
4.ITS用センサ
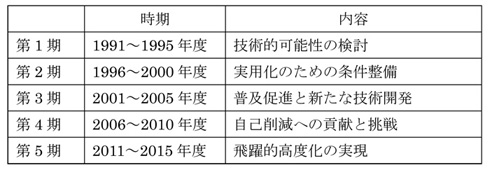
前回までで説明してきたのは主に車両の内部の状態を計測するセンサで、これらに対して車両外部の環境を認識するためのレーザレーダやカメラ(イメージセンサ)などのセンサをここではITS用センサと呼ぶこととする。ITS用センサを用いたシステムとしては走行支援のためのACCやLKAに加えて、最近では安全システムである衝突被害低減システムがあり、さらに将来の自動運転への適用も検討されている。これらのシステムについては国家プロジェクトである国土交通省によるASV(Advanced Safety Vehicle)プロジェクトにおいて自動車メーカ各社がプロトタイプカーを試作し、様々な検討が行われてきた。表3にASVの経緯を示す。現在は第5期までが終了している。これらの詳細については国土交通省のホームページを参照されたい7)。
主要なITS用センサでは外部環境情報を1次元もしくは2次元の検出素子アレイで取り込み、それらのデータを画像処理することで障害物や走路の認識を行っている。画像処理には高速演算が要求され、専用のASIC(Application Specific Integrated Circuit)やGPU(Graphics Processing Unit)が用いられている。またITS用センサは外部環境情報を得るために外界にさらす形で車体の表面に取り付ける必要があり、デザイン上や信頼性上の課題をクリアしていく必要がある。
以下では代表的なITS用センサであるレーザレーダ、ミリ波レーダ、カメラについて説明する。なお、赤外線カメラについては前回のMEMSセンサのところで赤外線イメージセンサという形で取り上げたのでここでは省略する。
4.1 レーザレーダ
レーザレーダは検出方向に存在する物体までの距離と方位を検出する装置で通常近赤外線の半導体レーザを用い、物体にレーザのパルス光を照射して反射光が戻ってくるまでの時間を計測して距離を求めるToF(Time of Flight)方式が用いられている。検出する物体の方位を求めるためにレーザ光をスキャナでスキャンし、計測を繰り返すことで反射光強度の方位分布を得ることができ、これにより画像処理を用いて検出物体のある程度の形状や大きさを求め、物体の識別を行うことができる。スキャナとしては電磁アクチュエータでミラーを駆動する1次元スキャナの他、ポリゴンミラーをモータで回転させる2次元スキャ二ングも用いられている。
4.2 ミリ波レーダ
ミリ波レーダでは波長が1 cm以下の電磁波であるミリ波を検出方向の物体に照射し、その反射波を検出することで物体までの距離と方位を求める。さらに反射波の位相を使ってドップラー効果をもとに検出する物体との相対速度も求めることができる。距離検出方式にはモノパルス方式に加えて、FM-CW(Frequency Modulated-Continuous Wave)方式や2周波CW方式などがあり、搬送周波数としては76~77 GHzが主に使用されている。FM-CW方式では搬送周波数を三角波により周波数変調し、反射信号とのビート信号をもとに物体までの距離と相対速度を同時に求める。
ミリ波のスキャ二ングは機械式スキャニングからアンテナアレイを用いた電子式スキャ二ングへと移行し、小型化が進んでいる。またミリ波用高周波回路もGaAsやSiGeを用いたMMIC(Monolithic Microwave Integrated Circuit)から微細CMOS回路へと移行し、低価格も進んでいる。ミリ波レーダはレーザレーダと比較するとビーム幅が太い分、検出分解能は低くなるが、検出の最大距離が長く、雪や霧などの悪天候の影響を受けにくいという長所がある。
4.3 カメラ
カメラは悪天候や逆光に弱く、測距精度もレーダには及ばないが、画素数が極めて多いことから画像認識技術と組み合わせることにより検出物体の詳細な形状把握と物体認識をすることができる。また2個のカメラを用いたステレオビジョンとすることで視差により物体までの距離を計算することもできる8)。可視光のカメラは通常車室内のルームミラー付近に前方を向けて取り付けられ、白線などの走路情報と障害物情報を同時に得ることができる。ITSのシステムによっては認識の信頼性を上げるためにカメラとレーザレーダもしくはミリ波レーダの情報を融合させるセンサフュージョンの技術が用いられている。
参考文献
7) http://www.mlit.go.jp/jidosha/anzen/01asv/index.html
8) 「【最新版】車載用センサ/カメラ技術と安全運転支援システム」(技術情報社)、第1章第3節 ステレオ・カメラを用いた前方認識技術と運転支援システム、pp.33-44 (2009)