
3. ドローンの高信頼化に向けたエッジ・クラウド連携のためのタスクマッピング手法
3.1 概要
ドローンに搭載された小型コンピュータでは多種多様なタスクが繰り返し実行される。機体の安全性を司るタスクに加え、さまざまなセンサ情報の処理や動画像撮影など応用に関するタスクまでその優先度や求められる制約も異なる。IoTの普及に伴い、クラウドとも連携して所望のタスクを実行することが可能となるが、通信遅延の変動により満たすべき処理時間制約を満たせないこともあり得る。本研究では、さまざまな特性を持つタスクをエッジとクラウドに適切にマッピングするタスクマッピング手法を提案した。提案手法では、与えられた通信遅延の状況に応じて必須のタスクを最優先にマッピングしつつ、影響を最小限に抑えるような最適なタスクマッピングを探索する。なお、本手法は文献[21]で発表しており詳細はそちらを参照いただきたい。
3.2 システムモデル
本研究では、次のようなエッジ・クラウドプラットフォームを想定する。タスクはデータ並列性を持ちエッジまたはクラウド上で実行できる。エッジは複数のプロセッサコアが搭載されており、クラウドは計算資源の制限はない。エッジでタスクが割り当てられると複数のプロセッサコアでタスクが実行される。エッジとクラウドは相互に通信可能であるが通信遅延を考慮する必要がある。各タスクにはデッドライン制約があり、タスクは周期的、非周期的、散発的に繰り返し実行される。タスクは設計時にエッジまたはクラウドに静的に割り当てられる。また実行時に新規のタスクが追加されることはない。
3.3 提案手法
本研究では、タスクに優先度を持たせ、クリティカルタスクは最優先で制約を満たして実行し、オプショナルタスクは可能な限り実行することで被害を最小化するタスクマッピング手法を提案する。本提案手法は先行研究である文献[22]の組込みシステム用ホモジーニアスメニーコアSoCを対象とした静的タスクマッピング手法をIoT向けに拡張した。
提案手法ではタスクは重要度とデッドライン制約の2種類の優先度をもち、全てのタスクは以下の3つに分類される。
- Category I: クリティカルかつハードデッドライン
- Category II: クリティカルかつソフトデッドライン
- Category III: オプショナルかつソフトデッドライン
Category IとIIに分類されたタスクはドローンが安全に飛行する上で重要(クリティカル)なタスクでありそのタスクは必ず実行される必要がある。Category IIIのタスクはオプショナルタスクでありシステムは必要に応じてCategory IIIのタスクを放棄することが可能である。また、デッドライン制約に関してはCategory Iのタスクはハードデッドライン、それ以外のタスクはソフトデッドラインをもつ。
本稿ではスペースの都合で詳細な定式化は割愛するが、この問題を数理計画問題として定式化することで解を求めた。入力はタスクセットとエッジ・クラウド間の通信遅延、出力はタスクのコアへのマッピング結果である。主な制約はハードデッドラインのタスクはデッドライン以内に実行される、タスクが重複してマッピングされない、などである。目的はデッドライン超過コストとタスク放棄コストの最小化である。
3.4 評価実験
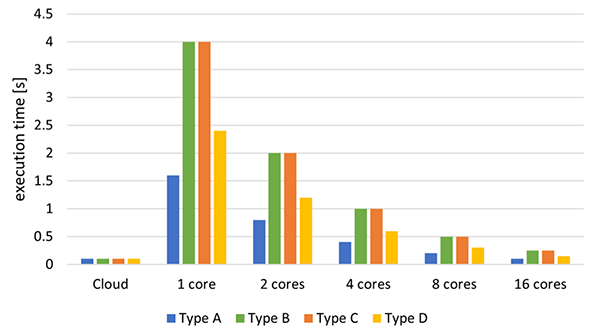
提案手法の有効性を示すために、複数種類のタスクからなるタスクセットを想定し、通信遅延を変化させた場合のタスクマッピング結果を評価した。本実験では以下の通りType A〜Dの4つの種類の合計20個のタスクを想定した。
- Type A: Category I, 5 tasks
- Type B: Category I, 1 task
- Type C: Category II, 4 tasks
- Type D: Category III, 10 tasks
また図1に各タイプのタスクの実行された場所ごとの処理時間を示す。図1はそれぞれのタスクをクラウドで実行した場合、エッジで1コア〜16コアで実行した場合のそれぞれの実行時間を示す。
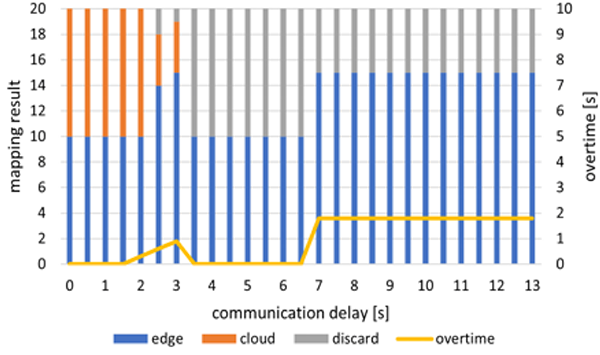
