
マイクロデバイス事業部
押尾 政宏
3. ジャイロセンサーの重要特性
ジャイロセンサーには様々な特性があり、アプリケーションに応じて適切なセンサーを選択する必要がある。以下にポイントとなる重要特性についてまとめる。
3.1 アラン分散
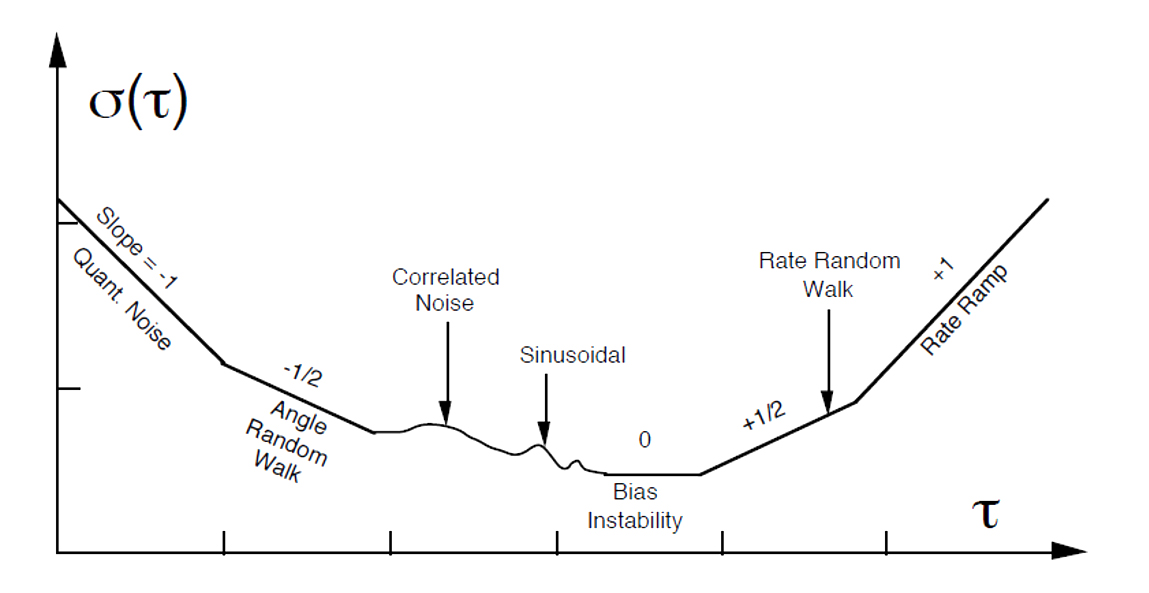
静止時の出力値(バイアス出力)を評価する指標としてアラン分散がある 1)。測定は、静止状態で長時間センサー出力を計測することで行い、アラン分散σ(τ)は、測定時間の間隔τとその時間内のセンサー出力平均値 の分散から式(3.1)の様に求める。
の分散から式(3.1)の様に求める。

図3-1はアラン分散σ(τ)と測定時間間隔τの関係を示す概念であり、ここでは詳細説明を割愛するが、1枚のグラフでセンサー出力のノイズ成分や時間変動分を表すことができる。バスタブ曲線を描き、縦軸の値が小さいほど優れたセンサーである。τ-1/2 の領域は角度ランダムウォーク(ARW: Angle Random Walk)と呼ばれホワイトノイズを表し、τ0の領域(σの最下点)はバイアス安定性(BI: Bias Instability)と呼ばれ、フリッカノイズ(1/fノイズ)と密接な関係がある。
3.2 バイアス出力温度特性
温度によるバイアス出力の変化を示す指標である。本特性が安定していると、環境温度の変化に影響されず、僅かな回転運動を検出できる。例えば、カーナビゲーション等のジャイロセンサーの角速度出力を時間積分する用途では、温度による出力変化が大きいと時間経過とともに測定誤差が積算され、車両が走行している向きを正確に測定できない。
3.3 耐衝撃・振動特性
振動や衝撃により加速度が加わった際のバイアス出力の変化を示す指標である。本特性が優れていると、外部から振動や衝撃を受けた際の影響を抑え、正確に角速度を測定できる。例えばジャイロセンサーが車両に搭載され、走行中に路上からの振動が伝わった場合、本特性が悪いと、センサー出力にノイズが発生し誤測定の原因となる。
