(株)Thinkerは同社の取締役でもある大阪大学大学院基礎工学研究科の小山佳祐助教が独自に研究・開発した「カメラレスばら積みピッキング」を実現するロボットハンドの製品化を進めるとしている。
昨今は人手不足が深刻化する中、製造業を中心にロボットハンドが有力な対策のひとつとして注目を集めている。しかし、従来のロボットハンドの多くは、カメラによってセンシングを行うことから死角ができやすく、どうしても対処が難しい作業(もしくは事前のティーチング(※注)に大きな手間や時間がかかる作業)がいくつかあった。その中でも最も実現が渇望されているのが、ランダムに置かれた部品などのピッキング(ばら積みピッキング)である。多様なリクエストに応じた少品種・少量の生産が求められ、スピード感を要するいまのような時代には、事前のセッティングに時間がかからず、かつその場で柔軟な対応(ばら積みピッキング)ができる能力がロボットに求められるからである。
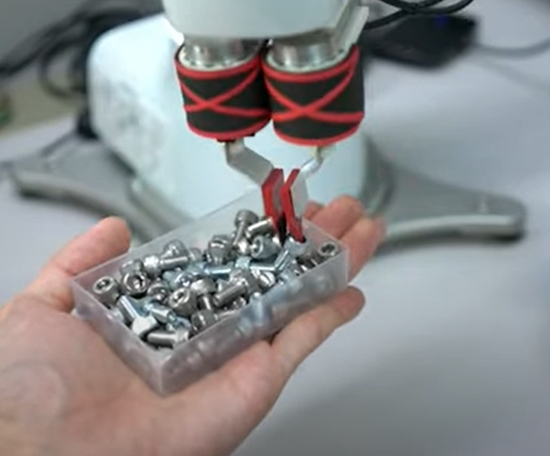
こうした社会の実情やニーズを踏まえて、Thinkerでは、7月31日より出荷を開始した「近接覚センサーTK-01」の提供に加えて、同じく近接覚センサーの技術によって「ばら積みピッキング」を実現できる次世代型のロボットハンドの開発・製品化に着手することにした。
同社の開発テーマでもある「3歳児でもできるのにロボットにはできない動作の実現」のひとつとして、2025年度の製品化を目指して取り組んでいくという。
※注・・・・・ティーチングとはロボットに作業を教え込む工程。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000013.000106143.html