
ボディシステム事業部
三谷 重知
3.脈拍数推定手法
レーダーで検出した生体の脈拍数を求めるために、身体の体表面の動きをドップラー角速度ωd1)を使って観測する。図4の左に示すようにI,Q信号で形成するI-Qリサージュ波形の位相θを定義すると、ドップラー角速度ωdは、位相θを時間微分したものである。また、この位相θにより同図右に示すように体表面の微細な動きを観察することが可能となる。位相θの値を変位量に換算すると、図では呼吸による変動が50μmに対し、脈動が10μmの微細な変動で観測できている。しかし、この変動は、測定する部位や体表面の支持の仕方によって異なる。また、非安静状態では、様々な体の動きが外乱となるため、脈動を観測することが困難となる。体表面の移動量が大きい場合、I-Qリサージュは、円軌道を周回するような軌跡を描くので、位相θではなくドップラー角速度ωdを使って観測する方が便利である。
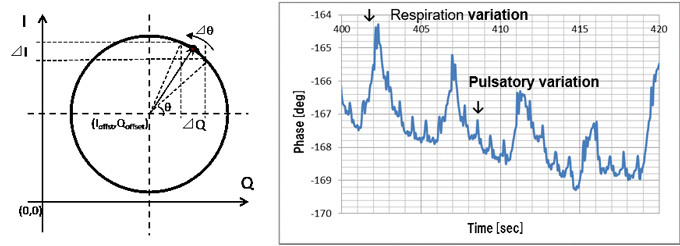
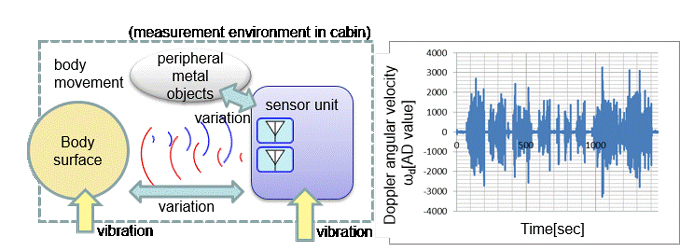
図5に、脈拍数推定における課題を示すために外乱の様子を示している。センサと身体表面や周辺金属物との位置関係が変動すると、受信信号の状態が変わるため外乱要因となる。更に、身体表面についてみると観測したい脈動の他に、呼吸体動や手足頭の動きなどに伴う自発体動や、走行時の車両振動を起因とする衝撃体動などが外乱として発生する。図5の右には、走行時に観測されるドップラー角速度ωdの変動の様子を示している。停車時の状態に対してはるかに大きい外乱が入り、脈拍数の推定が困難な状態となる。我々は、独自の信号処理の開発を行って、外乱の大きな状態から脈拍数の推定を行うことに成功している。
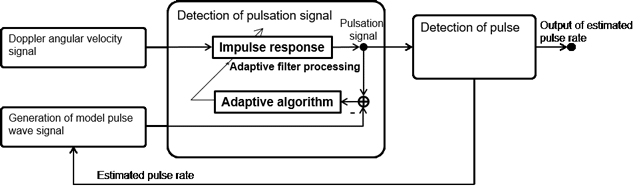
外乱に埋もれた状態から脈動信号を取り出すための基本アルゴリズムの概略を図6に示す。身体表面の動きを観測しているドップラー角速度信号ωdから脈動の周期成分に同期した信号を抽出し脈動信号とし、更にその信号からパルス検知を行ってパルス数をカウントして1分間当たりの脈拍数(bpm)を推定する。我々が開発したアルゴリズムでは、逐次処理により実際の脈動信号に同期するように、脈拍数推定値のフィードバックをかけてモデル脈波信号を生成する。モデル脈波信号生成では、予め脈拍数毎に脈波の特徴を記憶したテーブルを参照して、モデル脈波信号を生成する。このモデル脈波信号と適応フィルター処理後の脈動信号との差をとり、その二乗平均が最小となるような適応フィルターの係数更新を行う。この操作により、適応フィルター処理後の脈動信号は、実際の脈動信号に同期していく。
前述の逐次処理では、初期値の与え方によって誤った値に収束する場合がある。この対策として、比較的安静にしている一定期間のデータを使って、基準脈拍数を推定し初期値として用いている。その概略を図7に示す。図7の(a)には、観測データの状態を示している。一定の期間安静にしている区間がある場合に初期化処理を進め、初期化完了時に初期値をセットして逐次処理に移行する。初期化処理では、図7の(b)に示すように、観測データをフーリエ変換して得られる周波数ピークを安静区間ごとに求める。そして、図7の(c)に示すような度数分析を行い、脈拍数として尤もらしい値を基準脈拍数として決定する。このようにして、確度の高い値を求めることで、脈拍数推定の信頼性を高めている。
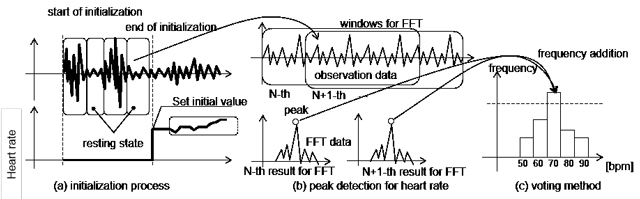
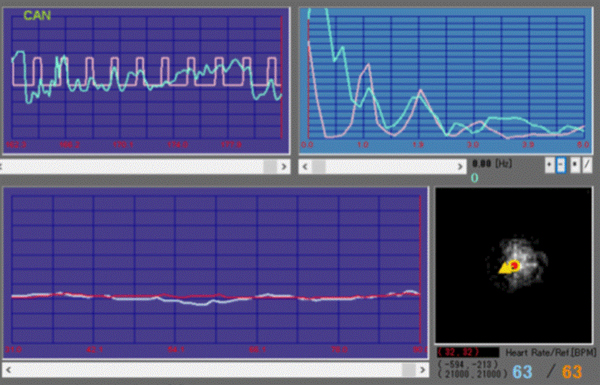
