
リージョナルマーケティング
高松 創
1 はじめに
バイタルセンシング技術は、多くのセンサ方式が提案されている。特にヒトを対象としたバイタルサインモニタリング(VSM)は、従来の医療機器としての利用から、未病や高齢者介護などのモニタリングへの応用が広がりつつあり、それに伴い、研究開発が盛んに行われている分野である。
身近なアプリケーション例としては、スマートウォッチなどが普及している。心拍数(最近は心電も取得可能な製品も存在)、歩数、皮膚温度などのバイタルサインを継続的にモニタリングすることが可能となり、個人の健康管理だけでなく、医療分野での応用(1)も行われ、注目を集めている。
しかしながら、スマートウォッチで使用されている多くのセンサ(表1)は、利用者の皮膚に常に密着しておく必要があり、これが負担となって継続的なモニタリングが難しいケースも多く存在する。
表1 スマートウォッチに搭載されているバイタルセンサ
| 対象バイタルサイン 使用センサー技術 | |
|---|---|
| 心拍、酸素飽和度 | 光学式心拍センサ(PPG) |
| 心電 | 心電センサ(ECG) |
| 体組成/体脂肪 | 生体インピーダンスセンサ |
| 体温 | 温度センサ |
| 睡眠/活動量 | 加速度、角速度、重力センサ |
このような背景もあり、近年はモニタリング対象者に負担の無い、非接触によるバイタルセンシング技術の研究や製品化が進んでおり、そこで使用されるセンサも多様化(表2)している。本記事では、非接触型バイタルセンサの中で、特にマイクロ波/ミリ波センサについて説明をしていく。
表2 主な非接触型バイタルセンサ方式
| センサー方式 | 特徴 |
|---|---|
| カメラ | 画像処理で体表(顔面)の血流変化から心拍を推定 |
| ToF | 胸部の動き検知から呼吸を推定 |
| レーダー(マイクロ波/ミリ波) | 体表の呼吸と心拍の動き検知から、心拍と呼吸を推定 |
| レーダー(ミリ波/テラヘルツ波) | 人体の黒体放射の検知から体温を推定 |
2 マイクロ波/ミリ波センサ
マイクロ波/ミリ波センサは、一般的にはレーダーと呼ばれており、その技術は75年以上も前に誕生した原理自身は古いものである。第二次世界大戦時に、航空機・船舶用に実用化が進み、その技術も大きく進化した。現代では軍用に限らず、民間の航空・船舶管制、気象、速度検知(スピードガン)、ADAS(先進運転支援システム)、AD(自動運転)など多くの民生アプリケーションでの利用が広がっている。
どのようなアプリケーションにおいても、レーダーの基本原理は同じで、送信機から発射された電磁波が対象物に当たり、反射した電磁波を受信増幅して、専用の信号処理アルゴリズムを適用することにより、対象物の距離、速度、大きさなどを検知する(図1)。なお、一般的に産業用途で使用されるレーダーは自身が信号を発信し、自身で反射信号を受信するが、自身が信号を発信しない、第三者の発信した信号を利用するバイスタティックレーダーや、黒体放射(温度を持つ物体から放射される微弱電磁波)を受信するパッシブレーダーなども存在する。

3 マイクロ波/ミリ波による非接触型バイタルセンシング
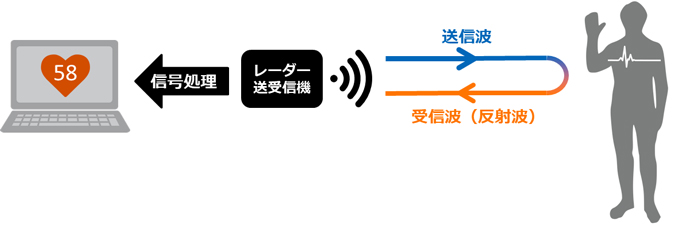
マイクロ波/ミリ波によるバイタルセンシング(以下レーダーVSM)の原理は、これまで説明したレーダーと同様に、センサが電磁波をヒトに送信(放射)し、体表で反射した後、センサが受信した反射波に含まれるバイタル情報を信号処理で抽出している。(図2)
レーダーVSMの原理は、歴史的には1979年のIEEE Transactions on Microwave Theory and Techniquesにて、J.C. Linがマイクロ波で心拍を測定できることを報告(2)しており、昔からその可能性は知られていて、現在も多くの研究論文が提出されている。近年は半導体の集積技術や微細化が進み、ADASレーダーのようなアプリケーションが普及し、そこで使われたレーダーMMICが誰でも利用できるようになった背景もあり、レーダーVSMの研究開発が活発になってきている。