4. ダブルT型水晶ジャイロの動作原理と特長
水晶が持つ圧電効果を応用した振動ジャイロとして、Kikuchi 2) はT型振動子を組み合わせたダブルT型構造を考案し、高精度かつ信頼性の高いジャイロセンサーを実現した。人が感じられない程の僅かな運動を検出できることや、振動・衝撃に対して影響を受けにくいといった特長をもち、カメラの手ブレ補正やカーナビゲーション、車載安全など、様々なアプリケーションに搭載されてきた。本章では動作原理と特長について説明する。
4.1 ダブルT型水晶ジャイロの動作原理
T型振動子とは、固定部からT字型の振動子が平面内に伸びた図4-1の様な屈曲振動子を言う。このT型振動子には、T字の両端が同方向に動く図4-2(a)の振動モードが存在し、これを駆動振動モードとして用いると、この振動子に面内の回転角速度(紙面垂直の回転軸)が加えられた場合、振動方向と直角をなす方向にコリオリの力が働くので、T型振動子の基部(図4-1のBase部)が屈曲する。すると、図4-2(b)の振動モードが励振され、この振動を検出することによって、振動ジャイロが構成できる。
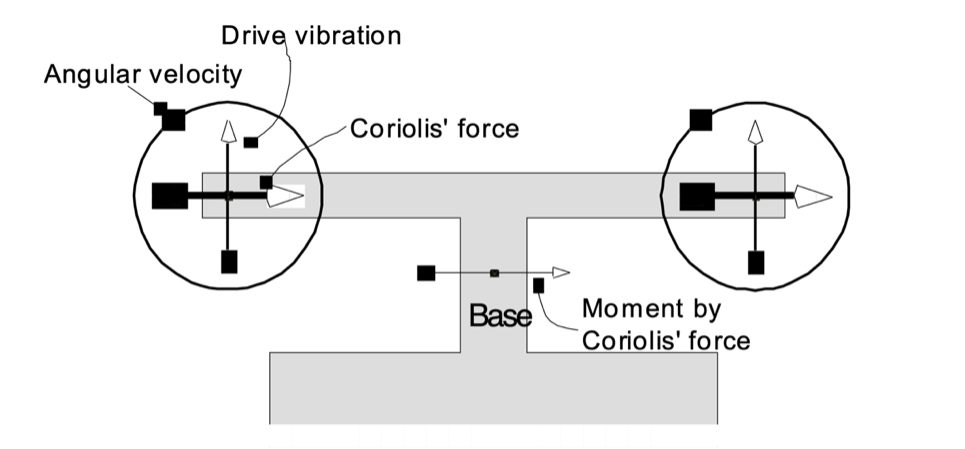
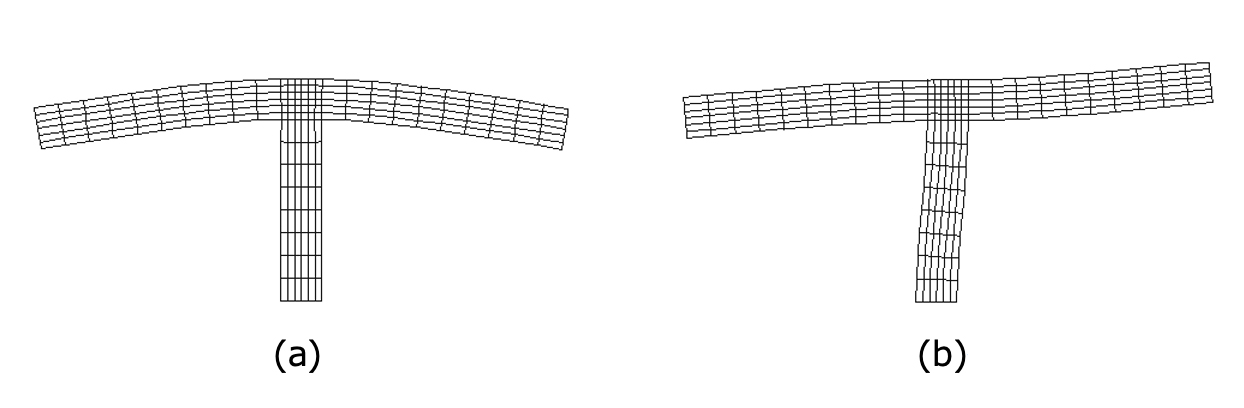
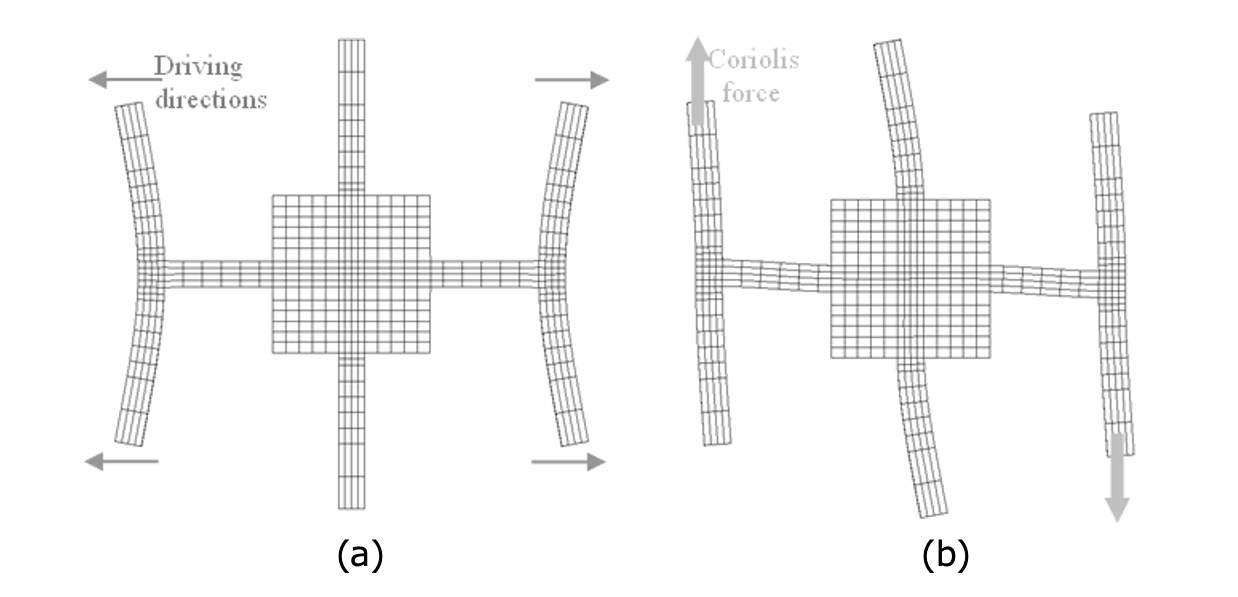
図4-3に示す様にダブルT型構造は、2つのT型振動アーム、2つの検出共振アームと中央の連結部からなっている。2つのT型振動アームは中央連結部から突き出し、更に、その対称軸線上に2つの検出共振アームを突き出した構造である。その駆動振動モードは、図4-3(a)に示す様に両方のT型振動アームが同位相で広がったり縮んだりする屈曲振動モードである。この振動子に、紙面垂直の軸に回転が加えられた場合、振動方向と直角にコリオリの力が発生するため、図4-3(b)に示す様な検出振動モードが励振される。
