この度、大阪大学基礎工学研究科システム創成専攻の小山佳祐助教が開発した「近接覚センサ」を活用してソリューション提案や開発支援、プロダクト開発・販売などを行う(株)Thinker(シンカー)を設立した。
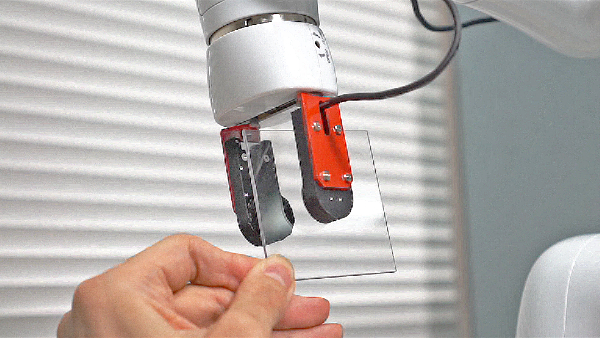
Thinkerの近接覚センサは、対象物との距離と傾きを同時に計測することができる技術。これを用いることで、瞬時にモノの大きさや形状を把握できるだけでなく、ビジュアル情報としては捉えづらい死角部分や透明物質、鏡面の計測もでき、「ロボティクスの最後の砦」とされてきたロボットマニピュレーション(※1)に革新的な進歩をもたらすことが可能となる。
Thinkerでは、まずはロボットハンドへの近接覚センサの搭載を提案。独自のAI技術との組み合わせにより、バラ積みされていたり、形が不揃いだったりするモノを、みずから感知し、考えて、ピックアップできる協働ロボット(※2)とすることで、現場への導入・普及に取り組んでいくという。
※1ロボットマニピュレーション……ロボットを用いて、何かを操作したり、取り扱ったりすること。
※2協働ロボット……人と同じ空間で一緒に作業を行うことができる産業用ロボットのこと。従来の産業用ロボットは、出力やスケール、制御などの問題から、安全柵で囲うなどして、人間と隔離した状態で用いなければならなかったが、技術の進化や法整備が進んだことなどにより、ロボットが文字どおり「人のとなりで」作業できるようになりつつある。労働力不足が叫ばれるなか、さまざまな領域・業界で協働ロボットが求められているが、導入環境の整備やロボットティーチングの手間などが課題となっている。
■近接覚センサの概要
「近接覚」は、視覚とも触覚とも異なるモノの認知方法で、見たり、触ったりせずに認知することから「人間にはない感覚」とされている。大阪大学の小山佳祐助教の技術シーズを基にしたThinkerの近接覚センサは、対象物との距離と傾きを同時に計測可能。独自の高速・高精度AI技術と組み合わせることで、従来の産業用ロボットでは難しいとされていた現場に応じた臨機応変なピックアップや、ティーチング負担の軽減を可能にする。
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000001.000106143.html