図8に脈拍数推定の実際の様子を解析画面で示している。画面の左上のグラフは、ドップラー角速度信号ωdの時間変化を水色、リファレンスセンサ(耳たぶ取り付けの光学式脈拍センサ)で取得した矩形パルス(脈拍)波形を桃色で示している。また、画面の右上は、それらをフーリエ変換した結果の周波数強度についてのグラフである。比較的安静にしている状態であれば、ドップラー角速度信号ωdの周波数成分には、リファレンスセンサで取得した脈拍成分に一致する成分が含まれることが確認できる。しかし、脈拍数を決定するためには、どのピークが基本周波数成分であるかを判断する必要がある。この課題を前述したアルゴリズムによって、適切な脈動の周期に同期させることで解決している。画面の左下には、脈拍数の時間変化を推定した結果を水色で示している。リファレンスセンサから得た値(赤色)に非常に良く一致した結果が得られている。また、画面の右下は、I-Qリサージュを表示している。このI-Qリサージュの挙動を分析することで、検出した生体を正しく観測できているか確認することも必要となる。例えば、十分な大きさの円弧を描いていることが重要になる。周囲金属物の影響などセンサの設置条件によっては、脈拍数の推定が困難な場合がある。
4.生体情報の分析
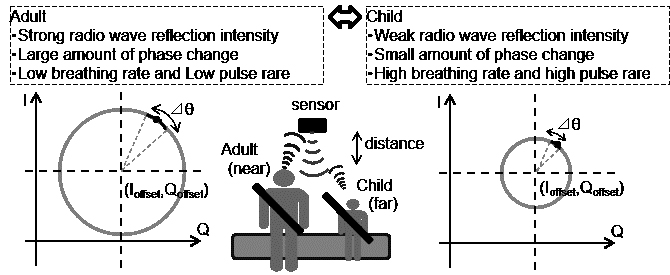
ミリ波レーダーから得られるI,Q信号を分析することで、生体の位置、大きさや動き、更に、呼吸数、脈拍数といった生体情報が得られる。これらを総合的に判断して、検出した生体が大人か子供かを判別することもできる。例えば、図9に示すようにセンサが天井に設置される場合を考えると、大人と子供では身長差があることからセンサまでの距離が異なる。また、体格が異なるので、電波を反射する面積に差を生じ、受信する信号強度にも差が現れる。つまり、I-Qリサージュを描いた場合、円の大きさが異なる。更に、大人より子供の方が呼吸数や脈拍数が高いことが知られているし、肺活量の差から呼吸時の体表面の変位量も異なる。これらの情報を使って大人か子供かについて多変量解析することで、信頼性を高めた判別が可能となる。
5.おわりに
先に示した手法によって、車室内でも信頼性を高めた生体情報が得られる。例えば、安静状態であれば、RMS誤差が5bpm内で脈拍数を推定することが可能である。これらの生体センシング技術を活用することによって、より安全性を高めることが期待できる。今後の課題としては、車載製品に求められるロバスト性の確保が必要である。例えば、センサの設置条件によっては、生体の見え方が変わるため調整が必要となる。様々な車両がある中で、センサの取り付け位置にも制約があり、ベストな設置方法が選べない場合がある。これらの環境要件を考慮して調整可能なように車両適合させていく技術の習熟が必要とされる。また、エアバックの制御など高度な信頼性が必要とされるアプリケーションでは、高分解能化が必要となる場合がある。その場合、アンテナ数を増やすべきなのかカメラなど他のセンサとフュージョンさせるべきなのか、機能拡張性やシステムコストなどを考慮して最適な方法を模索する必要がある。近い将来、本稿で紹介したインキャビン生体レーダー検出を活用した予防安全システムの開発を行い、社会の発展に貢献できれば幸いである。
【著者紹介】
三谷 重知(みたに しげとも)
日本電産モビリティ株式会社 ボディシステム事業部 技術専門職
■略歴
2004年 オムロン株式会社へ入社
2011年 オムロンオートモーティブエレクトロニクス株式会社へ転籍
2019年 日本電産モビリティ株式会社へ社名変更
デジタル信号処理技術を駆使したアルゴリズム開発に従事