ダブルT型構造は、回転時にコリオリ力が2つのT型振動アームに発生し、その力を効率良く検出共振アームに伝えることができるため、感度の高い構造となっている。また、2つのT型振動アームの対称軸線上に検出共振アームが配置されているため、検出共振アームは、駆動振動モードでは振動せず、静止時の出力が安定する理想的な構造となっている。
実際の製品では、フォトリソグラフィを用いた水晶加工技術を駆使して小型化したセンサーチップ(図4-4)が使用され、重心を中央連結部1か所で支持している。このセンサーチップの振動アーム断面は三次元的に加工され、振動子の電界印加効率は格段に向上し、アームが細く小型になっても、インピーダンスが低減され、低電圧駆動が実現されている。またアームの先端にシュモクザメのような「ハンマーヘッド」を付けて、小型化しつつ感度を高めている。
4.2 ダブルT型水晶ジャイロの特長
以下に本章で説明してきたダブルT型水晶ジャイロの特長を挙げる。
① 出力のノイズや時間変動が小さい
② 温度による出力の変化が小さい
③ 振動・衝撃による出力の変動が小さい
④ 経時変化が小さく、特性ばらつきが小さい
ダブルT型水晶ジャイロはその動作原理や構造から、高感度で高いS/N比が得られるため、低ノイズで高安定な特長をもつ。図4-5にアラン分散のグラフを示す。最新製品のバイアス安定性は1゜/hを下回り、ARWは0.065゜/√hを実現している。
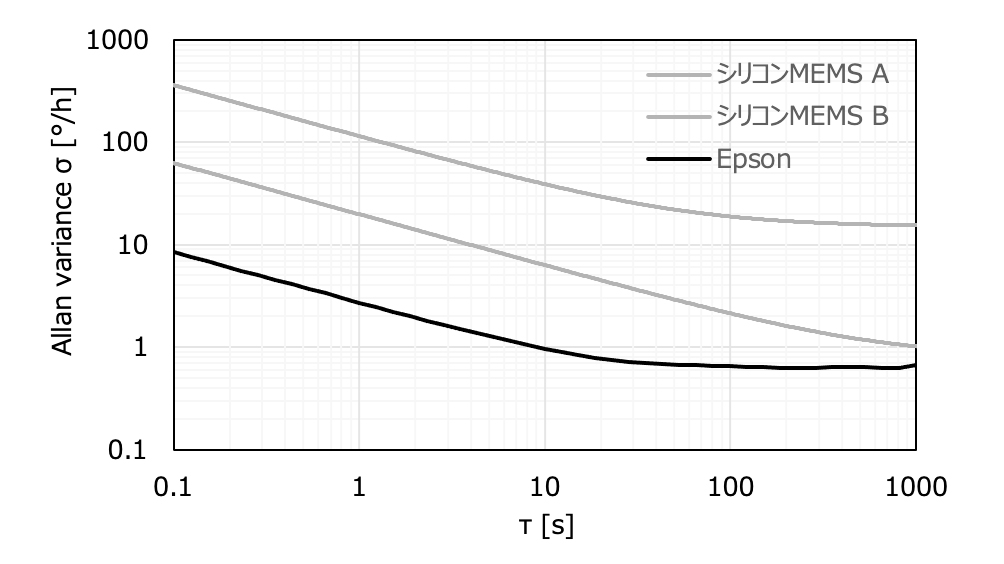
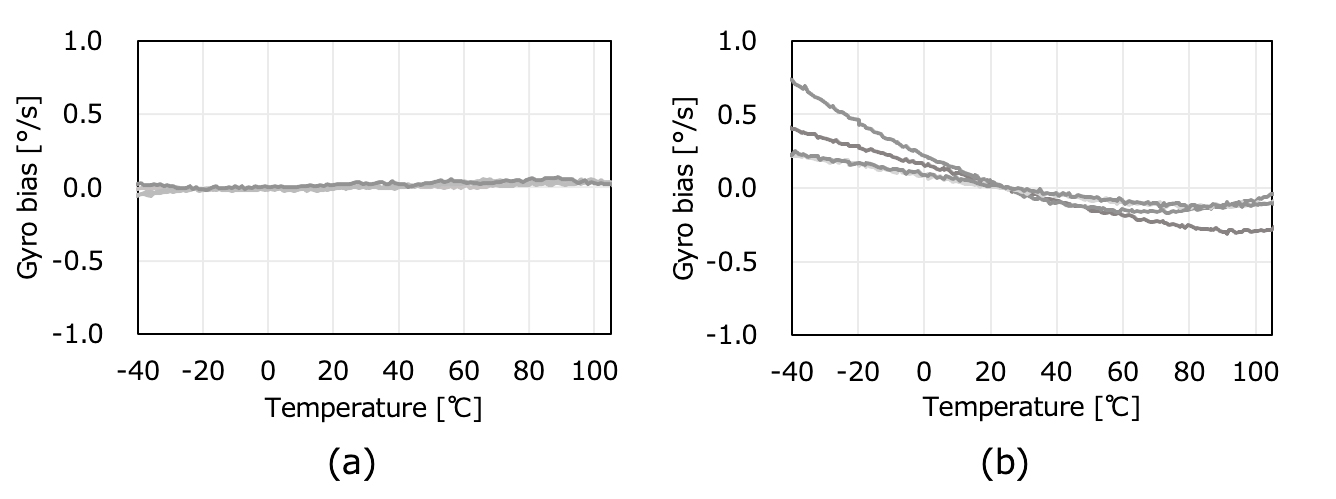
