
海上技術安全研究所
中條 俊樹
3.水槽模型試験の例
3.1 一点係留型浮体の水槽試験
当所で実施した大縮尺の水槽試験の例を紹介する。ここで示す水槽試験は、2016年度から2017年度にかけて実施された、「風力発電等技術研究開発/洋上風力発電等技術研究開発/次世代浮体式洋上風力発電システム実証研究(要素技術開発)」において実施されたものである7)。ここでは、浮体コンセプトの設計の安全性の確認、浮体建造方法や建造コストの試算が行われた。その中で著者らは縮尺1/15、1/30の大型模型を用いた水槽試験を実施し、数値計算手法や設計の妥当性を検証した。なお、1/15の水槽試験では実海域再現水槽を、1/30の水槽試験では海洋構造物試験水槽をそれぞれ用いた。
| Part | Item | Value | Remarks |
|---|---|---|---|
| Wind turbine | Power generation | 6 MW | |
| Number of blades | 2 | Downwind type | |
| Rotor diameter | 140 m | ||
| Hub height | 112 m | ||
| Floater | Length | 90 m | |
| Breadth | 93 m | ||
| Depth | 35m | ||
| Draft | 15m | ||
| Mooring | Number of lines | 6 | Turret at a windward column |
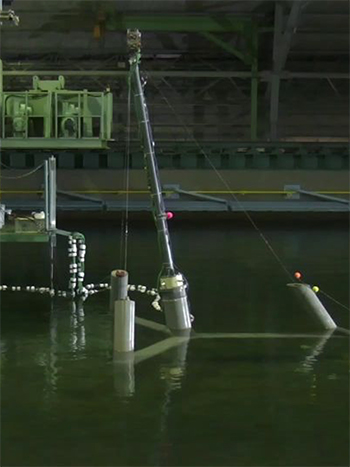
(海洋構造物試験水槽)
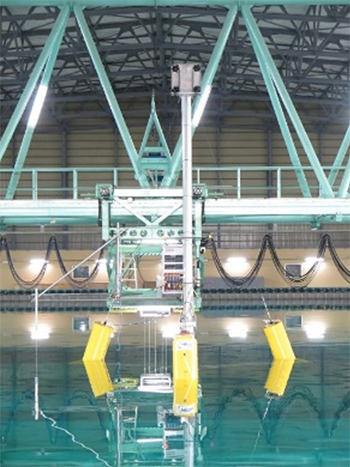
(実海域再現水槽)
水槽試験では、浮体が風上側のコラム下に設置されたタレットを中心として、風向変化に追随するための回転運動をすることから、浮体運動の計測には非接触式の光学式運動計測装置が用いられた。また、必要な送風範囲を発生可能な送風装置を用いることが困難だったため、いずれの試験においても風車のスラスト荷重は、電動ダクテッドファンを組み合わせた模擬風車を作成し、その発生するスラストの反力を風車の発生するスラストとしている。
3.2 ブレード・ピッチ制御可能な風車模型
浮体式洋上風力発電に搭載される風車も、陸上設置型や着床式洋上風力発電と同様に、ブレードのピッチ角を風速に合わせて制御することで発電量の最大化や高風速時の風荷重低減を図っている。しかし、浮体式洋上風力発電においては浮体の動揺による相対風速の変動により、一般的なブレード・ピッチ制御によってネガティブダンピングと言われる浮体運動の増幅現象を発生する可能性があることが知られている8)。浮体式洋上風力発電においては、発電量の最大化と浮体動揺の低減を両立する制御が求められ、著者らもこれまで研究開発を実施している9)。
風速は高度が上がると大きくなることが知られているが、前述の通り、風車の大型化により、ブレードに入射する風速は、ロータ上部と下部では大きな差が生じていることが考えられる。著者らは、このような大きな風速差に対応したブレード・ピッチ制御アルゴリズム開発のため、風洞試験を中心に研究を実施している。その一例として、3本のブレードを独立して制御可能な風車模型を紹介する。これまで著者らは、浮体式洋上風力発電のブレード・ピッチ制御を再現可能な風車模型を浮体模型に搭載して水槽試験を実施してきたが、3本のブレードを独立して制御可能な風車模型を開発した10)。その概要を以下に示す。
従来の模型は、モータ駆動をギアで直線運動へと変換し、スリップリングでハブへ伝達し、そしてハブ内部のギアで3枚のブレード基部の回転に伝達する構造である。この方式は、3本のブレードを同時に制御する方式では十分に軽量であったが、3本のブレードを独立して制御する場合には、機構が複雑化かつ大型化し、浮体式洋上風力発電の相似則から大きく外れるものとなった。そこで、新たに風車模型のハブ内にブレード・ピッチ制御のための小型サーボモータを内蔵する模型を開発した。この模型はナセルとハブ合わせて約0.75kgと、総重量の大幅な削減に成功した。今後はこの模型を用いた水槽試験も実施可能となった。
なお、各ブレードの動作はブレード基部に設置した小型サーボモータを用いて直接動作させるが、各モータの指令値、出力値は無線通信(ZigBee)を用いて外部コントローラと受け渡す方式である。このとき、指令入力用と動作出力用の2系統非同期無線を採用することで、安定した信号の授受を可能にした。また、無線通信による制御は、試験の自由度の向上と模型重量の低減に大きく寄与している。
4.おわりに
模型試験は、数値計算ではモデル化が困難な現象の再現や数値計算で見落としやすい現象の確認に有用であり、数値計算環境が発達した現状においてもその意義は失われていない。しかしながら、検討対象となる風車が大型化する中で、試験水槽の制約もあり縮尺模型は想定実機の大型化に対応出来ていない。
このような状況下において、これまでよりも小さな縮尺で想定実機の挙動を再現可能な縮尺模型が必要であり、そのためにはセンサーに加え、可動部や制御系の小型化と非接触化が極めて重要となると考えられる。
参考文献
- 中條俊樹、タレットを用いた一点係留方式の浮体式洋上風力発電について、海洋エネルギーシンポジウム、2021.
- 中條俊樹、南 佳成ら、浮体式洋上風力発電のブレード・ピッチ制御の効果に関する実験的検討、第34回海洋工学シンポジウム講演論文集、2012.
- 中條俊樹、羽田 絢ら、大縮尺模型を用いた浮体式洋上風力発電の水槽試験、第27回海洋工学シンポジウム講演論文集、2018.
- 羽田 絢、中條俊樹ら、浮体式洋上風力発電施設の加振が後流に及ぼす影響に関する実験的研究、風力エネルギー利用シンポジウム論文集、2020.
【著者紹介】
中條 俊樹(ちゅうじょう としき)
(国研)海上・港湾・工区技術研究所 海上技術安全研究所
洋上風力発電プロジェクトチーム チームリーダー
(兼)海洋先端技術系再生エネルギー研究グループ グループ長
■略歴
2008年 独立行政法人 海上技術安全研究所入所
2011年 同 主任研究員
2020年 洋上風力発電プロジェクトチーム チームリーダー
2021年 海洋先端技術系再生エネルギー研究グループ グループ長
海洋構造物、特に浮体式洋上風力発電の波浪中応答評価、安全性評価に従事。