
江刺 正喜
3.光スキャナ式画像センサ(センサ+アクチュエータ)
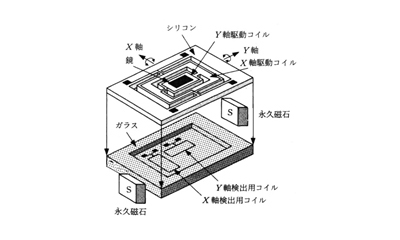
アクチュエータを組み合わせたセンサの例として光スキャナ式画像センサを紹介する。図8に電磁駆動による2軸光スキャナの構造を示す9)。シリコンのジンバル構造に駆動用コイルと鏡が形成されており、電流を流したコイルと外部の磁石の間に働く電磁力により鏡を2方向に偏向させることができる。なおこのセンサではガラス上の検出用コイルで鏡の向きを検出することも可能である。
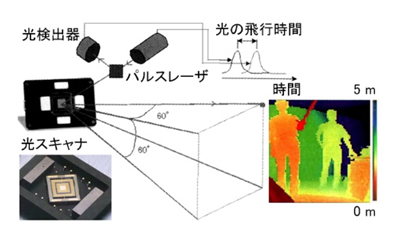
この2軸光スキャナは、3次元的な距離画像センサ(レンジイメージャ)として用いられている。図9にその原理を示すが、光は1nsで30cm進むため、パルスレーザの光が対象で反射されて戻るまでの飛行時間から、対象までの距離を知ることができる。レーザ光をスキャンし反射してきた光を検出するのを電磁駆動2軸光スキャナを用いて行うことにより、距離画像を得ることができる10)。図9中に示す画像の色が距離に対応している。このシステムは東京の山手線の駅に設置されているプラットフォームドアに用いられており、飛び乗る人などを検知し事故を防ぐのに役立っている。なおこのレンジイメージャは、これからの自動車の自動運転に必要なLIDAR(Laser Imaging Detection and Ranging)としても開発されている。このシステムの場合は、光スキャナを通して戻ってきた光を検出するため、背景光の影響を受けにくい。
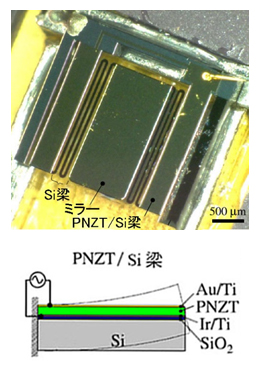
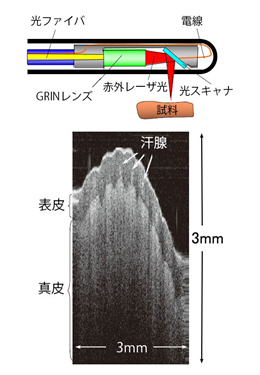
以上のような電磁駆動以外に、静電駆動や圧電駆動などを用いた光スキャナも開発されている。図10は圧電薄膜をアクチュエータに用いた圧電駆動光スキャナの写真である11)。チタン酸ジルコン酸鉛(PZT)にNbを添加したPNZT薄膜を、シリコンの梁に3μm厚でスパッタ堆積により形成してあり、薄膜の上下の電極に電圧を印加すると、シリコン梁が曲がってばねで接続されたミラーを共振駆動することができる。なおこのばねに圧電薄膜を形成し、圧電センサとしてミラーの動きを検出することも行っているが、これによって共振状態に制御することが可能になる。このミラーは図11のような内視鏡型のOCT(Optical Coherent Tomography)プローブに用いられている。OCTは眼の断層画像を撮るのに使われているものであるが、この内視鏡型プローブの場合は、Swept-Source OCTと呼ばれるレーザの波長を変化させて異なる深さの情報を得る方法を用いた。これには波長可変の速度に対し、遅い速度で鏡を動かす必要があり、100Hz程度の低い共振周波数になるようにして用いている。図11の下はこれによって得られた指先の断層像であるが、写真の左右方向をスキャンするのにこのスキャナを使用する。
4.静電浮上回転ジャイロ(センサ+回路+アクチュエータ)
高精度に2軸の角速度や角度を検出できる静電浮上回転ジャイロが1952年にイリノイ大学で開発された12)。その構造を図12に示してある。原子力潜水艦の場合に、水中では人工衛星からのGPSの電波を受信できないが、この静電浮上回転ジャイロを用いることによって高精度な航行制御が可能になった。この場合直径5cm程の金属球が、浮上用電極との間の静電容量と外部コイルによる共振特性を利用した受動回路により真空中で浮上する。球の重心は中心から僅かにずれて偏心しており、それを利用し毎分12,000回転させる。
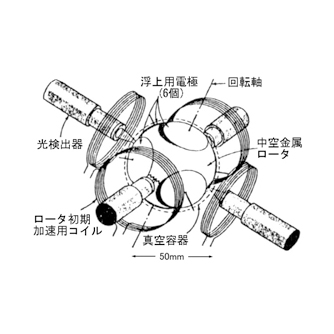
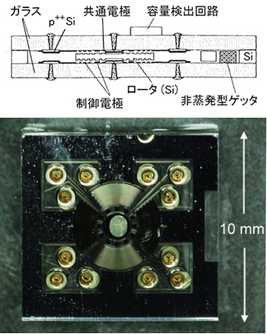
図13はMEMS技術で開発されたディスク型静電浮上回転ジャイロである13)。シリコン板の上下にガラス板が陽極接合してあり、内部で直径5mmの円盤が浮上して回転する。空気の粘性による摩擦を無くするため内部を真空にしている。このために真空中で接合し、また接合時にガラスが分解して発生する酸素ガスを吸着する目的で非蒸発型ゲッタを入れてある。ガラスの内側に電極を形成してあり、円盤と電極との間の静電容量から円盤の位置を検出し、電極に電圧を印加して静電引力を発生させる。これを全方向で行って円盤を浮上・回転させる。回転速度は毎分10,000回転で、浮上のための電圧から3軸加速度、また円盤の回転軸に垂直な2軸の角速度を測定できる。しかしこの構造では円盤を横方向に動かすのに、電極の重なりを変化させる静電アクチュエータを使用しているため大きな駆動電圧(±30V)が必要である。そのためこれを改良したリング型静電浮上回転ジャイロが開発し実用化された。