図4-6はダブルT型水晶ジャイロのバイアス出力温度特性をシリコン製の容量型MEMSジャイロと比較したグラフである。ダブルT型構造は、母材に用いている水晶の物性が安定であることや、支持系からの応力を受けにくい構造的な特徴を持っていることから安定した出力が得られている。また、センサーチップを中央連結部1点のみで支持する構造は熱応力を伝えにくく、補正が困難となる温度昇温時、降温時の出力差(ヒステリシス特性)も小さく抑えることができる。
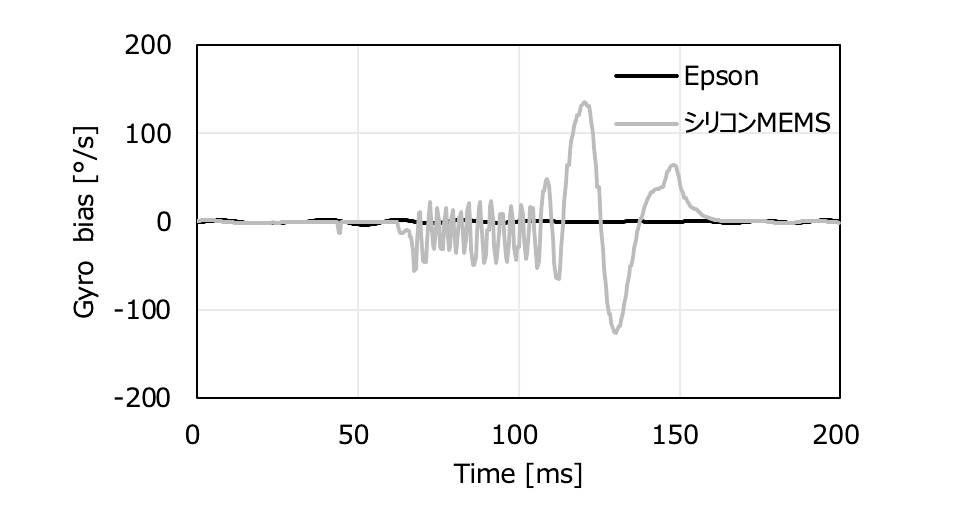
振動・衝撃の耐性に関しては、様々な評価方法が存在するが、ここでは落下衝撃試験の結果を示す。図4-7はダブルT型水晶ジャイロとシリコン製の容量型MEMSジャイロを並べ、400Gで落下させた時の衝撃応答を調べたものである。シリコンMEMSジャイロは衝撃の影響により、出力が大きく変動しているのに対し、ダブルT型水晶ジャイロの変動は僅かである。ダブルT型構造は、直線加速度を受けると2本の検出共振アームから同相信号が出力され、差動回路により信号をキャンセルできること、また、センサーチップの重心を中央連結部1か所で支持されていることにより、振動や衝撃の影響が軽減されている。
また、ダブルT型水晶ジャイロは単結晶圧電体の水晶を用いているため、材料の劣化が小さく、特性の経時変化が小さい。更に、圧電性を利用することによりシンプルな構造で駆動・検出ができることや、フォトリソグラフィを用いて加工精度が高められることで特性ばらつきを抑えられるという特長をもつ。
おわりに
ジャイロセンサーはこれまで様々なアプリケーションに用いられ、安全・安心で快適な社会の実現に寄与してきた。今後も小型で安価な振動ジャイロは、精度の向上によって応用範囲は広がっていくと考えている。特に近い将来、本格的な実用化が期待される自動運転技術には、高精度な自己位置推定技術が要求され、衛星測位システム(GNSS: Global Navigation Satellite Systems)と慣性センサーを組み合わせた手法は必須技術になると予測している 3,4)。ジャイロセンサーはこの統合システムにおいて、GNSSが苦手とするトンネル下や高層ビル、街路樹間の走行における相対的な位置推定の役割を担う。