図2に実験結果を示す。X軸はエッジ・クラウド間の通信遅延時間を示している。Y軸左側と棒グラフはマッピング結果を、Y軸右側と折れ線グラフはソフトデッドラインを持つタスクのうちの最大超過時間を示している。棒グラフの青はエッジ、オレンジはクラウド、グレーは廃棄されたタスク数をそれぞれ表す。図2より、遅延時間が短い間はクラウドも活用しつつタスクが実行されるが、遅延時間が増大するにつれクラウドでの処理からエッジでの処理に移行し、実行できないタスクが放棄される結果となった。放棄されたタスクはオプショナルなタスクで、それらのタスクが犠牲になることでクリティカルなタスクの実行が可能となっている。加えてタスクのデッドラインミスが許容されるソフトデッドラインタスクの最大超過時間も遅延時間の増大によって増加していることがわかる。このように、通信遅延時間の変化により最適なタスクマッピングは異なり、エッジ・クラウド間のタスクマッピングを適切に切り替えることで、信頼性の向上に貢献できると考えられる。
3.5 まとめ
本研究では飛行前に最適なタスクマッピングを求める静的タスクマッピング手法を開発した。提案手法により通信遅延の変化により最適なタスクマッピングを求めることができた。特に、タスクの放棄を許容することでデッドラインを満たすことが可能となった。今後の課題はより実用的なタスクモデルでの評価や飛行中に適切なタスクマッピングを求める動的タスクマッピング手法の開発が挙げられる。
4. 今後の方向性
ドローンの高信頼化を実現するためには、障害物回避や自己位置推定などを駆使しつつ起こりうる様々な事象に備えることが重要である。しかし先に述べた通りドローンを取り巻く環境は多岐に渡り、事前に全ての事象に備えることは現実的ではない。特に飛行環境は想定外の事象に溢れており、想定外を如何に想定してそれに備えるかは非常に大きな課題である。
加えて想定された事象が発生した場合に瞬時に対応することは被害を最小限に収めるためにも極めて重要である。先に述べた通りIoTではエッジとクラウドの通信遅延が問題となり、クラウドで瞬時の対応が必要な処理を実行することは現実的ではない。通常エッジの計算資源は限られており、限られた計算資源で高信頼化に必要な処理を行わなければならない。
ドローンの高信頼化は決して特定の要素技術だけで実現できるものではない。エッジやクラウドの特性や求められる信頼性、考えられる事象などを総合的に捉えたアプリケーションとシステムの協調設計が重要である。高信頼化を支える新しいアプリケーションの開発に加え、そのシステム実装を行うための設計方法論も合わせて議論することで、コストや性能などのトレードオフを考慮した全体最適化が可能となる。このような分野横断的な取り組みが今後ますます重要になると考えられる。
参考文献
- J. Yoshimoto, I. Taniguchi, H. Tomiyama, T. Onoye, “Priority-aware Static Task Mapping for Edge-Cloud Collaborative Platforms,” Proc. of International Conference on Electronics, Information, and Communication (ICEIC), pp. 518-521, Feb. 2022.
- I. Taniguchi, J. Kaida, T. Hieda, Y. Hara-Azumi, H. Tomiyama, “Static Mapping with Dynamic Switching of Multiple Data-Parallel Applications on Embedded Many-core SoCs,” IEICE Trans. on Information and Systems, Vol.E97-D, No.11, pp.2827–2834, Nov. 2014.
【著者紹介】
吉本 丈(よしもと じょう)
大阪大学 大学院情報科学研究科 博士前期課程
■略歴
2020年3月 大阪大学 工学部 電子情報工学科 卒業
2022年3月 大阪大学 大学院情報科学研究科 博士前期課程修了
IoTシステムの設計技術に関する研究に従事。
谷口 一徹(たにぐち いってつ)
大阪大学 大学院情報科学研究科 准教授
■略歴
2002年3月 石川工業高等専門学校 電子情報工学科 卒業
2004年3月 大阪大学 基礎工学部 情報科学科 卒業
2006年3月 大阪大学 大学院情報科学研究科 博士前期課程修了
2007年〜2008年 Katholieke Universiteit Leuven (IMEC)にてInternational Scholar
2009年3月 大阪大学 大学院情報科学研究科 博士後期課程修了、博士(情報科学)
2009年4月〜2017年1月 立命館大学理工学部 助教及び講師
2017年2月 大阪大学大学院情報科学研究科 准教授、現在に至る
VLSI設計技術、システムレベル設計方法論、低消費電力設計技術、サイバーフィジカルシステム設計方法論、次世代アプリケーションなどに関する研究に従事。IEEE、ACM、電子情報通信学会、情報処理学会 各会員。