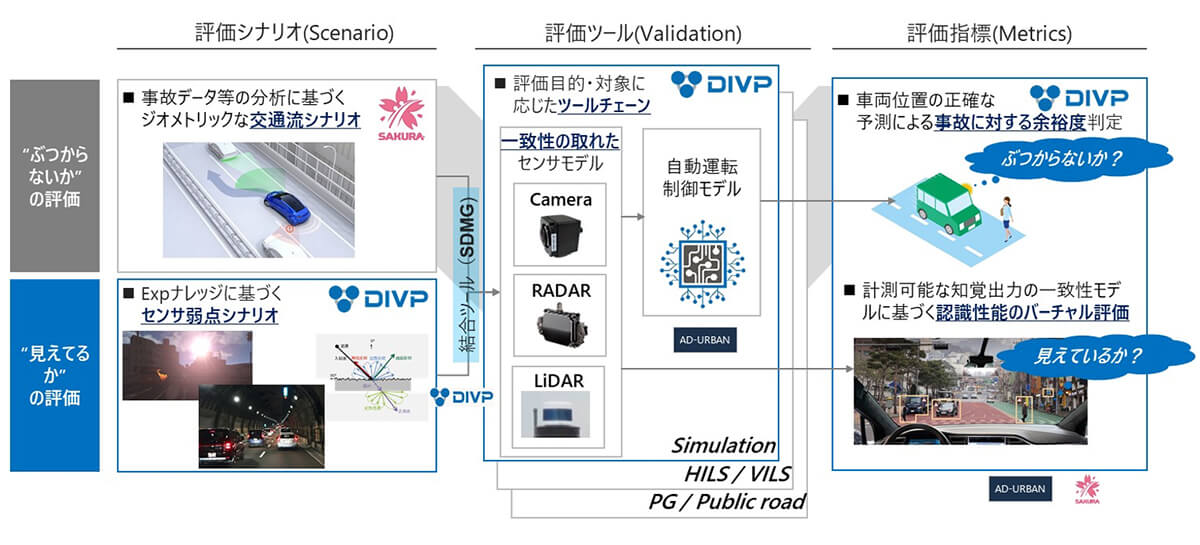
SIP自動運転の2022年度での終了にともない、2023年度からは経産省の「無人自動運転等のCASE対応に向けた実証・支援事業」に組み込まれ、「DIVP」「SAKURA」「AD-URBAN」を束ね、安全性評価基盤検討タスクフォースとして連携を強化し、RoAD to the L4や産業界の研究開発に貢献する自動運転/ADASの安全性評価シミュレーションプラットフォームを構築中である(図2)。
2.実現象と一致性の高いセンサシミュレーションの構築
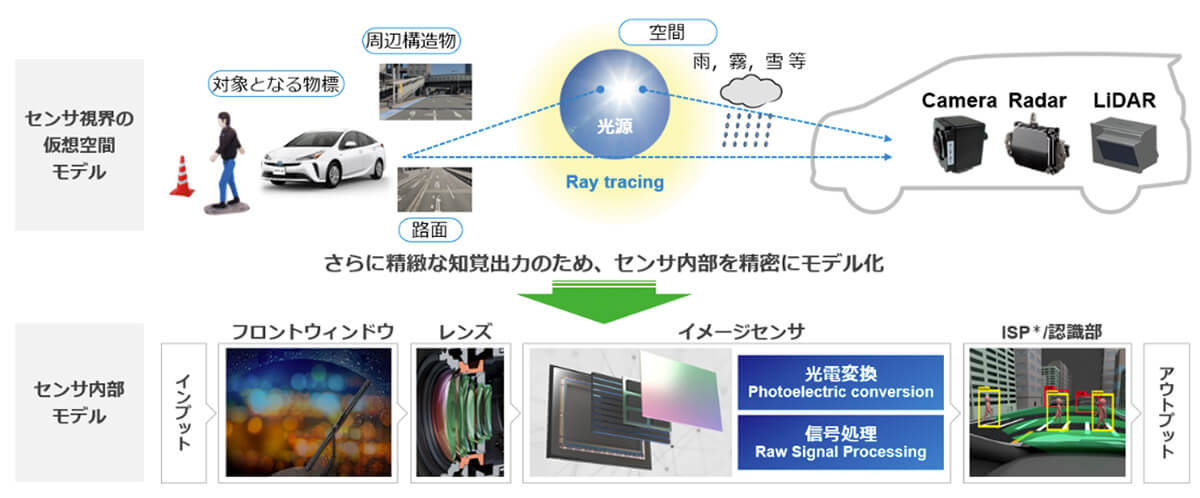
外界認識センサは、通常の車両コンポーネンモデルと異なり、走行環境モデルと自動運転制御を繋ぐ機能的役割を担っている。従来のシミュレータでは、システム制御が正しく動くかの評価に主眼が置かれ、いわゆる真値(正常機能)ベースのセンサモデルの採用が多い。先にも述べたように、自動運転車の安全性保証には、周辺監視センサそれぞれの長所と弱点(限界)を把握し、システム設計やセンサ知覚認知アルゴリズムの改良を進める必要がある。しかし、真値ベースのセンサモデルでは電磁波の空間伝搬の検証結果をモデルに反映することが難しく、センサの弱点となるような環境条件をモデルに反映させることは困難である。本プロジェクトでは、ミリ波レーダの電波、カメラにおける可視光線、LiDARの近赤外光のそれぞれの反射特性(再帰、拡散、鏡面反射など)や透過特性を物理モデル化し、レイトレースなどの空間伝搬モデルとして構築している。