バイタルセンシング技術では、医療機器として確立された技術が既に存在しており、そのデータは医学的な信頼性も高いものである。一方、レーダーVSMはアプリケーションとしては新しい技術で、現在はモニタリング用途で使用されることにとどまっているが、より高精度なバイタルセンシング信号処理アルゴリズム研究が進んでおり、将来は医療器としての利用も期待されている。
表3に、従来のバイタルセンシング技術とレーダーVSMの比較を示す。レーダーVSMは体表に生じる心拍と呼吸由来の微小変位を測定しているため、心拍と呼吸の両方を非接触で測定することが可能である。また、電波が衣服を透過するため、対象者の特定の負荷を要求することが無い。さらに、レーダーが得る情報はカメラのように個人を特定する個人データを得ることができないので、プライバシーに注意が必要な場所(例えば浴室)でのモニタリングも可能である。
表3 レーダーVSMと従来のバイタルセンシング技術の比較
| レーダー | オプティカル(PPG) | エレクトロード(ECG) | |
|---|---|---|---|
| 測定物理量 | 体表の微小変位 | 体組織の吸光度 | 体組織内の電気信号 |
| 非接触センシング | 可能 | 不可 | 不可 |
| 常時モニタリング (ストレスフリー) |
極めて良い | 良い | 悪い |
| 心拍数検知 | 可能 | 可能(医療器レベル) | 可能(医療器レベル) |
| 呼吸数検知 | 可能 | 不可 | 可能 |
| 位置検知 | 可能 | 不可 | 不可 |
| 体動補償(エラー値補正) | 要アルゴリズム開発 | 要アルゴリズム開発 | 要アルゴリズム開発 |
| 複数対象の測定 | 可能(要MIMO方式) | 不可 | 不可 |
| 耐環境性 (測定性能への影響要因) |
極めて良い | 普通(環境外乱光) | 普通(発汗) |
| 服や布団の透過 | 可能 | 不可 | 不可 |
4 FMCW方式によるレーダーVSMの実現
以降では、アナログ・デバイセズによる、レーダーVSM機器の開発事例とそこで得られるデータの特徴などを見ていく。先ずは、今回採用したレーダー方式の説明をし、その後、実機を使った実験結果を説明する。
レーダーは、その信号処理方法により、複数の方式が提案されている。ここでは、私たちが採用した、ADASレーダーなどでも使用される、FMCW(のこぎり波)方式について説明する。他にも、FMCW(三角波)パルス方式、CW方式などが普及しているが、ここでは説明を割愛させて頂く。
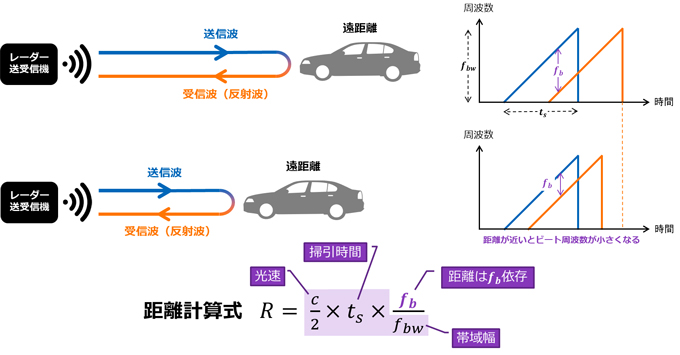
FMCW(のこぎり波)方式は、送信信号の周波数を掃引(スイープ)している。この送信波が対象から反射して戻ってきた受信波と、自身が発した送信波の周波数差から距離が分かり、複数掃引波の位相変化から速度が分かる。なお掃引信号をFMCWレーダーでは、チャープ信号(チャープは鳥のさえずりの意味)と呼んでいる。
図3に、青色の送信波、オレンジ色の受信波があり、送信波と受信波の周波数差をビート周波数(fb)と呼ぶ。FMCW(のこぎり波)方式のレーダーは、このビート周波数を見ることで、距離と速度が分かる。図3から分かるように、レーダーと車の距離が遠い場合と近い場合ではビート周波数が変化し、この結果、ビート周波数から距離を算出することが可能になっている。
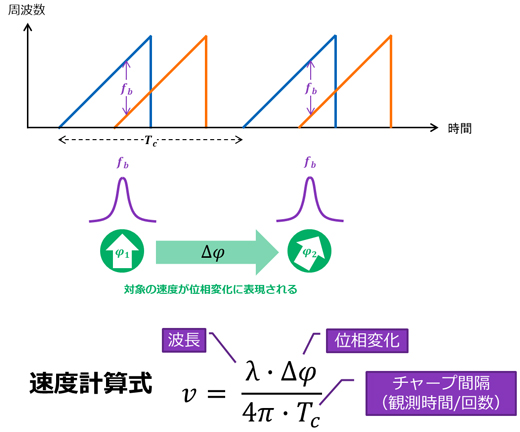
速度は図4に示すように、複数のチャープ信号のビート周波数の位相変化から算出が可能である。FMCW(のこぎり波)方式のレーダーVSMは、この速度情報からバイタルセンシングを実現している。また、この速度は体表に生まれる呼吸と心拍由来の速度を意味している。