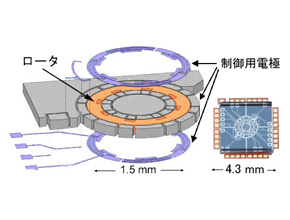
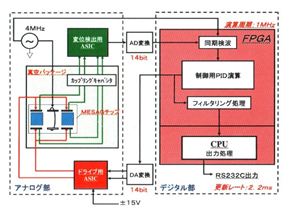
リング型静電浮上回転ジャイロは図14に示すように外径1.5mmのシリコンリングが浮上し、毎分74,000回転する14)。これは真空にしたパッケージに入れて使用される。電極間隔が変わる方向に静電引力を発生させることで、駆動電圧を減らすことができる。このリング型静電浮上回転ジャイロの制御回路には、図15に示すような高速ディジタル制御を使用する。加速度検出と角速度検出の分解能は、それぞれ2μm/s2、0.01deg/sで高い性能を示す。このようにMEMS技術で小形化し、静電容量型センサやディジタル制御および静電アクチュエータを組み合わせている。
このリング型静電浮上回転ジャイロは、高速ディジタル制御を用いるため消費電力が大きく携帯機器などには適していない。また高速回転で使うために立ち上がりに時間がかかる欠点があり自動車などにも使いにくい。このため東京の地下鉄などの走行中の車体の動きを計測する、モーションロガーに使用されている。
5.触覚センサネットワーク (センサ+ネットワーク)
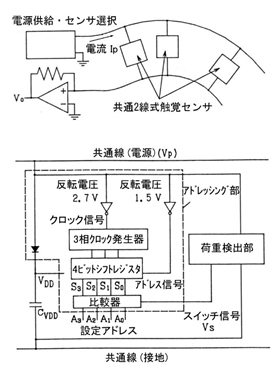
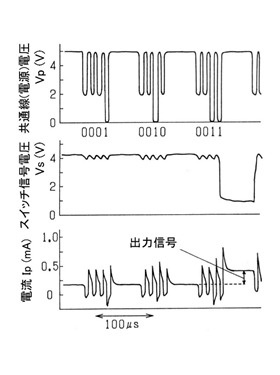
工業用ロボットは使われるが、介護ロボットはあまり使われない。これはロボットが接触したことを認識できずに危険であり、人と一緒に活動しにくいためといえる。これを解決するためにロボットの体表面に触覚センサを分布させる研究を行ってきた。図16の上は1990年に開発した共通2線式触覚センサネットワークである15)。2本の線に複数の触覚センサが接続されており、共通線は電源供給だけでなく、触覚センサを選択したり、流れる電流(Ip)からその情報を読み出したりする働きがある。図16の下には触覚センサの構成、図17には実際の動作例を示した。共通線の電圧を図17の上のように変化させて特定の触覚センサを選択する。図16下のようにクロック信号とアドレス信号を取り出し、アドレス信号を4ビットのシフトレジスタに入れる。これを設定アドレスと比較して一致すればスイッチ信号(Vs)で、その触覚センサが選択され、荷重に対応して電流Ipが変化して、出力信号が得られる。これをそれぞれのセンサに対して繰り返す。このように一つずつ読み出すシステムは「ポーリング」と呼ばれるが、その欠点はリアルタイムで無いことである。本来はロボットが接触したことをリアルタイムで検出する「イベントドリブン」であることが望ましい。当時研究室でCMOS集積回路を自前で製作していた16)。しかしその集積度は1000トランジスタ(Tr)/チップが限界であった。1990年当時でも企業では100万Tr/チップであり、我々の研究室の1000倍であった。現在では100億Tr/チップであり、100万倍の違いがある。このため我々は、1990年以来CMOS集積回路を自前で製作することを断念した。
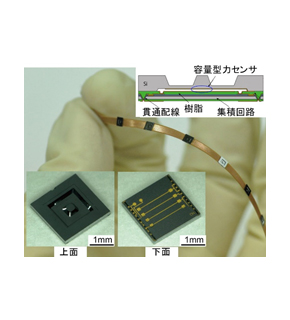
その後はLSIファウンダリに依頼して製作した高集積CMOSLSIを用い、「イベントドリブン」の触覚センサネットワークを開発している。これでは図18のように、2mm角のネットワーク用集積回路の上に容量型力センサがあり、触覚としての力による静電容量変化を検出する。集積回路からは貫通配線を通して裏面に接続されたフレキシブル基板の共通バスに接続されている17)。この触覚センサネットワークの動作例を図19に示してある。4本の共通バスは電源線(VDD,GND)と信号線(SIG+,SIG–)からなり、インターネットなどと同様なパケット通信ネットワークを形成している18)。すなわち接触を検出したセンサは、そのアドレスや荷重データのパケット信号を送出する。45MHzのクロックでこれを高速に行う、リアルタイムのシステムになっている。数十のセンサがつながった共通バスはリレーノードに接続され、複数のリレーノードからロボットのホストPCに割り込みが生じて、接触が検知される。リレーノードは接触で始まる非同期信号からクロック信号を生成する機能などを有している。