さらに、高度な実験・計測技術を用いて雨や霧, 太陽光などの周辺照度等の周辺環境の影響で変化する実現象の物理モデル化にも取り組んできた。これらをもとに、センサから見た空間伝搬特性を電磁波原理に基づく「走行環境~空間伝搬~センサ」の一連のモデルに反映している点がほかにないDIVPシミュレーション基盤のユニークな点である。(図3)

3.センサ検出弱点に対応した仮想空間モデルの構築
自動運転車の「眼」となるセンサは、カメラ・LiDAR・ミリ波レーダの3種類がある。シミュレータ製品の中にはこのうち一部しか対応しないものも見られるが、DIVPプロジェクトが開発したシミュレータは3種類すべてを時刻同期させてシミュレートできる(図5)。
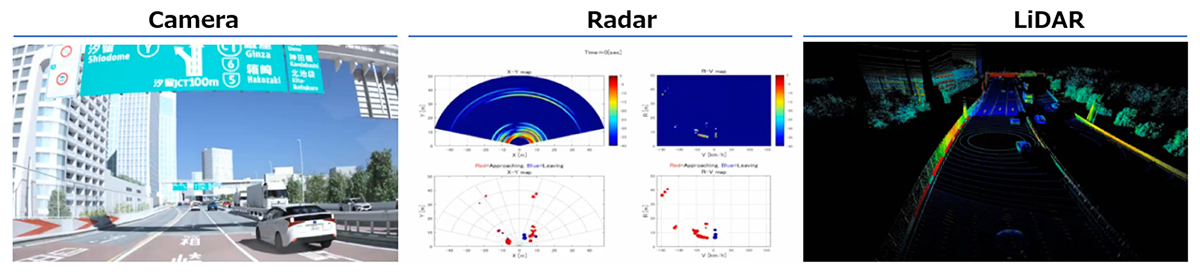
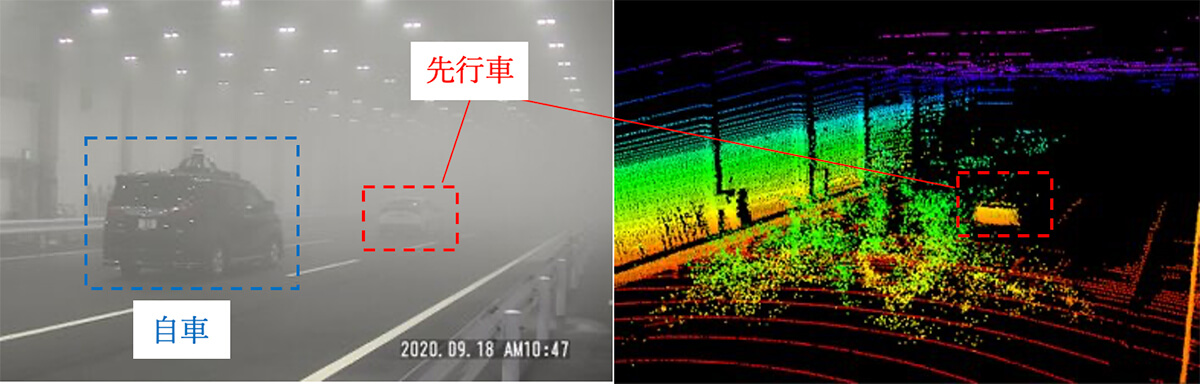
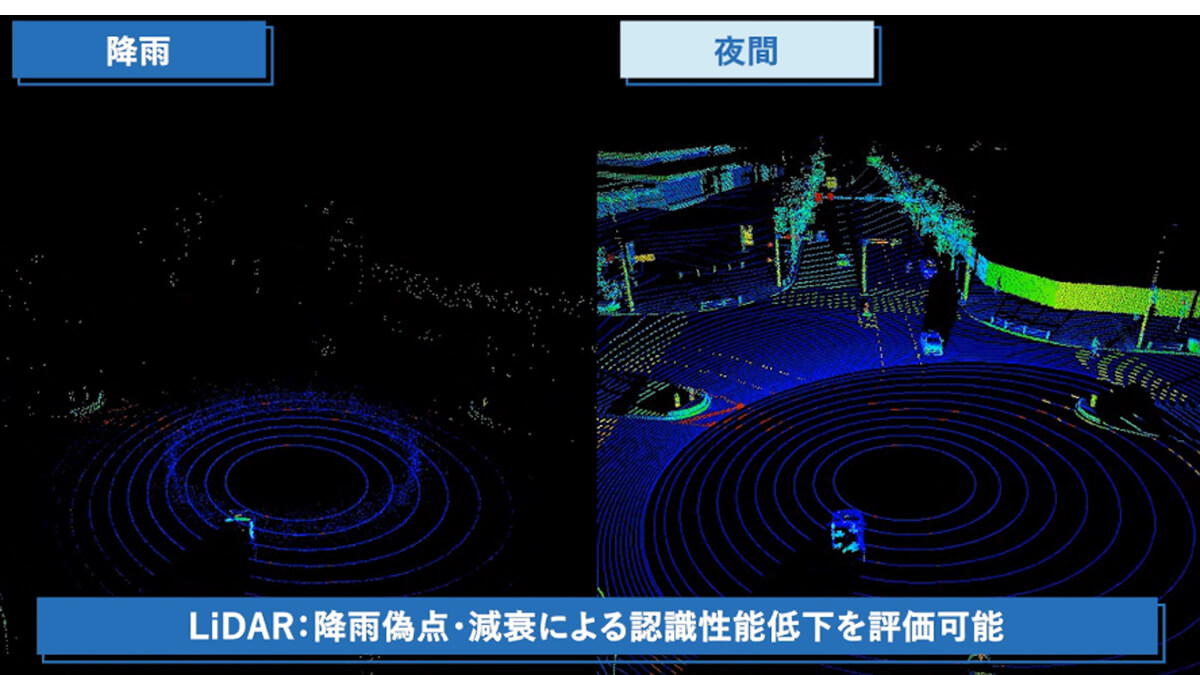
実はこれら3種のセンサは、自然現象を相手とする天候などの走行条件に対しそれぞれ物理的な弱点を持っている。一例として図6は霧の中の実測例である。カメラ画像(左図)では、先行車がかすれて見えなくなる。LiDAR画像(右図)では、空中を漂う水滴を誤検知して壁のように錯覚してしまう。図7には、LiDARの霧や雨滴などの反射点(偽点)により周りの車両物標が見え難くなる様子や、逆に近赤外光が夜間(晴天)に強い様子がDIVPシミュレータで再現できている。