レーダーVSMにおいて、距離情報ではなく速度情報を使う理由は、そこで得られる分解能による。一般的にレーダーの距離分解能は占有帯域幅依存で、これは電波法などの規制によって決まる。一方、速度分解能は観測窓時間依存なので、占有帯域幅に依存することなく、高分解能化が容易である。ここで観測窓時間は複数のチャープ信号数を意味しており、高速チャープ送信を行うことで、速度分解能を上げることができる。
特に、ヒトの体表に発生する心拍由来の振動は、振幅が1mm以下の微小な振動(3)になる。これは、今日もっとも高精度なミリ波レーダーの距離分解能(79GHzミリ波レーダーで約4cm)でも測定が困難であり、レーダーVSMでは速度で測定を行うことが一般的である。
・距離分解能:占有帯域幅に依存
・速度分解能:観測窓時間(=複数のチャープ信号時間)に依存
5 外乱ノイズの除去と複数人同時計測
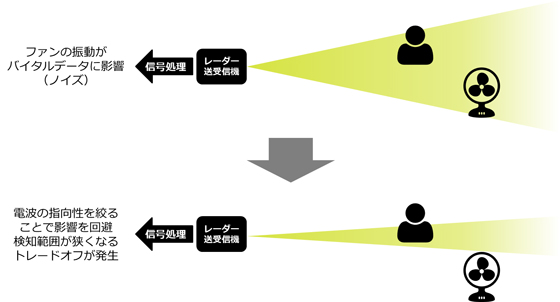
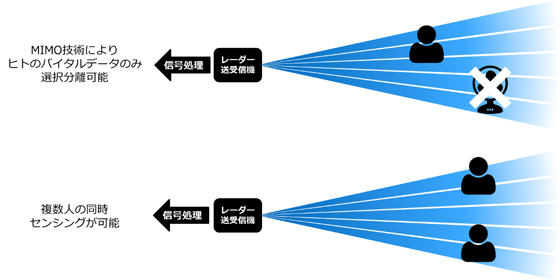
レーダーVSMは、体表に発生する振動(速度)情報を利用している。これは、設置環境において、ヒト以外に振動する物体が共存する場合、外乱ノイズが生じる問題となる。例えば、部屋に設置されたレーダーVSMセンサのFOV(視野)内に、ターゲットとなるヒトの傍にファンなどが存在した場合、ファンの振動が外乱ノイズとして作用し、正しいバイタルデータが取得できなくなる。この対策としては、FOVを狭くすることでターゲットを絞り込むことが行われるが、FOVは狭くなり、検知範囲がスポット(点)のようになってしまうトレードオフがある。(図5)
FOVを犠牲にすることなく、このような外乱ノイズを除去するもう一つの方法に、受信波の到来方向推定技術を利用する方式がある。これは、送受信が複数で構成されるMIMOレーダーを使うことで実現する。MIMOレーダーを使用することで、ヒトとファンのデータを信号処理で分類することが可能になり、特定方向にいる対象者(ヒト)だけを選択的にモニタリングすることが可能となる。このMIMOレーダーの特徴(方位方向の信号分離)を積極的に利用することで、複数人のヒトのバイタルセンシングを同時に行うことが可能になる。なお、MIMOレーダーにおける角度方向の分解能は、一般的にはMIMOチャネル数を増やすことで向上していくので、MIMOチャネル数を増やすことで、より多くの対象を測定可能である。(図6)
次回に続く-
参考文献
1) Accuracy of the Apple Watch 4 to Measure Heart Rate in Patients With Atrial Fibrillation, Dhruv R. Seshadri et.al., IEEE Journal of Translational Engineering in Health and Medicine Volume: 8, December 2019
2) Microwave Apexcardiography, J.C.Lin et.al., IEEE Transactions on Microwave Theory and Techniques Volume: 27, Jun 1979
3) Chest movement estimation from radar modulation caused by heartbeats, Øyvind Aardal et.al., 2011 IEEE Biomedical Circuits and Systems Conference (BioCAS), November 2011
【著者紹介】
高松 創(たかまつ はじめ)
アナログ・デバイセズ株式会社 リージョナルマーケティング
■略歴
1994年 東京工業大学 総合理工学研究科 システム科学専攻 修士課程修了
1994~2011年 半導体メーカでIC設計およびアプリケーションエンジニアとして従事
2011年より、アナログ・デバイセズ社で、プラットフォームの研究開発に従事し、現在に至る