※この記事はセンサイト2018年7月号で掲載したものを再編集して公開しております。
参考文献
9) N.Asada,H.Matsuki,K.Minami and M.Esashi,Silicon micromachined two-dimensional galvano optical scanner,IEEE Trans.on Magnetics,30,6(1994)4647-4649
10) 石川智之,猪俣宏明,MEMS技術とレーザ計測技術の融合 MEMS光スキャナ「ECO SCAN」を用いた測距センサ,日本信号技報,33,1(2009)41-46
11) T.Naono,T.Fujii,M.Esashi and S.Tanaka,Large scan angle piezoelectric MEMS optical scanner actuated by Nb doped PZT thin film,J.Micromech.Microeng.,24,1(2014)015010(12)
12) H.W.Knoebel,The electric vacuum gyro,Control Engng,11,2(1964)70-73
13) K.Fukatsu,T.Murakoshi,K.Minami and M.Esashi,Measurements of electrostatic force and capacitance for electro-statically levitating inertia measurement system,Technical Digest of the 15th Sensor Symposium(1997)39-42
14) T.Murakoshi,Y.Endo,K.Fukatsu,K.Sigeru,S.Nakamura and M.Esashi,Electrostatically levitated ring-shaped rotational-gyro/accelerometer,Jpn.J.Appli.Phys.,42,Part1 No.4B(2003)2468-2472
15) S.Kobayashi,T.Mitsui,S.Shoji and M.Esashi,Two-lead tactile sensor array using piezoresistive effect of MOS transistor,Technical Digest of the 9th Sensor Symposium(1990)137-140
16) 江刺正喜,「半導体集積回路設計の基礎」(1986) 培風館
17) M.Makihata,S.Tanaka,M.Muroyama,S.Matsuzaki,H.Yamada,T.Nakayama,U.Yamaguchi,K.Mima,Y.Nonomura,M.Fujiyoshi and M.Esashi : Integration and packaging technology of MEMS-on-CMOS capacitive tactile sensor for robot application using thick BCB isolation layer and backside-grooved electrical connection,Sensors and Actuators A,188(2012)103-110
18) 室山真徳,巻幡光俊,中野芳宏,松崎栄,山田整,山口宇唯,中山貴裕,野々村裕,藤吉基弘,田中秀治,江刺正喜,ロボット全身分布型触覚センサシステム用LSIの開発,電気学会論文誌E,131,8(2011)302-309
【著者紹介】
江刺 正喜(えさし まさよし)
東北大学 名誉教授
■略歴
昭和46年東北大学工学部電子工学科卒。51年同大学院博士課程修了。
同年より東北大学工学部助手、56年助教授、平成2年より教授となり、現在名誉教授。
東北大学 マイクロシステム融合研究開発センター(μSIC)センター長。
半導体センサ、マイクロマシニングによる集積化システム、
MEMS(Micro Electro Mechanical Systems)の研究に従事。
受賞:
電子通信学会業績賞(昭和55年)、日本IBM科学賞(平成5年)、SSDM Award(平成13年)、第3回産学官連携推進会議文部科学大臣賞(平成16年)、紫綬褒章(平成18年)他