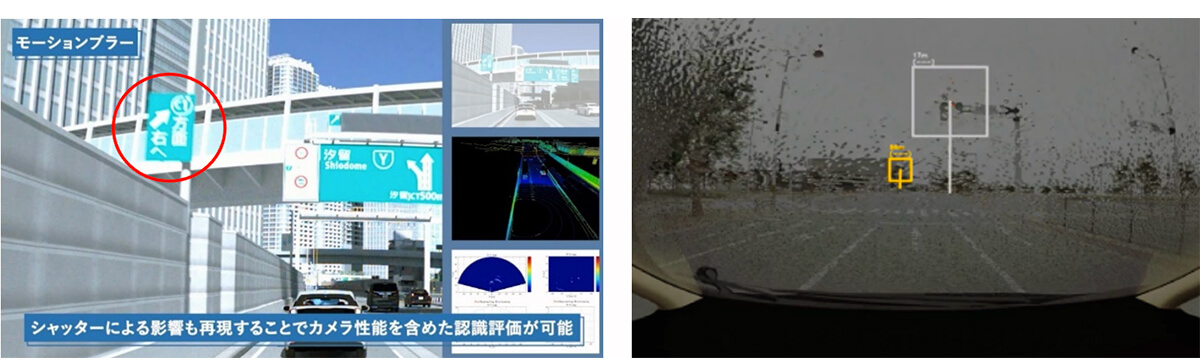
仮想空間シミュレータDIVPは、これら再現が困難な種々のセンサ検出の弱点事象までも忠実に再現しセンサや認識技術の開発に貢献できる。例として図8左は高速走行時に文字が滲む現象(モーションブラー)を再現例、また、図8右はフロントガラスへの雨滴付着を再現し信号機認識アルゴリズムの限界検証している例を示している。
次回に続く-
参考文献
- RoAD to the L4 ホームページ、https://www.road-to-the-l4.go.jp/
- Hideo Inoue, “Driving Intelligence Validation Platform (DIVP) for AD Safety Assurance”, SIP-adus Workshop 2022, Session “Safety Assurance”, 2022
https://en.sip-adus.go.jp/evt/workshop2020/ - 井上秀雄、仮想空間における自動走行評価環境整備手法の開発、2022年12月、SIP第2期 – 自動運転(システムとサービスの拡張)- 最終成果報告書(2018~2022), p108-p119
【著者紹介】
井上 秀雄(いのうえ ひでお)
神奈川工科大学 先進自動車研究所 所長/特任教授(常勤)
DIVPプロジェクトリーダー
■略歴
- 1978.3早稲田大学理工学部機械工学科卒業
- 1978.4~2016.3トヨタ自動車(株)
・BRVC室長,車両制御開発室 室長,統合システム開発部 部長,先端・先行企画室長(部長格)等を歴任. - 2013.4~現在東京農工大学 大学院工学府 機械システム工学専攻 客員教授
- 2016.4~現在神奈川工科大学 創造工学部 自動車システム開発工学科 教授
- 2017.4~(兼務)工学教育研究機構 先進自動車研究所 所長・教授
・専門;自動車工学,車両運動,制御システム工学,統合システム/統合安全,運転支援/自動運転
日本自動車技術会 代議員,編集委員,査読委員,アクティブセーフティ部門委員会 委員
■受賞
- 1992 24th FISITA Paper Award, Development of Vehicle Integrated Control System
- 1998 28回市村産業賞 貢献賞, 「VSC(Vehicle Stability System)の開発」
- 1998 31回機械振興協会 通産産業大臣賞, 「横滑り防止 車両安定性制御システムの開発」
- 2009 The US Government Award for Special Appreciation for contributions to the development and popularization, award by the National Highway Traffic Safety Administration(NHTSA) at the 21th ESV Congress
- 2016日本機械学会 交通・物流部門 業績賞