日鉄エンジニアリング(株)、三菱電機(株)、モーションリブ(株)及び慶應義塾大学は、高度な力覚の必要な作業を可能とするリアルハプティクス®を搭載した6自由度パラレルリンクロボット(以下「ヘキサロボット」)を開発した。
今回開発したヘキサロボットは、接触を伴う高度で高負荷な力覚の必要な作業と、リアルハプティクス®※1を適用した遠隔操作が可能である。これにより、産業用ロボットが普及する中でも依然として人に頼らざるを得なかった「非定型作業」を、ロボットに代替させることができる。
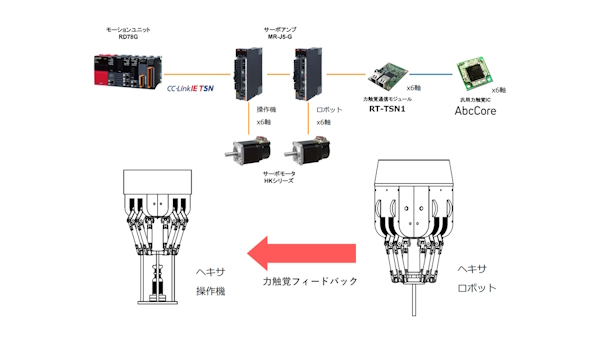
ヘキサロボットは、日鉄エンジニアリングが開発したリンク構造のアームと三菱電機製MELSERVO-J5シリーズのサーボアンプとサーボモータで構成されており、三菱電機製MELSEC iQ-Rシリーズのモーションユニットによるリアルタイム制御を実装することで、繊細かつ高応答なモーション制御(位置・速度・力)を可能にし、人の手首のような動きを実現した。また、三菱電機製産業用ロボットMELFA RV-FRシリーズを連携させることにより、接触を伴うより複雑で高度な力覚の必要な作業を可能にした。
さらに、モーションリブ製AbcCore®※2通信モジュール「RT-TSN1」を用いることで、AbcCore®とサーボアンプとのフルデジタル接続を実現し※3、ヘキサロボットと相似構造を持つヘキサ操作機でのリアルハプティクス®を適用した遠隔操作を可能にした。
遠隔操作での高度な力覚の必要な作業が可能なヘキサロボットは、モノづくりや製造業における嵌合(かんごう)、研磨、研削作業などの複雑な熟練作業への適用が期待でき、人材不足や現場作業環境の改善などの課題を解決するという。
※1 慶應大学で発明された力触覚伝送技術で、アクチュエータの力加減を自在に制御することができる技術である。この技術により、力センサレスで力触覚をともなう「遠隔操作」「計測可視化・分析」「自動化」「感触の再現・VR」が可能となる。
※2 モーションリブが開発した、リアルハプティクス®の実装を簡便にする力触覚制御ICチップ。
※3 モーションリブプレスリリース
「モーションリブ、三菱電機、日鉄エンジニアリング、慶應義塾大学の4者共同研究により、幅広い三菱電機製サーボアンプでリアルハプティクス®が利用可能」(https://prtimes.jp/main/html/rd/p/000000032.000027265.html)を参照。
ニュースリリースサイト(nipponsteel):https://www.eng.nipponsteel.com/news/2023/20231127.html