ジャイロセンサーのバイアス(若しくはオフセット)やドリフトは位置推定に大きな影響を及ぼすため、精度の高いものが望まれる。本稿で紹介した水晶ダブルT型ジャイロセンサーは精度が高いだけでなく、安全性の面でも車載用として多くの搭載実績があり、自動運転を実現する重要デバイスとして期待している。
参考文献
- IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros, IEEE Std. 952-1997.
- T.Kikuchi et al., ” Miniaturized Quartz Vibratory Gyro Sensor with Hammer-Headed Arms,” 2004 IEEE International Ultrasonics, Ferroelectrics, and Frequency Control 50th Anniversary Joint Conference, FC2-H-6, Aug.2004.
- 高野瀬碧輝, 渥美善規, 滝川叶夢, 目黒淳一, ”都市環境下で適用可能なGNSS/IMUに関する研究”, 自動車技術会論文集, Vol.51, No.4, pp.721-726, 2020.
- 瀧澤照夫, “高精度MEMSジャイロセンサ技術動向と自動運転車への応用可能性”, 技術情報協会, 自動運転車に向けた電子機器・部品の開発と制御技術, pp177-188, 2022.
【著者紹介】
押尾 政宏(おしお まさひろ)
セイコーエプソン株式会社 マイクロデバイス事業部 TD商品開発部 課長
■略歴
- 2000年電気通信大学 機械制御工学科 修士課程修了
- 2000年セイコーエプソン株式会社 入社
弾性表面波デバイスの研究開発に従事 - 2009年水晶ジャイロセンサーの開発設計に従事
- 2020年TD商品開発部 課長